一款既柔软又轻便、无需外接笨重设备的人工肌肉来了!它的直径仅有 2mm,却能举起自身重量 200 倍的物体。更令人惊喜的是,其功率密度已接近真实生物肌肉的水平。
近日,麻省理工学院与意大利巴里理工大学联合团队在 Science Robotics 上发表了一项关于电流体纤维人工肌肉(EFM,Electrofluidic fiber muscles)的研究。他们在直径仅 2mm 的密封液体软管中嵌入微型电流体动力学(EHD)泵,通电后这根纤维便能像生物肌肉一样收缩发力。
结果令人惊叹:这束纤维可举起 4kg 的重物,功率密度达到 50 瓦每千克,收缩应变达 20%。它能在 0.3 秒内将一个小球弹射出去,同时还能温柔地与人握手。
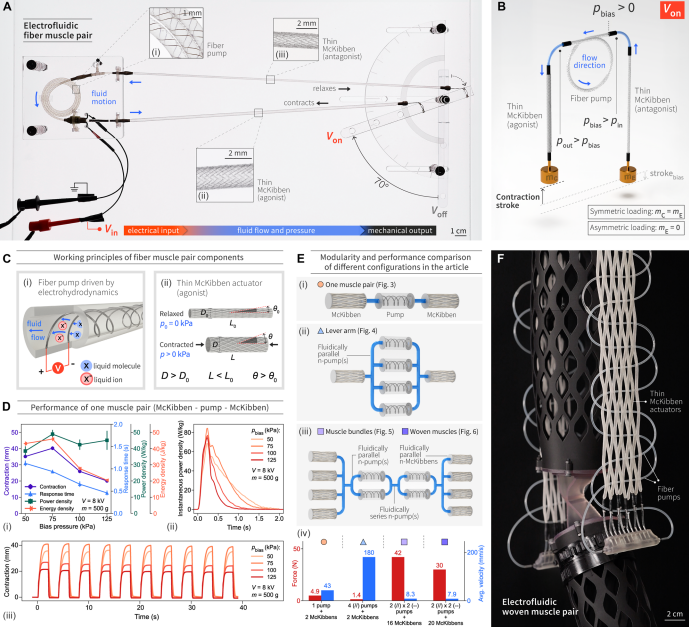
图 | 具有可调架构和性能的 EFM(来源:Science Robotics)
这项突破的关键在于解决了机器人领域的一大挑战:将泵塞进纤维内部,构建一个闭环驱动系统。新的驱动器不仅静音、强劲、对人体友好,而且彻底摆脱了以往限制软体机器人量产的外部液压设备。它有望应用于可穿戴辅助设备、柔性外骨骼、人机协作机器人以及软体机器人等场景。
长期以来,传统机器人驱动系统很难集成到机器人和假肢领域,核心原因在于它们往往离不开电机、外部泵或其他笨重的支撑硬件。工程师们一直在寻找能与生物肌肉力量相当、响应快速、可扩展且易于控制的仿生材料。
这项研究提供了一个全新的思路:直接将泵集成到纤维内部。EFM 在多个维度上逼近真实肌肉,且具有足够的柔韧性,能更好地与人体连接,运行起来也悄无声息。更重要的是,这些纤维可以组合成不同的形状,以适配特定任务。
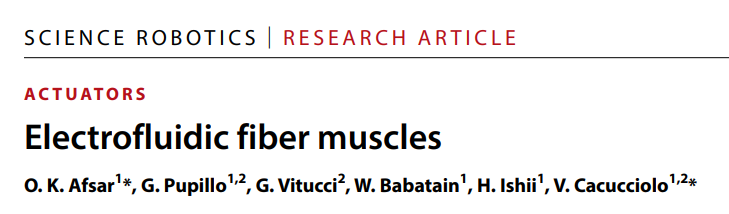
图 | 相关论文(来源:Science Robotics)
这套新系统的核心在于融合了两种已有技术:一种是流体驱动——薄型 McKibben 执行器,另一种是基于 EHD 的微型固态泵,可在密封的流体腔室内产生压力,无需移动部件或外部流体供应。
虽然技术路线看似简单,但将这两个动力学特性不同的技术结合起来,并不容易。研究人员发现,电压达到约 4 千伏时,泵很容易崩溃。于是他们设计了一个巧妙方案:在封闭系统中特意注入过量的液体,并提前为整个系统施加约 75 千帕的偏置压力。
这样做的目的是让两根对抗肌同时处于微绷紧状态,不仅能防止因入口压力过低产生气泡,还能将耐受电压从 4 千伏提升到超过 8 千伏。在同样负载 2 牛顿力的条件下,施加偏置压力后,人工肌肉的收缩幅度从 2% 提升至 14%,效果显著。
该系统的另一创新之处在于模块化设计。电驱动和液压可以像搭建乐高积木那样自由组合,使系统在设计与控制上更加灵活。例如,可通过并联多个泵来增大液体流量,从而提升速度。

图 | 编织肌肉对驱动机械臂(来源:麻省理工学院)
研究团队通过并联 4 个泵驱动一对肌肉,实现了每秒 180mm 的收缩速度,完成一次动作仅需 0.13 秒。这样的性能足以在 0.3 秒内通过杠杆臂将乒乓球弹射到 24 厘米的高度。
再比如,通过并联多根肌肉纤维可以获得更大的力量。研究人员将 8 根 EFM 绑在一起,每侧的两个泵并联工作提升流量,两侧的肌肉束串联形成闭环回路。结果显示,总重量仅 22 克的这一束人工肌肉,提起 4kg 的重物,行程达 30mm,并在 1000 次循环测试中保持性能稳定。
此外,研究团队还展示了 EFM 在可穿戴设备上的应用潜力。他们将纤维织成一块 40cm 长、6cm 宽的“肌肉织物”,用作机械臂的肱二头肌和肱三头肌。由于材料柔软可折叠扭曲,机械臂在 EFM 驱动下实现了 40 多度的弯曲。有趣的是,当人类与它握手时,它可以顺从地被推开——这种反向可驱动性正是传统电机难以实现的。

图 | 研究人员展示了几种用于不同任务的肌肉配置:一种快速发射物体的杠杆;一种举起 4kg 重物的纤维束;以及一对驱动机械臂弯曲并保持高柔韧性,作为肱二头肌和肱三头肌与人握手(来源:麻省理工学院)
尽管 EFM 表现出了令人振奋的性能优势,但它还不是一个完美的解决方案。例如,它的能量转化效率不高,仍需高压驱动才能工作,在电源管理方面还有改进空间。另外,研究中所用的氢氟醚液体是一种特殊的氟化液,存在供应限制和潜在的环境影响。研究人员也在探索使用非氟化液体实现类似效果的可能性。
目前,大多数机器人仍以电动伺服电机为主,而电机本身存在局限——尤其是人形机器人领域,其圆柱形态只能安装在关节处,导致要想获得更大力量,电机重量必须增加,整个机器人的质量集中在几个关键点上。相比之下,纤维状的人工肌肉能够更紧密地封装在机器人或外骨骼内部,并均匀分布在结构中。
这项工作的意义不仅仅是突破某几个性能指标——比如提重、柔韧性或速度。更重要的是,它为机器人执行器提供了一条不同于传统伺服电机的新路径。这种纤维形态的人工肌肉能够像真正的肌肉一样分布在机器人全身,即便其中几根出现问题,也不影响整体工作。摆脱刚性躯壳的起点,或许就藏在那根 2mm 粗的软管中。
对于这项突破感兴趣的朋友,欢迎前往 云栈社区 参与技术讨论。
参考资料:
https://www.science.org/doi/10.1126/scirobotics.ady6438
https://www.media.mit.edu/articles/a-new-type-of-electrically-driven-artificial-muscle-fiber/
 发表于 2026-4-27 00:57:55
|
查看: 324|
回复: 0
发表于 2026-4-27 00:57:55
|
查看: 324|
回复: 0
