这篇文章将从 摄像头 → SerDes → SoC → DDR → ISP → 显示 的整条链路来系统性地计算带宽,这才是汽车域控制器设计阶段真正需要核算清楚的核心内容。
一、为什么要算摄像头带宽?
许多硬件工程师在设计摄像头系统时,往往只关注一个显性参数:MIPI CSI lane 的数量。
但实际工程中,我们需要计算的是 5个关键带宽节点:
- 摄像头原始数据带宽
- SerDes(串行器/解串器)带宽
- MIPI CSI(摄像头串行接口)带宽
- ISP(图像信号处理器)内部处理带宽
- DDR(内存)读写带宽
任何一个环节的带宽不足,都可能导致系统性的问题,例如 ISP 丢帧、MIPI 数据溢出 或是 DDR 带宽被挤爆,严重影响自动驾驶功能的稳定性和实时性。因此,在系统架构设计之初,就必须将这些带宽账算明白。
二、摄像头原始数据带宽计算
摄像头产生的原始(RAW)数据带宽,其基础计算公式非常简单:
Bandwidth = Width × Height × FPS × BitDepth
其中,Width 和 Height 是分辨率,FPS 是帧率,BitDepth 是单像素的位深(如 10bit 表示为 10)。
但实际传输中,视频流还包含行消隐(H-Blanking)和场消隐(V-Blanking)等非有效像素数据。因此,更贴近实际工程的计算需要乘以一个开销系数,通常为 1.2 左右:
Bandwidth = Width × Height × FPS × BitDepth × 1.2
三、常见车载摄像头的带宽需求
我们可以通过一个表格直观感受不同规格摄像头的带宽压力:
| 分辨率 |
FPS |
数据格式 |
估算带宽 |
| 2MP |
30 |
RAW10 |
≈1.5 Gbps |
| 4MP |
30 |
RAW10 |
≈3 Gbps |
| 8MP |
30 |
RAW10 |
≈6 Gbps |
| 8MP |
60 |
RAW10 |
≈12 Gbps |
可以看到,一个 8MP(约 3300万像素)的摄像头在 30fps 下,带宽需求已达到 6Gbps 级别。这已经是一个相当可观的数字。
四、L2级自动驾驶的摄像头配置数量
一套典型的 L2/L2+ 级自动驾驶系统,其摄像头配置大致如下:
前视长焦 ×1
前视广角 ×1
环视摄像头 ×4
侧视摄像头 ×2
后视摄像头 ×1
驾驶员监控 (DMS) ×1
乘客监控 (OMS) ×1
简单相加:
总计:11 个摄像头 (cameras)
五、11个摄像头的总带宽计算
让我们基于一个主流的高端配置进行估算:
假设条件:
分辨率:8MP (3840 × 2160)
帧率:30 fps
数据格式:RAW10 (10bit/像素)
单路摄像头基础数据量:
3840 × 2160 × 30 × 10 ≈ 2.5 Gbps
考虑消隐区等开销 (×1.2):
单路有效带宽 ≈ 3 Gbps
单路总带宽 (含开销) ≈ 6 Gbps
那么,11路摄像头的总原始数据带宽为:
11 × 6 Gbps = 66 Gbps
这个数字(约 66 Gbps)是许多工程师第一次计算时会感到惊讶的。它意味着数据管道必须拥有极高的吞吐能力。
六、SerDes 链路的带宽规划
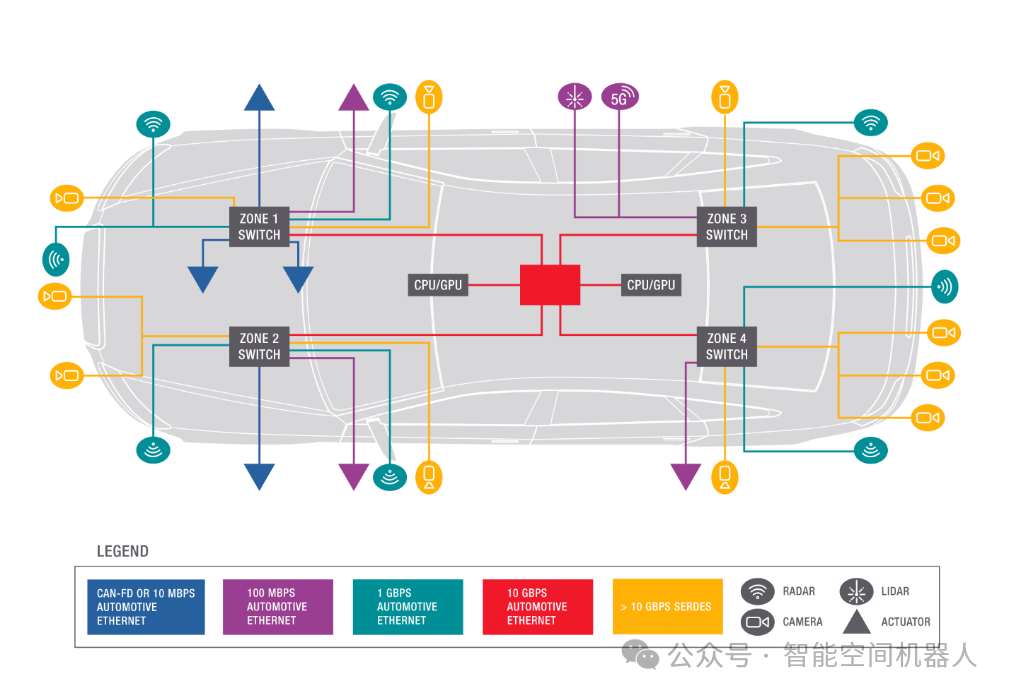
汽车Zonal架构网络拓扑示意图(图中标注了不同速率的总线)
在车辆中,摄像头通常不会直接通过长距离的并行线束连接域控制器,而是通过 SerDes 技术进行传输。其典型链路结构如下:
Camera
│
Serializer (串行器)
│
Coaxial Cable (同轴电缆) / STP
│
Deserializer (解串器)
│
MIPI CSI
│
SoC
因此,选用的 SerDes 技术必须能满足单路摄像头的带宽需求。以下是常见车载 SerDes 技术的标称带宽:
| 技术 |
单链路标称带宽 |
| GMSL2 |
6 Gbps |
| GMSL3 |
12 Gbps |
| FPD-Link III |
4 Gbps |
| FPD-Link IV |
8 Gbps |
对于前述 8MP @ 30fps (≈6Gbps) 的摄像头,至少需要选用 GMSL2 或 FPD-Link IV。这也是为什么当前许多高端 ADAS 方案倾向于选用 GMSL3,它为更高的分辨率和帧率预留了空间。
七、SoC 入口:MIPI CSI 接口带宽
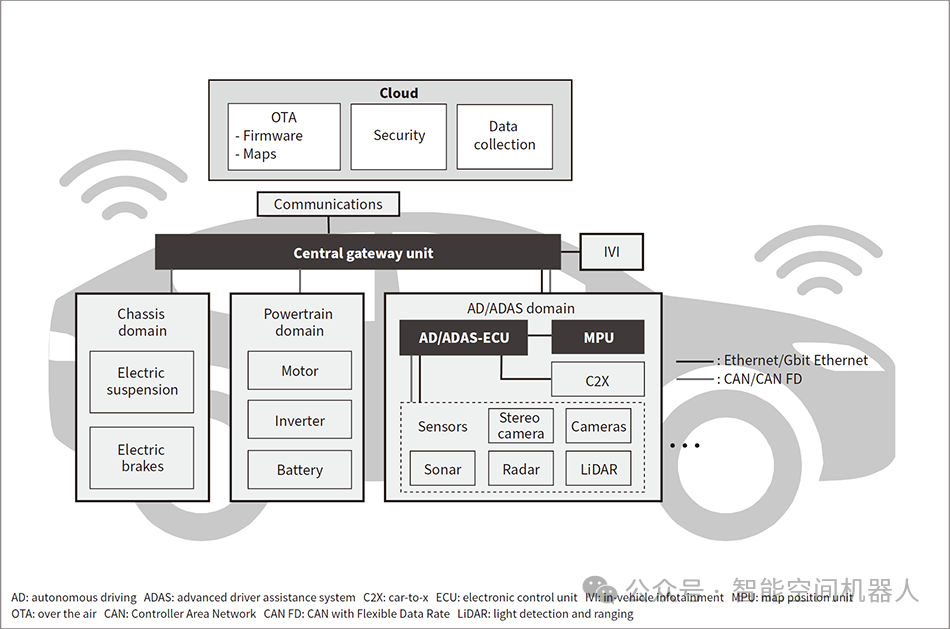
车载域控系统架构框图(展示了不同域之间的网络连接)
数据通过解串器后,便进入 SoC 的 MIPI CSI-2 接口。这是 ISP 模块的数据入口。
假设 SoC 提供一个 16 lane 的 CSI-2 接口,每 lane 的速率按 2.5 Gbps 计算:
总入口带宽 = 16 lane × 2.5 Gbps/lane = 40 Gbps
显然,40 Gbps 的入口带宽无法同时接纳 66 Gbps 的原始数据。因此,在实际设计中,必须通过 多个独立的 CSI 接口 来分流这11路摄像头的数据。例如,使用 2 个甚至 3 个 CSI 接口组,是常见的解决方案。
八、ISP 处理带宽
ISP 是计算密集型模块,它需要对原始的 RAW 数据进行一系列处理,包括:
- 去噪 (Denoise)
- 高动态范围合成 (HDR)
- 去马赛克 (Demosaic)
- 色彩校正 (Color Correction) 等
这些处理过程往往意味着数据在 ISP 内部会被多次存取和运算。因此,ISP 内部的数据流带宽通常远高于其输入带宽,经验值约为:
ISP 内部处理带宽 ≈ 输入带宽 × (2 ~ 3)
如果总输入带宽是 66 Gbps,那么 ISP 需要处理的内部带宽可能高达:
66 Gbps × 2.5 ≈ 165 Gbps
这个巨大的数据流对 SoC 内部总线架构和 ISP 自身算力提出了严峻挑战。
九、DDR 系统带宽压力
处理前、后的图像数据都需要在 DDR 中缓存。DDR 的带宽是所有模块(ISP、CPU、GPU、NPU)共享的资源,必须仔细核算。
DDR 带宽计算公式为:
DDR 带宽 (GB/s) = (总线位宽 × 数据速率) / 8
更直观的工程算法是:
DDR 带宽 (GB/s) = 总线位宽 × 数据速率 × 2
(因为DDR是双倍数据速率)
例如,一个 LPDDR5 配置:
总线位宽:64 bit
数据速率:6400 MT/s
其峰值带宽约为:
(64 × 6400 × 2) / 8 / 1000 ≈ 102.4 GB/s
或 64 × 6.4 × 2 ≈ 819 Gbps (理论值,实际略低)
尽管 DDR 总带宽看起来很高(约 800 Gbps 量级),但需要减去 操作系统、应用、其他传感器(雷达、激光雷达)融合等占用的部分。留给11路摄像头数据读写的带宽必须留有充足余量,通常建议利用率不超过70%。
十、显示输出带宽
最后,如果需要将某些摄像头画面显示在车载屏幕上,还需要计算显示通道的带宽。公式与摄像头原始数据类似:
显示带宽 = 分辨率 × 刷新率 × 色彩深度
例如,驱动一块 4K 屏幕:
分辨率:3840 × 2160
刷新率:60 Hz
色彩格式:RGB888 (24bit)
所需带宽约为:
3840 × 2160 × 60 × 24 ≈ 12 Gbps
这部分通常通过 MIPI DSI 或 eDP 接口连接。
十一、完整的视频数据链路
现在,我们可以勾勒出从物理摄像头到最终显示的完整数据路径:
Camera (传感器)
│
SerDes Link (串行链路)
│
Deserializer (解串器)
│
MIPI CSI-2 (接口)
│
SoC ISP (图像处理)
│
DDR Memory (缓存)
│
GPU/NPU (分析/渲染)
│
MIPI DSI/eDP (显示接口)
│
Display (屏幕)
十二、未来技术趋势展望
车载视频链路技术仍在快速演进,主要方向有三个:
1. A-PHY
由 MIPI 联盟推动的标准化车载高速串行接口,旨在统一 SerDes 市场。其优势包括传输距离长(可达15米以上)、速率高(初期16Gbps,未来更高)、以及更好的EMI性能。
2. Automotive Ethernet (车载以太网)
摄像头直接集成以太网 PHY,通过单对非屏蔽双绞线(如 1000BASE-T1)接入车载以太网交换机。这种方式更有利于实现灵活的传感器布局和集中化的数据处理,是面向下一代“软件定义汽车”架构的关键技术。
3. Sensor Fusion (多传感器融合)
带宽压力不仅来自摄像头,还来自高分辨率激光雷达和4D成像雷达。未来的域控制器需要具备同时处理海量异构传感器数据的能力,这对内部总线和计算架构提出了更高要求。
总结
回到最初的问题:一套配备 11 个 8MP @ 30fps 摄像头的 L2+ 自动驾驶系统,其视频数据链路的带宽需求峰值大约在 66 Gbps 量级。
在进行硬件选型和系统设计时,必须通盘考虑并验证以下关键环节的带宽是否匹配:
- SerDes 链路的总带宽与单路带宽
- SoC 的 MIPI CSI 接口数量与速率
- ISP 模块的处理能力与内部带宽
- DDR 系统的实际可用带宽余量
任何一个环节成为瓶颈,都可能导致系统性能下降甚至功能失效。希望这份从硬件工程师视角出发的带宽计算指南,能为你的自动驾驶系统设计提供有价值的参考。如果你对汽车网络或系统架构有更深入的兴趣,欢迎在 云栈社区 与同行们交流探讨。
 发表于 2026-3-29 01:51:25
|
查看: 136|
回复: 0
发表于 2026-3-29 01:51:25
|
查看: 136|
回复: 0
