DeerFlow 2.0:Lead Agent 与 Sub-Agent 配合机制与使用决策指南
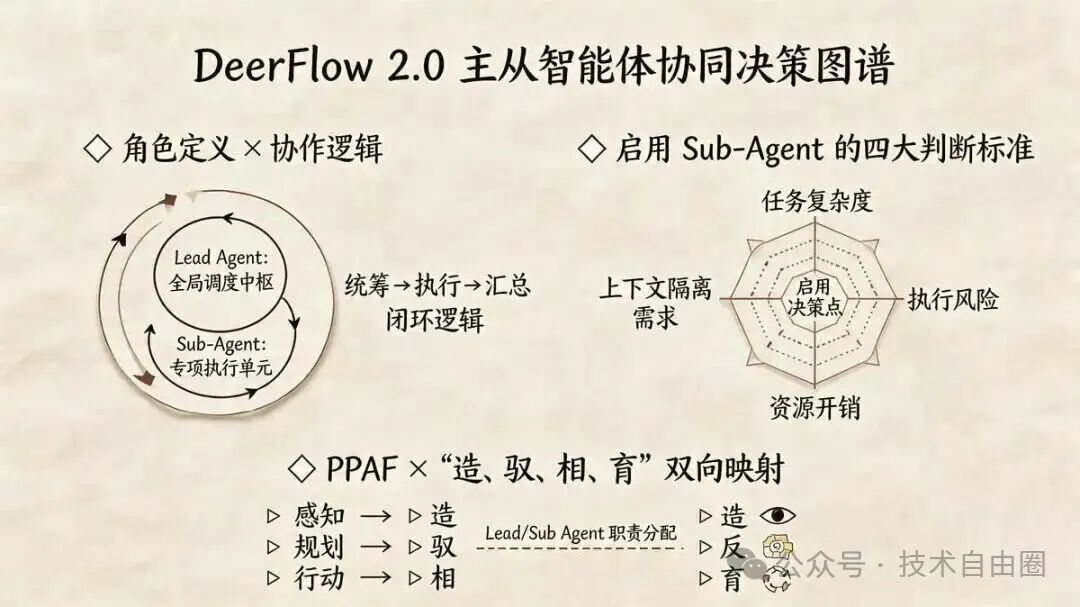
在 DeerFlow 2.0 主从架构中,Lead Agent 是全局调度中枢,Sub-Agent 是专项执行单元。
两者的配合遵循 “统筹—执行—汇总” 的闭环逻辑,而是否启用 Sub-Agent 核心取决于任务复杂度、执行风险、资源开销与上下文隔离需求。
DeerFlow 2.0 主从架构是 PPAF 智能体执行范式 (感知-规划-行动-反思)的工程化落地。
Lead Agent 与 Sub-Agent 分别承担 PPAF 不同环节的核心职责,同时依托“造、驭、相、育”四步工程化支撑体系,实现智能体协作的稳定、高效与可迭代。
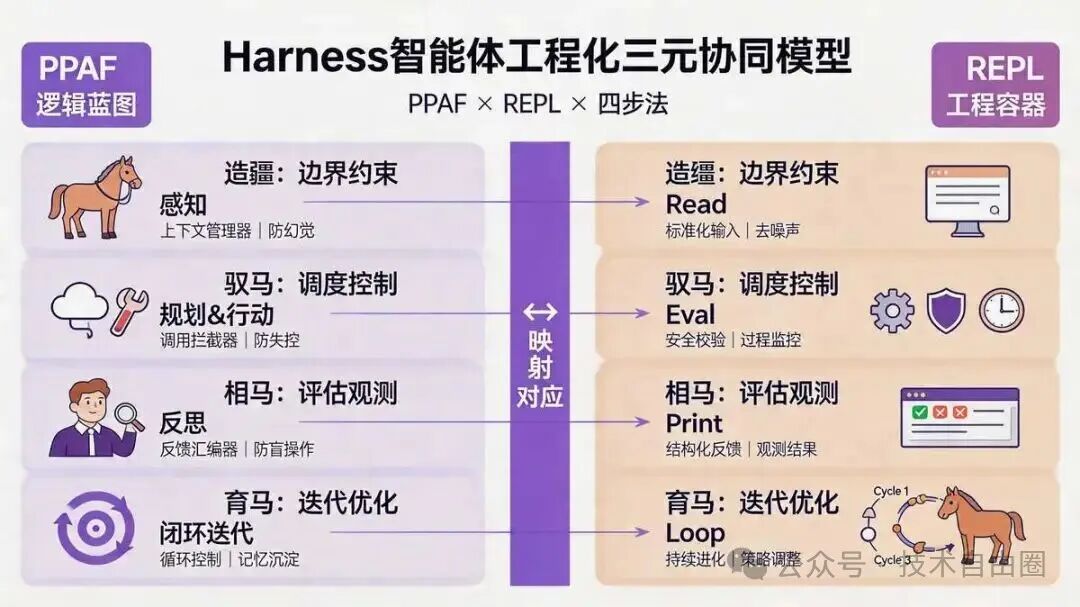
Harness 对应“造缰、驭马、相马、育马”四步支撑法,每一步都对应 PPAF 的核心环节,精准解决“工程落地难”的问题:
- 造缰(Making the Reins):给智能体“套上缰绳”,定义清晰的接口、协议和约束。比如规定智能体能接收什么格式的输入、能调用哪些工具、输出什么格式的结果,避免智能体“越界”,支撑 PPAF 的“感知”环节(确保采集的信息规范、安全)。
- 驭马(Riding the Horse):驾驭智能体按规划执行,实现策略、调度与执行控制。比如智能体规划好要调用 3 个子代理,“驭马”就负责安排哪个先执行、哪个后执行,执行过程中遇到问题如何处理,支撑 PPAF 的“规划”和“行动”环节。
- 相马(Evaluating the Horse):观察和评估智能体的表现,建立监控、度量体系。比如实时查看智能体的执行状态(是否卡住、是否报错)、Token 使用量、任务完成率,支撑 PPAF 的“反思”环节(通过评估结果发现问题、修正策略)。
- 育马(Breeding the Horse):让智能体持续进化,构建记忆、训练、迭代体系。比如把每次任务的复盘经验存入记忆,定期优化模型和策略,让智能体越用越精准,支撑 PPAF 的“反思”和“长期感知”环节。
下面从协作原理、配合流程、使用场景(必须用 / 不建议用 / 可不用)、决策判断标准、工程化支撑、源码示例六方面完整说明。
基础知识(1):PPAF 智能体执行范式
PPAF 智能体执行范式与 REPL 容器对接工程,是 Harness 平台层 (包括 DeerFlow 2.0) 主从代理架构实现工程化落地的核心架构思维支撑。
二者深度融合,既保障智能体的自主决策能力,又实现执行过程的可控、可观测与可迭代。
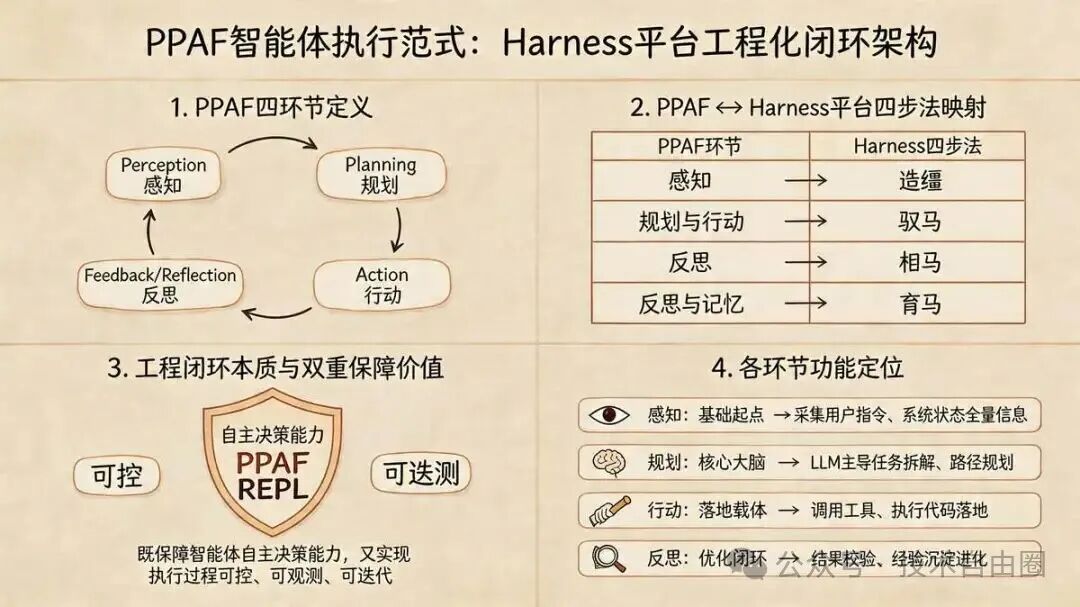
PPAF智能体执行范式 ,主要包括4个环节: Perception感知、Planning规划、Action行动、Feedback/Reflection反思。
PPAF智能体执行范式 , 是智能体执行任务的标准工程闭环框架,构建了“感知→规划→行动→反思”的完整循环。
- 感知作为基础起点,通过各类接口采集用户指令、系统状态等全量信息;
- 规划作为核心大脑,由LLM主导任务拆解、路径规划与资源分配;
- 行动作为落地载体,通过调用工具、执行代码等方式实现交互落地;
- 反思作为优化闭环,通过结果校验、偏差修正与经验沉淀,推动智能体持续进化。
PPAF智能体执行范式,可以完整对应到 Harness 平台层 对应的 “造缰、驭马、相马、育马”四步法支撑体系,分别为感知、规划与行动、反思、反思与记忆环节提供边界约束、调度控制、评估观测与迭代优化能力。
基础知识(2): REPL 循环容器
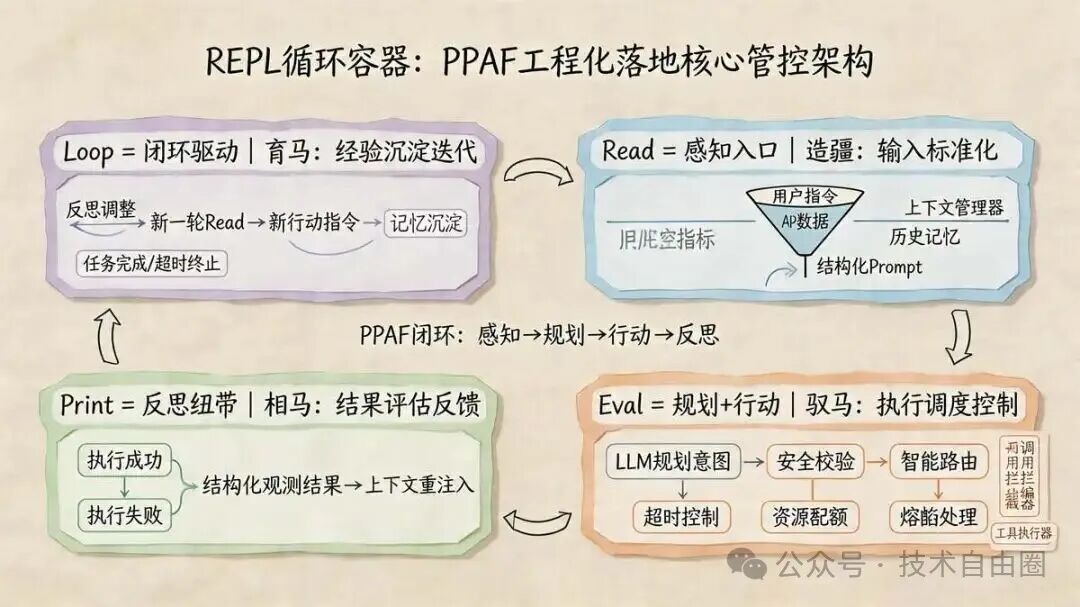
REPL 循环容器, 包括四环节:Read(读取) -Eval(评估) -Print(打印) -Loop(循环 ) 。
REPL 循环容器, 是PPAF 实现工程化落地 实现.
REPL 循环容器 本质是: 一个带有严格边界控制、智能工具路由与确定性反馈机制的管控容器。
REPL 循环容器 核心: 是一个 包裹住大语言模型(LLM)这个非确定性的“智能大脑”,将LLM 灵活的推理能力 ,与确定性的 工程执行体系进行无缝衔接。
REPL 循环容器 核心: 不确定性的 大语言模型(LLM) + 确定性的API调用。
REPL 循环容器 与 PPAF 智能体执行范式 的关系是什么呢?
- REPL 循环容器, 是 PPAF 落地层面的 设计思维与模式,
- PPAF 是 天上飞的指导思想,REPL 循环容器 地上跑的落地规范,
- REPL 循环容器 让PPAF 的“感知→规划→行动→反思”闭环能够稳定、可控地落地。
DeerFlow 2.0 是 REPL 循环容器 的一个具体的落地, DeerFlow 2.0 中的REPL容器经过工程化适配,深度融入“造、驭、相、育”四步法支撑体系。
REPL 循环容器, 其核心逻辑与PPAF各环节的耦合的细节的如下:
(1) Read(读取)环节
Read(读取)环节 是REPL容器 对应 PPAF感知环节的核心入口,主要由上下文管理器(Context Manager)负责执行。
该环节的核心任务是完成“信息标准化”,将外部世界的零散信息与内部记忆进行整合、清洗与结构化处理,最终转化为LLM能够精准理解的Prompt格式。
外部世界的零散信息 包括用户指令、外部API返回的结构化数据、系统内部监控指标。内部记忆 包括 历史对话记录、过往执行经验。
这一过程完美契合“造缰”工程化支撑的核心目标——为感知环节提供清晰、稳定的输入通道,确保PPAF感知环节采集的信息全面、准确、结构化,为后续规划环节奠定基础。
(2) Eval(评估/执行)环节
Eval(评估/执行)环节 是REPL容器对应 PPAF规划与行动环节的核心载体,由调用拦截器(Call Interceptor)与工具执行器协同完成。
当LLM基于Read环节的结构化Prompt,生成规划意图(如任务拆解方案、工具调用指令等)时,调用拦截器会实时捕获这一意图,首先对意图的合理性、安全性进行校验(贴合“造缰”的边界约束要求),随后根据规划意图的类型,将其精准路由至对应的工具执行器。
在工具执行过程中,REPL容器会对执行全流程进行严密监控,包括执行超时控制、资源配额限制、异常捕获与熔断处理,这既体现了“驭马”工程化支撑的调度控制能力,也通过过程监控为“相马”环节的评估提供了实时数据支撑,确保PPAF行动环节的执行精准、安全、高效。
(3) Print(打印/反馈)环节
是REPL容器 对应 PPAF反思环节的关键纽带,由 反馈汇编器(Feedback Assembler)负责实现。
当工具执行完成后,无论执行成功(返回结构化数据)还是失败(返回异常信息),反馈汇编器都会及时捕获这些执行结果,将其组装成标准化、结构化的“观测结果”,并重新注入到系统上下文中,供LLM进行下一轮的反思与规划。
这一过程既为PPAF反思环节提供了客观、全面的反馈数据,也契合“相马”工程化支撑的评估需求,让LLM能够清晰掌握行动执行的实际情况,为偏差修正、策略调整提供依据。
(4) Loop(循环)环节
是驱动PPAF闭环持续运转的核心动力,也是REPL容器的核心特性。
Read-Eval-Print三个环节并非一次性执行,而是在REPL容器的控制下持续循环推进:LLM基于Print环节的反馈结果进行反思,调整规划策略,随后触发新一轮的Read环节(读取更新后的上下文与规划意图)、Eval环节(执行新的行动指令)、Print环节(反馈新的执行结果),直至智能体达成任务目标、触发终止条件(如任务完成、执行失败超时).
整个循环过程完美复刻了PPAF“感知→规划→行动→反思”的持续迭代逻辑,也让“育马”工程化支撑的迭代优化能力得以落地: 每一次循环中的经验与偏差,都会被系统记录并沉淀为记忆,用于后续任务的优化。
为何将 REPL 称为循环容器?
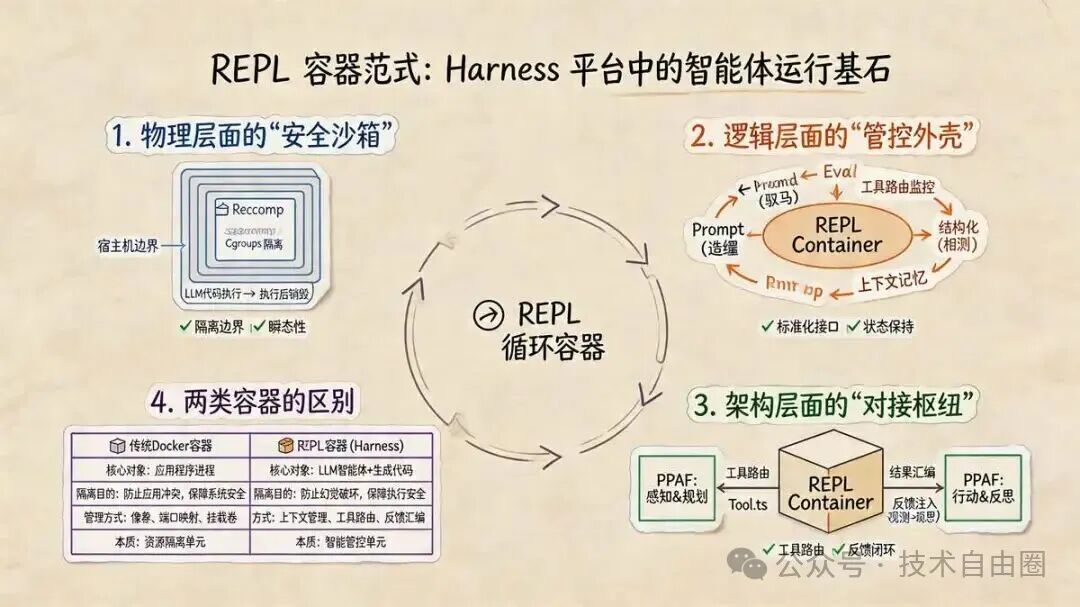
在 Harness 平台(DeerFlow 2.0)的语境下,将 REPL 称为“循环容器”,并不是指它仅仅是一个简单的代码运行环境,而是借用了计算机科学中“容器”的深层含义——边界控制、环境隔离与生命周期管理。
尼恩提示:原文1w字以上, 超过平台限制, 此处省略 1000字,具体请参考 免费pdf。
完整版本,请参考 尼恩 免费百度网盘 免费pdf ,点赞收藏本文后,找尼恩获取
PPAF、REPL 与“Harness 四步法”思维的对照关系
- PPAF 提供了智能体运作的逻辑蓝图。
- REPL 提供了工程化落地的容器标准。
- “四步法” 则是 Harness 平台在 REPL 容器内部署的具体管控策略,确保了智能体既有自主决策的灵活性,又有工程执行的稳定性。
| PPAF 环节 |
REPL 容器环节 |
核心组件/动作 |
对应“四步法” |
工程化价值 |
| 感知 |
Read (读取) |
上下文管理器 信息标准化 |
造缰 (边界约束) |
确保输入清晰、稳定,为智能体套上“缰绳”,防止信息噪声干扰。 |
| 规划 & 行动 |
Eval (评估/执行) |
调用拦截器 工具执行器 |
驭马 (调度控制) |
在行动前进行安全校验与路由,在执行中进行资源与超时控制,确保“驾驭”风险。 |
| 反思 |
Print (打印/反馈) |
反馈汇编器 观测结果注入 |
相马 (评估观测) |
将执行结果转化为客观的“观测数据”,用于评估行动质量,识别“良马”与策略优劣。 |
| 闭环迭代 |
Loop (循环) |
循环控制 记忆沉淀 |
育马 (迭代优化) |
通过不断的循环执行,将经验沉淀为记忆,实现智能体的持续进化与“培育”。 |
1. Harness 造缰:为感知(Perception)与读取(Read)设定边界
对应关系: PPAF 的感知 →→ REPL 的 Read。
如何运作:
“造缰”的核心在于边界约束。在 REPL 的 Read 环节,上下文管理器(Context Manager)不仅仅是读取数据,更是在“清洗”和“标准化”数据。它将外部零散的用户指令、API 数据转化为 LLM 能精准理解的 Prompt。
价值:
就像给马套上缰绳一样,这一步确保了智能体接收到的信息是结构化、无噪声的,防止 LLM 因为输入混乱而产生幻觉或错误理解,为后续的规划打下坚实基础。
2. Harness 驭马:管控规划(Planning)与行动(Action)及评估(Eval)
对应关系: PPAF 的规划/行动 →→ REPL 的 Eval。
如何运作:
“驭马”的核心在于调度控制。当 LLM 在 Eval 环节生成意图后,调用拦截器(Call Interceptor)会立即介入。它不仅要路由工具,更要进行安全校验(意图是否合理?)和过程监控(是否超时?资源是否超标?)。
价值:
这一步将 LLM 的“非确定性推理”关进了“确定性执行”的笼子里。它确保了智能体的行动是安全的、可控的,不会因为错误的规划导致系统崩溃或无限循环。
3. Harness 相马:通过反馈(Feedback)与打印(Print)进行评估
对应关系: PPAF 的反思 →→ REPL 的 Print。
如何运作:
“相马”的核心在于评估观测。Print 环节通过反馈汇编器(Feedback Assembler)将工具执行的结果(无论是成功数据还是异常报错)封装成标准化的“观测结果”。
价值:
这相当于伯乐在观察马的奔跑姿态。系统通过 Print 环节获得客观的执行反馈,LLM 才能据此判断刚才的行动是否正确,从而进行有效的反思。没有这个环节,智能体就是“盲人摸象”,无法感知行动后果。
4. Harness 育马:驱动闭环(Loop)与持续进化
对应关系: PPAF 的持续迭代 →→ REPL 的 Loop。
如何运作: “育马”的核心在于迭代优化。Loop 环节不是简单的重复,而是带着“记忆”的循环。每一次 Read-Eval-Print 产生的经验和偏差都会被记录。
价值: 通过不断的循环,智能体能够基于历史反馈调整策略。这种机制让系统具备了成长性,每一次任务的执行都在“培育”智能体,使其在未来处理类似任务时更加高效。
DeerFlow 源码中,Lead Agent 与 Sub-Agent 如何配合?
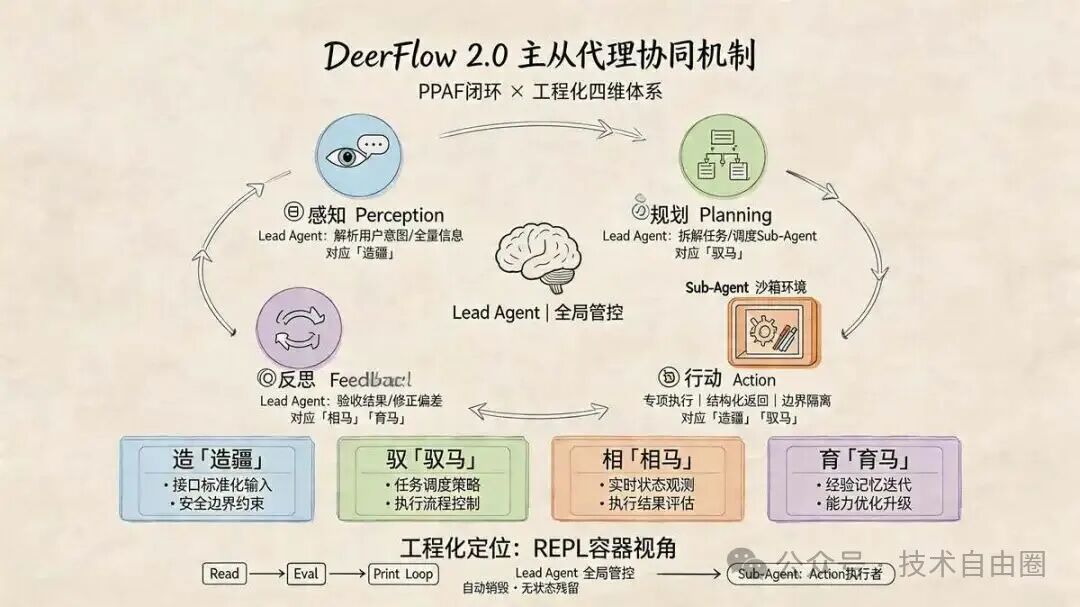
DeerFlow 2.0 主从代理的协作逻辑,完全贴合 PPAF(Perception 感知、Planning 规划、Action 行动、Feedback/Reflection 反思)智能体执行闭环模型,其中 Lead Agent 主导“感知、规划、反思”三大核心环节,Sub-Agent 专注于“行动”环节的专项落地,两者通过严格解耦实现高效协同,同时依托“造、驭、相、育”工程化体系,确保协作的边界可控、调度有序、可观测可迭代。
Lead Agent(主代理): PPAF 闭环的“大脑中枢”,承载“造缰、驭马、相马、育马”核心职责
不执行具体工具 / 代码 / 操作,只专注于全局决策与闭环管控,是 PPAF 模型中“感知、规划、反思”环节的核心载体,同时承担“造、驭、相、育”四步工程化支撑的核心职责,具体如下:
核心职责(对应PPAF闭环):
- 感知(Perception):精准解析用户意图、采集任务相关的全量信息(包括用户指令、历史对话、系统状态等),对应“造缰”工程维度的接口标准化输入,确保感知的全面性与准确性;
- 规划(Planning):对复杂任务进行拆解、筛选适配的 Sub-Agent、规划执行路径(同步/异步)、分配资源,对应“驭马”工程维度的策略与调度控制,确保规划的合理性与高效性;
- 反思(Feedback/Reflection):验收 Sub-Agent 的执行结果、消解执行过程中的冲突、修正执行偏差,同时将执行经验与偏差信息纳入记忆体系,对应“相马”(评估观测)与“育马”(迭代优化)工程维度,实现闭环迭代;
- 全局管控:持有完整全局状态、全量工具权限、最高调度权,对接 LangGraph 图执行,控制整个 PPAF 闭环的流程走向与终止条件,确保全局可控。
工程化定位:
作为 Harness 工程化体系的核心载体,承担 REPL 容器的“Read(读取)、Eval(评估)、Print(反馈)、Loop(循环)”全局管控职责,将 LLM 的非确定性推理能力,接入到确定性的工程执行体系中。
Sub-Agent(子代理): PPAF 闭环的“执行终端”,依托工程化体系实现安全高效行动
具备专项能力、最小权限、沙箱隔离特性,专注于 PPAF 模型中“行动”环节的专项落地,是“驭马”(执行控制)与“造缰”(边界约束)工程维度的具体体现,具体如下:
核心职责(对应PPAF闭环):
- 行动(Action):接收 Lead Agent 分配的子任务,在沙箱环境中独立执行(调用专项工具、执行代码、处理专项任务),并以结构化形式返回执行结果,不干预全局 PPAF 闭环流程;
- 边界约束:上下文完全隔离、工具权限受限(仅持有完成子任务所需的最小权限)、独立超时/终止条件,对应“造缰”工程维度的安全边界与接口约束,避免执行过程对全局系统造成影响。
工程化定位:作为 REPL 容器中“Action”环节的具体执行者,被 Lead Agent 调度管控,执行完成后自动销毁,无状态残留,既降低资源开销,也符合“造缰”工程维度的安全隔离要求,同时其执行状态可被“相马”体系实时观测。
Lead Agent 与 Sub-Agent 标准协作流程(结合 PPAF与REPL容器逻辑)
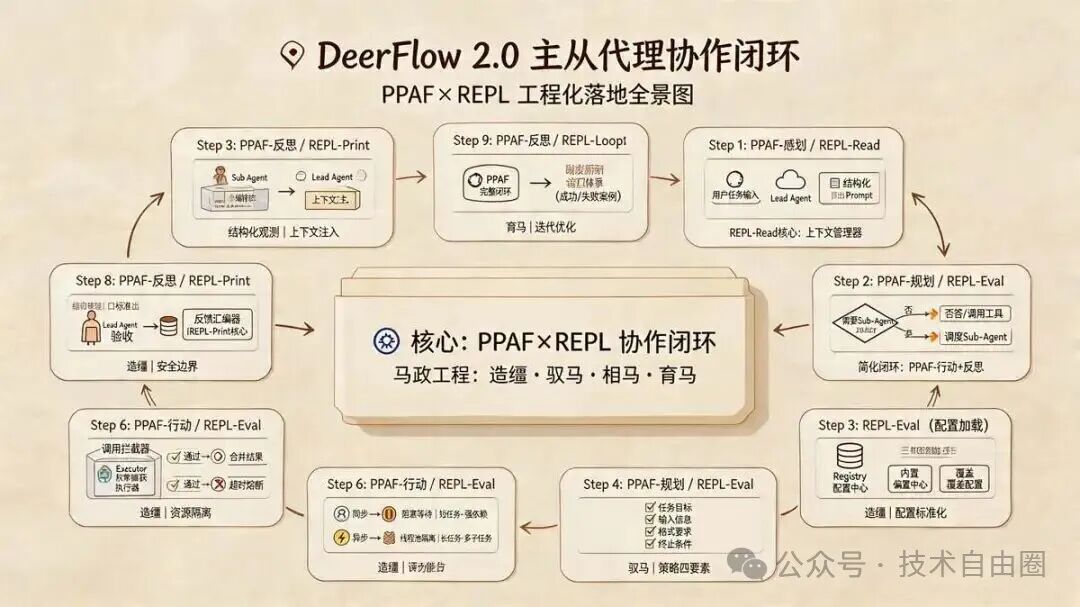
DeerFlow 2.0 主从代理的标准协作流程,是 PPAF 闭环与 Harness REPL 容器逻辑的完整落地,形成“感知→规划→行动→反思”的生产级闭环,每一步均对应工程化支撑体系的具体要求
尼恩提示:原文1w字以上, 超过平台限制, 此处省略 1000字,具体请参考 免费pdf。
完整版本,请参考 尼恩 免费百度网盘 免费pdf ,点赞收藏本文后,找尼恩获取
Lead Agent 与 Sub-Agent 三种典型协作模式
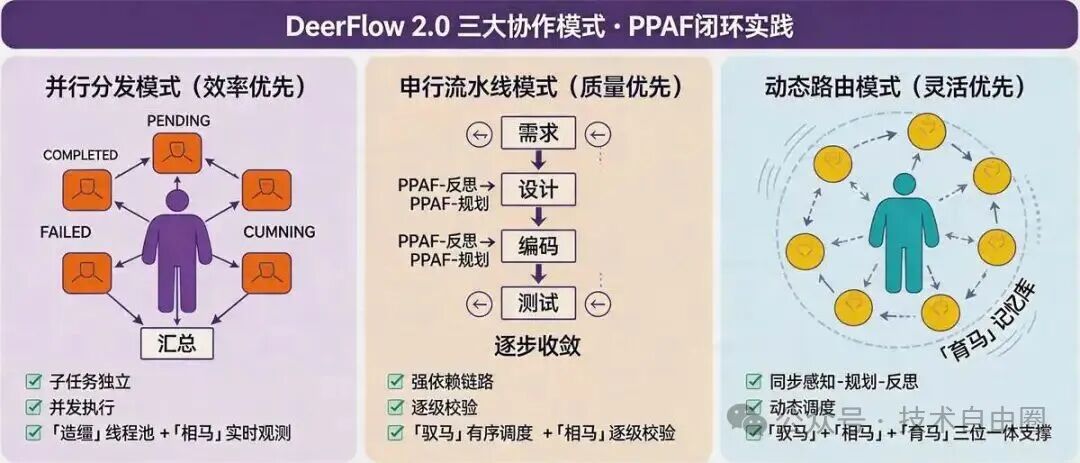
基于 PPAF 闭环逻辑与“驭马”工程的调度能力,DeerFlow 2.0 内置三种典型协作模式,分别适配不同任务特性,实现效率、质量与灵活性的平衡,每种模式均对应完整的 PPAF 闭环
尼恩提示:原文1w字以上, 超过平台限制, 此处省略 1000字,具体请参考 免费pdf。
完整版本,请参考 尼恩 免费百度网盘 免费pdf ,点赞收藏本文后,找尼恩获取
DeerFlow 什么时候必须用 Sub-Agent ?

当任务无法通过 Lead Agent 单独完成 PPAF 闭环,或单独完成会导致闭环断裂、安全风险、效率低下时,必须启用 Sub-Agent。
本质是通过 Sub-Agent 强化“行动”环节的专项能力,同时依托“造、驭、相、育”工程化体系,解决 Lead Agent 单独执行的痛点
尼恩提示:原文1w字以上, 超过平台限制, 此处省略 1000字,具体请参考 免费pdf。
完整版本,请参考 尼恩 免费百度网盘 免费pdf ,点赞收藏本文后,找尼恩获取
DeerFlow 什么时候不用 Sub-Agent?

当任务可通过 Lead Agent 单独完成完整 PPAF 闭环,且启用 Sub-Agent 会增加工程复杂度、降低效率、浪费资源时,不建议启用。
核心是避免“过度设计”,确保 PPAF 闭环的简洁高效,同时降低“造、驭、相、育”工程化体系的不必要开销,具体场景如下:
1. 简单任务(≤2 步、<30 秒)
典型场景: 天气查询、短文本问答、翻译、简单信息查询;
原因:
- 子代理创建 / 销毁 / 通信开销 > 执行收益,启用 Sub-Agent 会导致 PPAF 闭环冗余(额外增加调度、通信环节),降低执行效率;
- 架构冗余、效率降低,无需动用“驭马”“造缰”等工程化能力,Lead Agent 可单独完成“感知→规划→行动→反思”全闭环,且执行高效。
2. 直接问答、无工具调用
典型场景: 常识问答、概念解释、简短建议;
原因:Lead 可直接通过 LLM 完成“感知→规划→行动→反思”全闭环,无需分解调度,启用 Sub-Agent 属于多余环节,同时增加“造缰”工程的接口调用开销,无实际价值。
3. 强实时、低延迟(<1 秒)
典型场景: 即时对话、流式响应、高频交互;
原因:子代理调度 + 执行延迟 > 需求阈值,会导致 PPAF 闭环的“行动”环节延迟,影响用户体验;Lead Agent 单独执行可减少调度延迟,确保“感知→行动”的快速响应,满足实时需求。
4. 资源极受限环境(低内存 / 低 Token 限额)
典型场景: 多 Agent 并发占用更多内存 / Token,成本翻倍,且“造、驭、相、育”工程化体系的运行也需要一定资源支撑,在资源受限场景下,会导致 PPAF 闭环卡顿甚至崩溃;Lead Agent 单独执行可最小化资源占用,确保闭环正常运行。
5. 任务高度一体化、不可拆分
典型场景: 单句创作、简短代码片段、单一函数调用;
原因:无法拆解为独立子任务,拆分反而破坏逻辑完整性,导致 PPAF 闭环的“规划”环节不合理、“行动”环节碎片化;Lead Agent 单独执行可确保任务逻辑的连贯性,完成完整闭环,无需额外调度 Sub-Agent。
DeerFlow 快速决策表 :快速判断什么时候用 Sub-Agent?
| 判断维度 |
用 Sub-Agent(贴合PPAF/工程化需求) |
不用 Sub-Agent(贴合PPAF/工程化需求) |
| 步骤数 |
≥3 步、多阶段、长链路,需拆分实现完整PPAF闭环 |
≤2 步、单次完成,Lead可单独完成PPAF闭环 |
| 执行时长 |
>1 分钟、后台运行,需“相马”工程观测,“驭马”工程调度 |
<30 秒、即时返回,Lead单独执行无延迟,无需额外调度 |
| 工具 / 技能 |
专用工具、高危操作、多技能,需“造缰”工程隔离,专项行动支撑 |
无工具、纯生成、通用能力,Lead可单独完成“行动”环节 |
| 安全要求 |
沙箱、权限隔离、高危操作,需“造缰”工程边界约束,“相马”工程审计 |
无敏感操作、只读 / 无执行,无需安全隔离,Lead单独执行无风险 |
| 上下文 |
>10 轮、长记忆、需压缩,需“育马”工程记忆体系支撑,避免闭环断裂 |
≤5 轮、短对话、无膨胀,Lead可单独管理上下文,闭环高效 |
| 并发 / 异步 |
多任务、批量、后台执行,需“驭马”工程并发调度,“造缰”工程资源隔离 |
单任务、同步、即时响应,Lead单独执行可满足需求,无需并发调度 |
| 可观测性 |
生产级、审计、调试、可恢复,需“相马”工程观测,“育马”工程迭代 |
原型、测试、非关键场景,无需复杂观测与迭代,Lead单独执行即可 |
| 复杂度 |
高、易混乱、需模块化,需拆分实现PPAF闭环,依托工程化体系管控 |
低、清晰、无分支,Lead可单独完成PPAF闭环,无需模块化拆分 |
四、DeerFlow 源码介绍(结合 PPAF与REPL容器逻辑)

DeerFlow 源码中 Lead Agent 承担 Read、Eval、Print、Loop 管控职责,Sub-Agent 承担 Action 执行职责,同时融入“造、驭、相、育”工程化细节(配置加载、权限控制、状态监控、结果反馈)。
尼恩提示:原文1w字以上, 超过平台限制, 此处省略 1000字,具体请参考 免费pdf。
完整版本,请参考 尼恩 免费百度网盘 免费pdf ,点赞收藏本文后,找尼恩获取
五、总结(结合PPAF与工程化体系,提炼核心价值)
DeerFlow 2.0 主从代理架构的核心,是将 PPAF 智能体执行闭环模型与“造、驭、相、育”工程化支撑体系深度融合,实现智能协作的“决策可控、执行高效、安全可靠、可迭代进化”,具体可总结为:
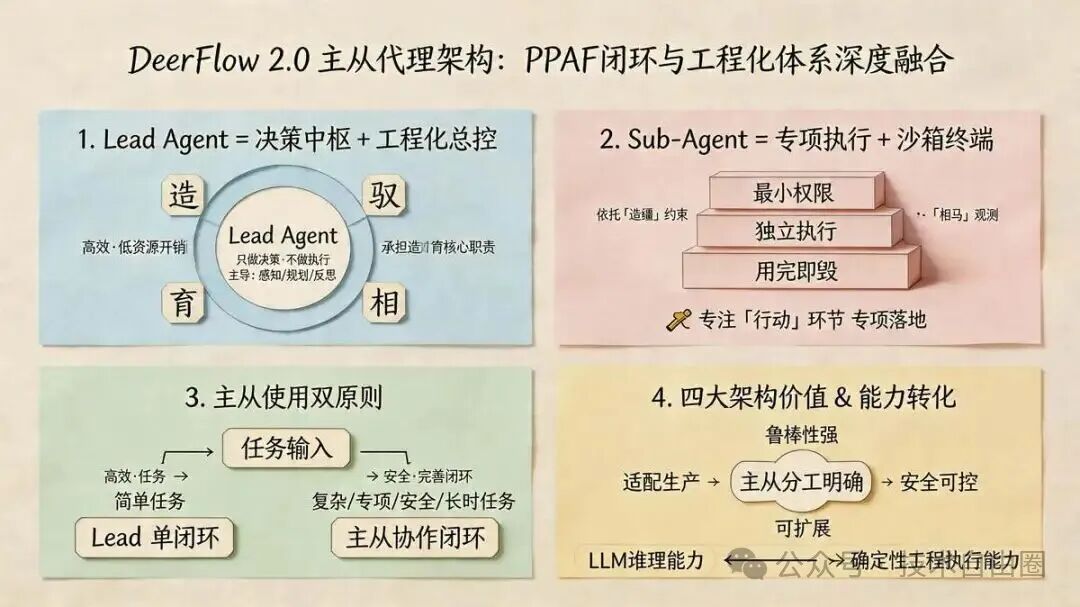
- Lead Agent = 大脑 + 总指挥 + PPAF 闭环中枢 + REPL 容器管控:只做决策、不做执行,主导“感知、规划、反思”三大环节,同时承担“造、驭、相、育”四步工程化支撑的核心职责,确保全局可控、闭环完整;
- Sub-Agent = 专项工人 + 沙箱隔离 + PPAF 行动终端:最小权限、独立执行、用完即毁,专注于“行动”环节的专项落地,依托“造缰”工程的边界约束与“相马”工程的观测能力,确保执行安全、精准;
- 使用原则:简单任务直接走 Lead,通过 Lead 单独完成 PPAF 闭环,最大化效率、最小化资源开销;复杂 / 专项 / 安全 / 长时任务必须上 Sub-Agent,通过主从协作完善 PPAF 闭环,依托工程化体系解决单一 Agent 执行的痛点;
- 架构价值:主从分工明确,完美契合 PPAF 闭环与“造、驭、相、育”工程化体系,使智能体协作具备鲁棒性强、安全可控、可扩展、适配生产的特点,同时实现 Agent 能力的持续迭代进化,真正将 LLM 的推理能力转化为确定性的工程执行能力。
在云栈社区,我们持续追踪此类前沿的 System Design 范式,探讨如何将抽象的 AI 理论落地为稳定、可演进的工程架构。
 发表于 2026-4-24 20:24:27
|
查看: 186|
回复: 0
发表于 2026-4-24 20:24:27
|
查看: 186|
回复: 0
