PLL(Phase-Locked Loop,锁相环)
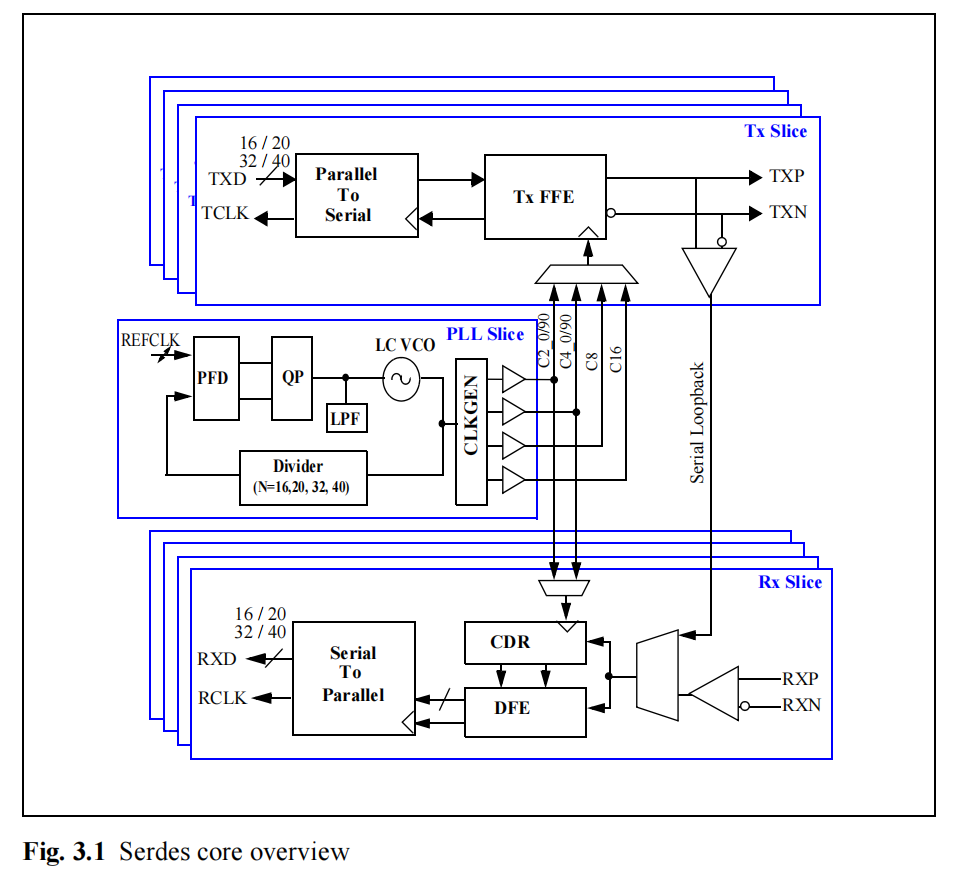
如果要粗略地拆分 Serdes 的结构,通常可以说 Serdes Core 由 Tx、Rx 以及 PLL 三个子模块组成,如图 3.1 所示。本文将详细介绍 PLL 的实现原理和内部结构,帮助读者理解。
PLL 的用途:
- well‑defined clock —— 需要有明确定义的时钟供系统或者模块使用,用于同步。
- 分频或者倍频时钟,可以在系统内部进行时分复用。
- Frequency Synthesizer 频率合成器,在多载波系统中快速跳频,例如蓝牙、WiFi 通信中切换 channel。只有 PLL 能够做到低相邻载波干扰。
- CDR(clock data recover)时钟恢复。这也是 Serdes 里面重要应用。
- 频率调制,例如 FM,FSK,QAM,OFDM 等。
- SSC(Spread Spectrum Clocking,扩频时钟),串行协议中的时钟频率偏移,用于降低电磁干扰(EMI,Electromagnetic Interference)。

通过输入一个参考时钟,PLL 可以输出你想要的时钟。
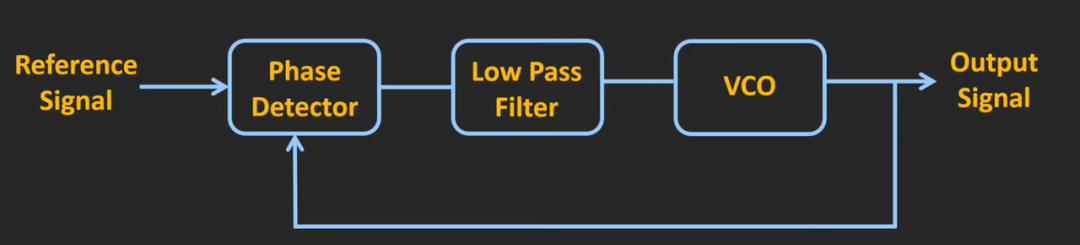
最简单的 PLL 结构,Simple PLL
假设有一个异或门,两个输入为 V1、V2,输出为 Vo:
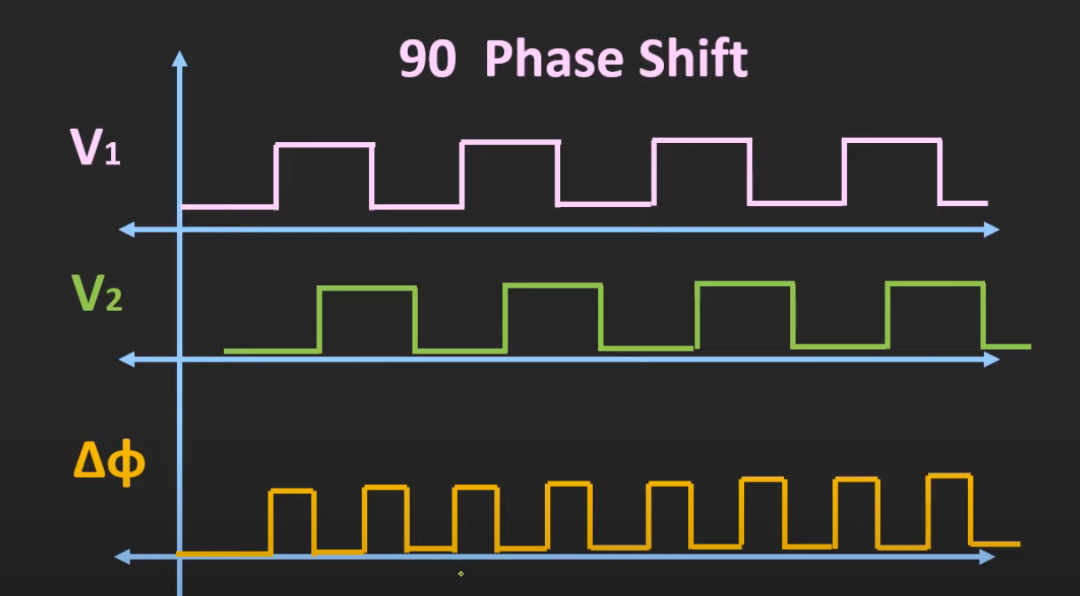
它们之间的相位关系如上图所示。让输出 Vo 经过一个低通滤波器,那么滤波后的电压可以看成平均值,这个平均电压和 V1、V2 之间的相位差是线性关系,如下图所示:
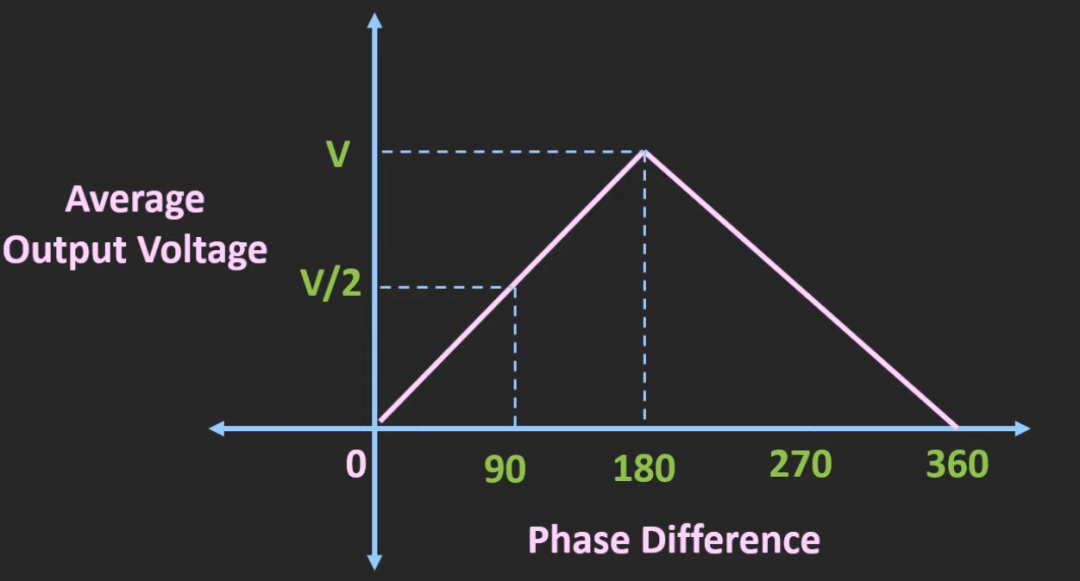
由这个输出电压来控制 VCO(压控振荡器):
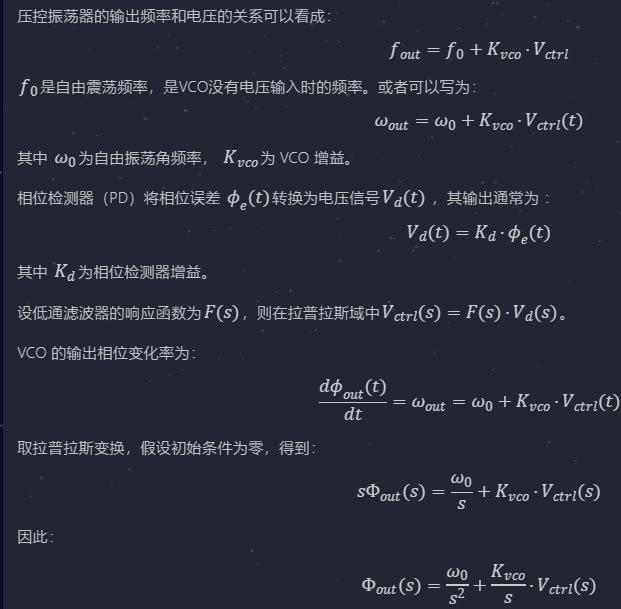
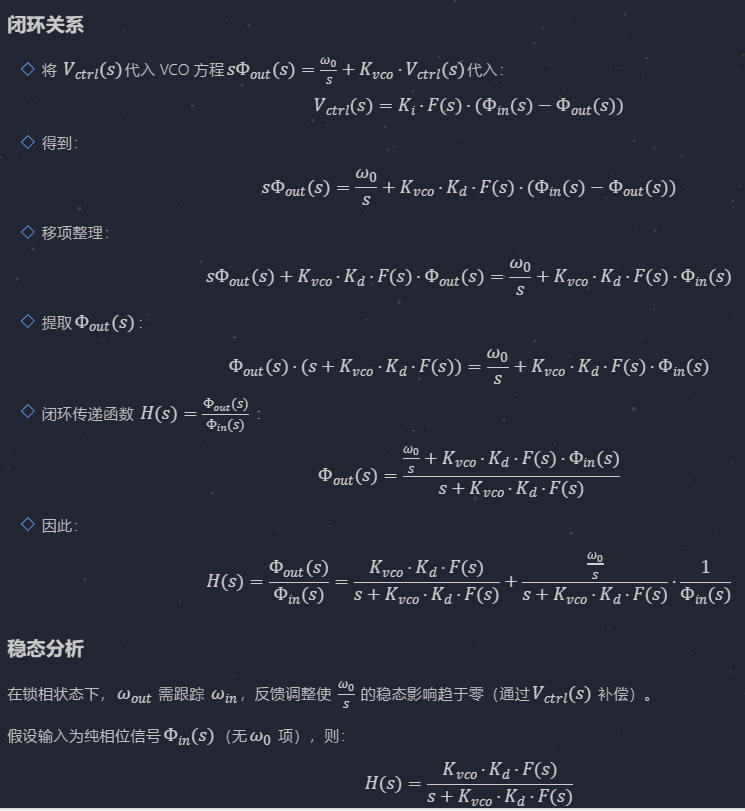
这就说明整个 PLL 的传递函数 $H(s)$ 可以看成是一个二阶的低通滤波器。也就是说,如果输入信号频率(相位)突变,输出会缓慢跟随直至相等。具体是怎么恢复到稳态,与低通滤波器和 VCO、PD 属性有关,即过阻尼、欠阻尼、临界阻尼三种跟随方式。
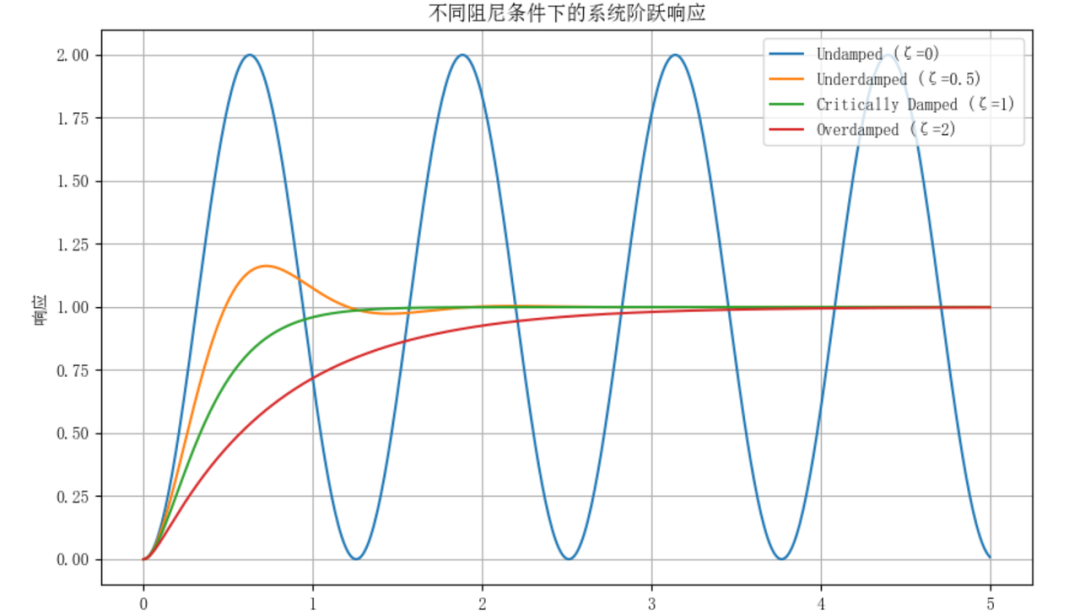
图中通过欠阻尼 ($\zeta < 1$) 和过阻尼 ($\zeta > 1$) 的响应曲线,揭示了 PLL 设计中的动态性能与稳定性的矛盾,总结如下:
- 欠阻尼 ($\zeta < 1$):响应曲线显示振荡,即输出 $\omega_{out}$ 在跟踪 $\omega_{in}$ 时出现过冲和振荡,最终收敛。问题在于振荡可能导致相位噪声或频率不稳定,尤其在高速频段(RF/Wireless/mmWave 应用)中影响信号质量。适合需要快速响应的场景,但牺牲了稳定性。
- 过阻尼 ($\zeta > 1$):响应曲线平滑上升,无振荡,但收敛较慢。缓慢的上升时间可能无法满足快速通道切换的需求,尤其在无线通信中要求快速频率调整。适合需要稳定性的场景,但牺牲了响应速度。
总结异或门 + 低通滤波器的具体问题
- 异或门作为相位检测器:异或门输出与相位差 $\phi_e$ 成线性关系,但其增益 $K_d$ 较低,且对大相位误差($>\pi$)非线性,限制了锁相范围。低增益导致 $K_{vco} K_d$ 较小,环路带宽窄,动态响应较慢。
- 低通滤波器 (LPF):LPF 滤除高频噪声,但若截止频率设计不当(太低),会进一步减慢响应;若太高,则无法有效抑制振荡。
这也说明了这种结构的 Simple PLL 存在着以下问题:
- 稳定时间和抖动之间的矛盾。
- Phase 之间的关系不确定,随着温度电路改变。
- 存在稳定性问题,即欠阻尼下过冲振荡。
- 不知道锁定范围有多大,与回路带宽有关。
参考:李致毅教授,B 站视频:鳌中堂讲电路
更多硬件设计知识,欢迎来 云栈社区 一起交流。 |  发表于 2026-5-26 03:27:35
|
查看: 264|
回复: 0
发表于 2026-5-26 03:27:35
|
查看: 264|
回复: 0
