论文链接:https://www.science.org/doi/10.1126/science.adr3521
在软体机器人、触觉传感和人造假肢等领域,开发能够高效将电能转化为机械能的人工肌肉一直是一项重大挑战。传统介电弹性体材料在低驱动电场下的输出性能,长期受限于其有限的机电灵敏度。
2025年12月4日,上海交通大学朱向阳教授、谷国迎教授联合江西科技师范大学卢宝阳教授在 Science 上在线发表了题为 “Semiseparated biphasic bicontinuous dielectric elastomer for high-performance artificial muscle” 的研究论文。上海交通大学机械与动力工程学院的博士研究生石笑天和邹江副教授为论文共同第一作者。

研究团队提出了一种“异交联诱导相分离”策略,研制出具有半分离双相贯通结构的介电弹性体(SBE),将机电灵敏度提升至 $360 \text{ MPa}^{-1}$,为高性能人工肌肉的发展提供了新途径。
该策略利用了两种硅橡胶不同的交联机制,通过其异交联动力学的差异,引导两相在微米尺度自发组装。其中高介电常数的介电(D)相通过主链交联形成贯穿网络,而低杨氏模量的机械(M)相通过侧链交联构成力学骨架,形成边界融合、相互贯通的双相结构。这种微观结构既保持了材料的低杨氏模量,同时提高了其介电常数和击穿电场。
实验表明,仅含 10% D 相的 SBE 材料,其杨氏模量约为 10 kPa,相对介电常数为 3.6,实现了高的机电灵敏度。基于此材料制备的人工肌肉,在无需预拉伸的情况下,在 $35 \text{ V/μm}$ 的电场下实现了 90% 的面积应变。
基于此,研究团队研制了高性能剪切型人工肌肉。实验结果表明,在较低电场驱动下,不同配比的人工肌肉均展现出优异的驱动应变能力。譬如,无需预拉伸即可产生超过 50% 的线性应变,应变速率高达 $400\% \text{/s}$,能量密度达到 $375 \text{ J/kg}$ 等,充分展现了双相结构在提升人工肌肉综合性能方面的作用。
进一步,研究团队制备出堆叠式和卷绕式两种结构的人工肌肉。实验结果表明:堆叠式人工肌肉在高频下,实现了 $21.76 \text{ kPa}$ 的阻塞应力密度和 $2250 \text{ W/kg}$ 的功率密度。一个重 1.2 克的堆叠式人工肌肉能够在 300 克负载下往复运动,线性应变达 91%。
为展示其应用潜力,团队研发了由四个 SBE 人工肌肉驱动的仿人机械臂,具有 $119.3^\circ$ 的运动范围, $0.24 \text{ N·m}$ 的输出扭矩。此外,研制的多模态软体爬行机器人在 300 Hz 驱动频率下实现了 22 身长/秒的快速运动,通过调整前后肌肉的驱动相位即能实现前进、后退的切换,在弯曲管道和复杂胃模型等非结构化环境中穿行。
这项研究通过材料设计、器件开发与软体机器人应用,展示了介电弹性体人工肌肉在机电灵敏度、输出力、功率密度和使用寿命等方面的新性能,为下一代高性能、电驱动软体机器人研发提供了新的技术路径。
——以上来自于Science作者解读
背景介绍
介电弹性体人工肌肉作为电驱动软体致动器的核心材料,在软体机器人、可穿戴设备、触觉交互和仿生假肢等领域具有广阔前景。其工作原理基于麦克斯韦应力:在电场作用下,介电弹性体薄膜厚度压缩、面积扩张,从而将电能转化为机械功。
然而,其实际应用长期受限于低机电灵敏度,即在低驱动电场下难以实现大变形与高输出性能。机电灵敏度由材料的相对介电常数与杨氏模量共同决定,提升该参数需兼顾高介电常数与低模量。传统策略如添加高介电填料、化学改性或网络结构优化虽有所进展,但机电灵敏度普遍不超过 $110 \text{ MPa}^{-1}$,且往往牺牲击穿强度、响应速度或循环寿命。另一方面,单纯降低杨氏模量易导致介电性能下降和机械稳定性不足。因此,如何在单一材料体系中协同优化介电性、柔软性与耐久性,成为突破软体驱动器性能瓶颈的关键科学挑战。
创新成果
基于此,研究团队提出了一种异质交联诱导相分离策略,成功构建了半分离型双相双连续介电弹性体(SBE)。该材料巧妙整合两种商用硅橡胶:高介电常数的Sylgard 170通过主链高密度交联形成连续介电相(D-Phase),而超软的Elastosil P7676则通过侧链低密度交联构建连续力学相(M-Phase)。两相因PDMS链互穿而边界模糊但功能协同,既保留了高介电响应,又实现了极低模量(~8 kPa)。所得SBE材料展现出高达 $360 \text{ MPa}^{-1}$ 的机电灵敏度,在低电场下兼具高能量密度与超长寿命,并成功应用于大行程机械臂和多模态无缆软体机器人,为高性能软体驱动器提供了新范式。
图文解读
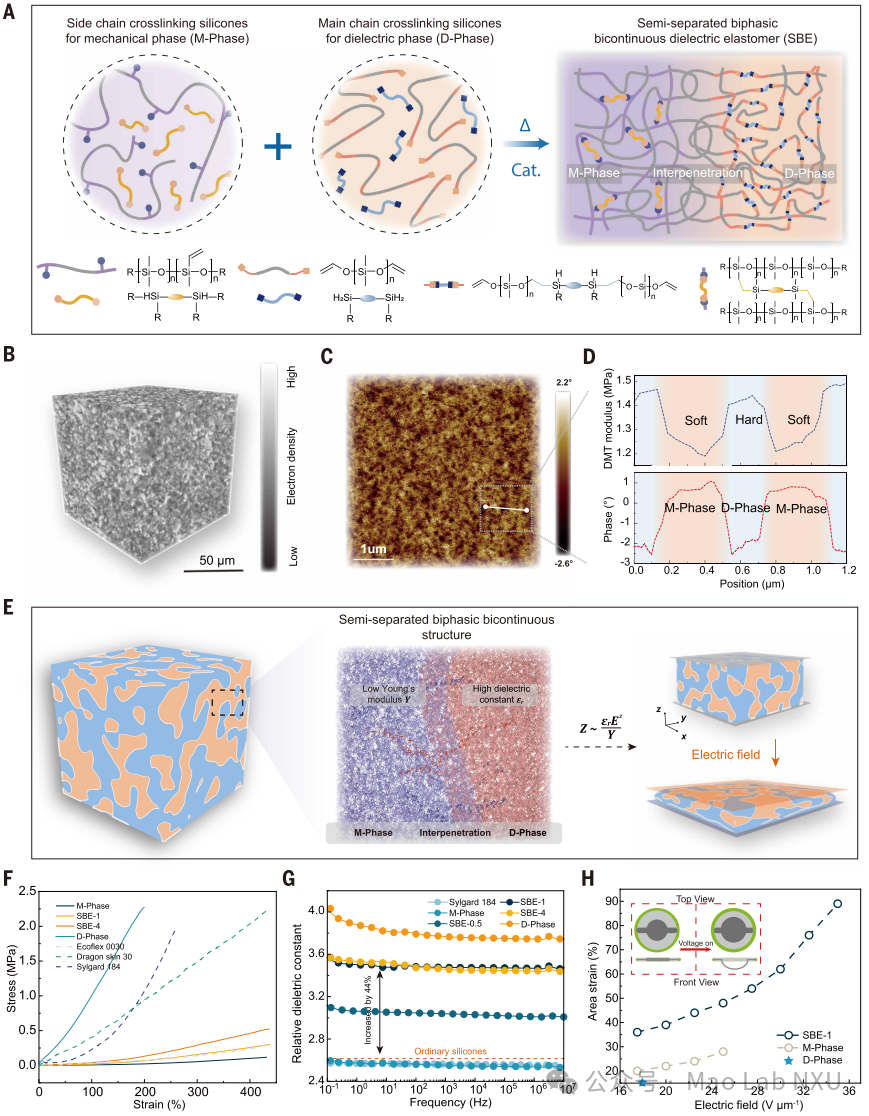
图1. 异交联诱导的相分离策略和材料性质
(A)侧链交联型和主链交联型的相分离策略,侧链交联预聚物在高温和催化剂作用下首先发生化学交联,形成网状结构的M-Phase。同时,未连接的主链交联预聚物迁移和聚集,随后发生化学交联沉淀D-Phase,填充弹性相形成的拓扑结构。(B) XCT和(C) AFM图像显示SBE的双相贯通结构。(D)两相的相角和DMT模量有明显差异。(E)SBE包括M-Phase和D-Phase。模糊的相边界(中)产生介电屏障,导致击穿电场增强(右)。(F) SBEs和其他常用有机硅弹性体的应力应变曲线和(G)介电光谱。(H) SBE-1具有优异的机电变形性能,在 $35 \text{ V μm}^{-1}$ 条件下无需预拉伸即可达到90%的面应变,并表现出较高的击穿强度。
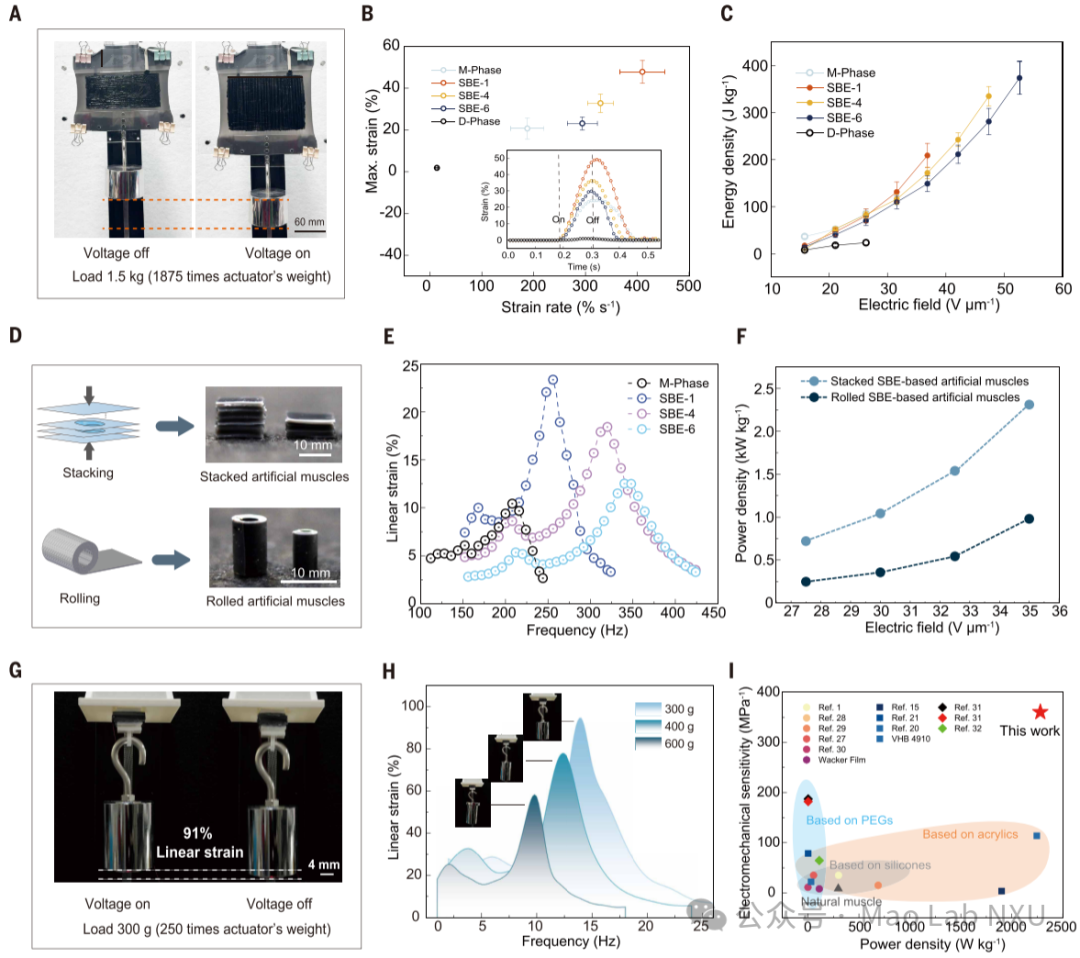
图 2. 基于 SBE 的人造肌肉的性能表现
(A)纯剪切型基于 SBE 的人造肌肉在 1.5 Kg负载下表现出相当大的线性应变。(B)纯剪切型基于SBE 的人造肌肉的最大应变和应变率,图中插图展示了单次驱动周期内的应变变化情况。(C)在不同电场下基于纯剪切型 SBE 的人造肌肉的能量密度特性。(D)人造肌肉的制造工艺示意图。(E)由不同比例的 SBE 制成的基于 SBE 的人造肌肉的线性应变-频率曲线。(F)堆叠和卷曲人造肌肉的功率密度。由于驱动方向不同,堆叠人造肌肉表现出更高的性能。(G)高度为 4.5 mm的堆叠型基于 SBE 的人造肌肉可将 300 g(其重量的 250 倍)的负载提升 4.1 mm(线性应变 91%)。(H)带有悬吊负载的堆叠型基于 SBE 的人造肌肉的线性应变-频率曲线。(I)将基于 SBE 的人工肌肉与文献中报道的其他基于电介质弹性体的人工肌肉在机电灵敏度和功率密度方面的数据进行比较。
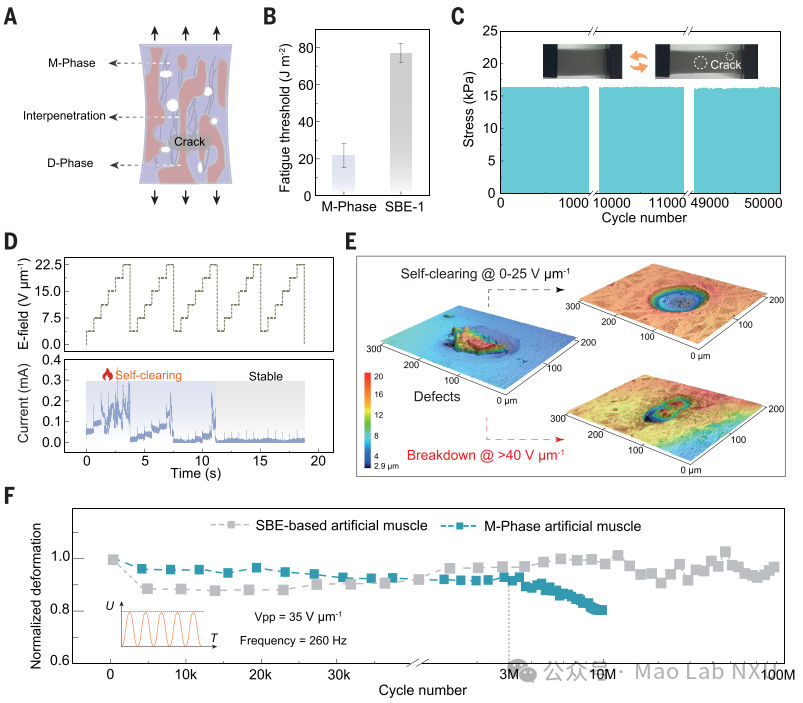
图 3. 基于 SBE 的人工肌肉的长期稳定性和鲁棒性
(A)在 SBE 上制造缺口和针孔以测试其抗疲劳性和长期稳定性。(B)M 相和 SBE-1 的疲劳阈值比较。SBE-1 的疲劳阈值高出三倍,这归因于双相之间界面强度的增强。(C)在存在缺口和针孔的条件下,SBE-1 在超过 50000 次拉伸循环后没有出现明显的应力损失。(D)通过阶梯电压实现自清除,电流为零,表示清除完成。(E)SBE 基人工肌肉在自清除和破坏性电击穿后的共聚焦显微镜图像,表明自清除可消除缺陷形成清晰的孔隙,而过高的电场会导致碳化物积累从而造成短路。(F)在 $35 \text{ V μm}^{-1}$ 电场下 SBE-1 和 M 相人工肌肉的循环驱动测试。Vpp,峰峰值电压;U,驱动电压;T,时间。
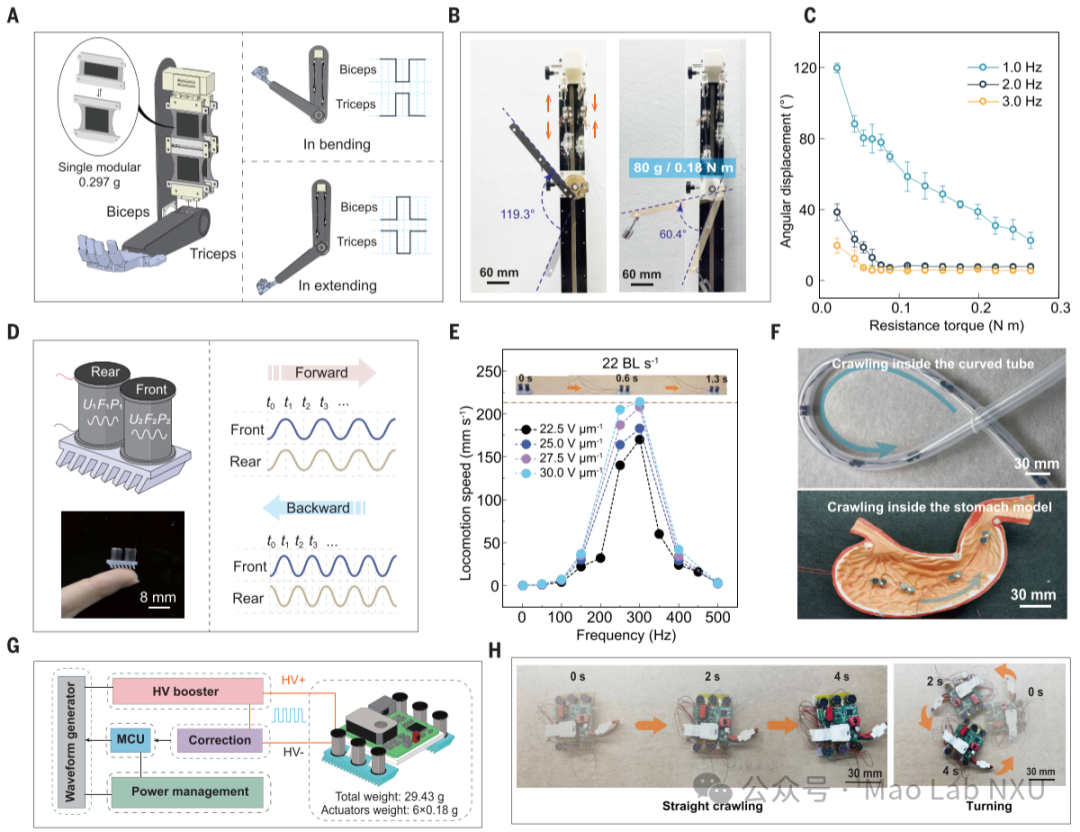
图4. 基于 SBE 的人造肌肉的应用
(A)具有四根纯剪切 SBE 人造肌肉的人形机器人手臂的设计及工作原理。(B)该机器人手臂具有较大的行程(119.3°)和较高的负载能力。(C)不同扭矩和频率下的角度位移。(D)超高速软爬行机器人的设计及步态实现。通过改变驱动频率以及前后人造肌肉之间的相位差来实现运动方向和速度的调整。(E)电场和驱动频率对机器人速度的影响,最大速度可达 $22 \text{ BL s}^{-1}$。(F)机器人在弯曲管道和胃模型中爬行。(G)红外控制的微型高频高压驱动电路系统以及无绳机器人设计。HV 增压器;高压增压器;MCU,微控制器单元。(H)直线爬行和可控转弯的演示。
展望
综上,受限于材料本征性能瓶颈,软体驱动器难以在低电压、高输出、长寿命之间取得平衡。本研究提出了一种异质交联诱导相分离策略,成功构建了SBE。该设计巧妙地将高介电常数相(D-Phase)与超低模量力学相(M-Phase)在分子尺度上协同集成,突破了传统介电弹性体中“高介电常数”与“低杨氏模量”难以兼得的材料矛盾。由此获得的SBE人工肌肉在低驱动电场下实现了高达 $360 \text{ MPa}^{-1}$ 的机电灵敏度,远超现有材料(通常小于 $110 \text{ MPa}^{-1}$),并同步展现出高能量密度、快速响应、高效率和超长循环寿命等综合优势。基于此,研究人员展示了具备高能量密度和无缆运行能力的机械臂及多模态软体爬行机器人,验证了其实际应用潜力。本研究为下一代兼具优异的输出性能、超长寿命和出色的结构完整性的电驱动软体机器人奠定了基础。
该研究得到了国家自然科学基金、国家重点研发计划等项目的资助。
论文链接:
https://www.science.org/doi/10.1126/science.adr3521
延伸阅读:同一团队在 Science Advances 的最新工作

软体机器人要实现更高程度的自主性与环境适应能力,需要将驱动与传感单元无缝集成。这对电子器件提出了贴合、可拉伸且空间分布式的要求,而受限于复杂的几何、多材料集成以及刚性电子与柔性本体之间的机电失配,传统设计与制造方法难以满足这一需求。
上海交通大学谷国迎/朱向阳教授/王冬长聘副教授团队提出了一种面向自主软体机器人的设计与制造框架,实现了驱动与传感的嵌入式集成。团队开发了一种集成数字光处理(DLP)与直写墨水(DIW)的3D打印技术,可自动化制造内嵌且贴合的3D电子系统。为在大变形条件下同时保证电学与力学稳定性,团队提出了一种结构设计策略,引入晶格超材料、波浪形互连以及离散化印刷电路板(PCB)。
结合上述制造与设计方法,团队展示了具备多模态驱动、实时触觉传感、无线通信、触觉到视觉反馈以及自主避障能力的软体机器人。该方法为电子系统深度集成的自主软体机器人的发展奠定了基础,也预示着人工智能与实体机器系统更紧密的结合。
这项发表于 Science Advances 的研究,展示了从核心材料突破到系统集成创新的完整技术链条,为未来智能软体机器人的发展提供了重要参考。更多前沿技术动态与深度解读,欢迎关注云栈社区。
 发表于 2026-3-8 08:48:50
|
查看: 148|
回复: 0
发表于 2026-3-8 08:48:50
|
查看: 148|
回复: 0
