现代汽车已演变为一部拥有数百个电子控制单元(ECU)的复杂“轮上计算机”。这些ECU如同汽车的大脑,而遍布车身的传感器则是其感知世界的神经末梢。这些“神经信号”如何准确、可靠、实时地传递,直接决定了汽车的智能化水平和安全性能。
Source:https://www.actronics.co.uk/news/how-does-a-ecu-work-in-a-car
这背后是一系列精心设计、各司其职的通信协议在协同工作。本文将深入剖析这些主流通讯协议的原理、特点及其典型应用场景。
通讯协议选择的核心工程逻辑
从技术工程角度出发,为汽车传感器选择通信协议是一个多维度的综合决策过程,核心在于性能、成本、可靠性和系统复杂度之间取得最佳平衡。具体可分解为以下几个关键考量维度:
1. 数据量与传输速率
评估传感器产生的原始数据率,这通常由采样精度、频率及数据维度决定,可分为三种典型场景:
- 低速/小数据量:仅有几比特的状态量或采样频率低于100Hz、精度10-12位的标量物理量(如温度、压力),数据率通常在 < 10 kbps 量级。LIN协议或传统模拟信号适用于此场景。
- 中速/中等数据量:高速变化的动态信号,如发动机曲轴转角、多轴加速度信号,数据率在10kbps至1Mbps之间。CAN/CAN FD或SENT协议是更优选择。
- 高速/大数据量:连续的高速串行数据流,如图像传感器原始像素流、高分辨率雷达点云数据,数据率可达几十Mbps至数Gbps。此时必须考虑车载以太网及其配套技术。
2. 实时性与确定性
这一点关乎系统控制的时效保障和可预测性,是动力总成和安全关键系统的生命线(如发动机点火、安全气囊触发)。信号抖动必须被严格控制在微秒级,错过时限即意味着功能失效。这要求协议具备时间触发或极高优先级的仲裁机制,SENT和PSI5协议常被用于此类场景。
3. 可靠性与成本
需要评估应用场景对信号抗干扰能力的要求级别,同时必须考虑BOM成本预算。
4. 拓扑结构与布线复杂度
需要确定连接方式:点对点(单传感器对单ECU)?总线型(多节点共享总线)?还是星型/树型(以交换机为中心)或菊花链(节点串联)?
最终,协议的选择必须与整车电子电气架构的演进阶段相匹配。分布式架构依赖CAN/LIN网络;域集中架构需要以太网作为域间骨干网;中央计算架构则可能推动更多传感器通过高速链路直接接入中央计算机。
Source: https://www.altengt.com/communication_protocol.html
因此,实际工程决策流程通常是:首先根据传感器的功能安全等级和性能边界(数据率、延迟上限)定义需求;在整车EEA框架下,确定传感器所属的域及其连接目标;根据数据率、实时性要求和目标ECU接口资源,筛选候选协议;最终通过精细化比较,为每个传感器节点选择最合适的通信方式。
经典与基础协议:模拟与数字的基石
1. 模拟电压/脉冲信号
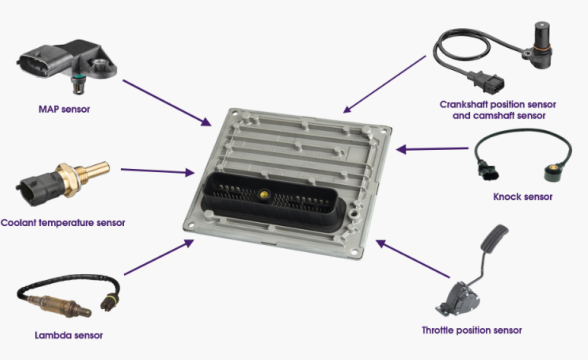
这是最直接的通信方式。传感器将被测量(如压力、位置)转换为一个线性电压(如0-5V)或频率/占空比可变的脉冲信号。接收端ECU的模数转换器(ADC)读取电压,或通过计数器测量频率,从而还原物理量。
Source:https://www.actronics.co.uk/news/how-does-a-ecu-work-in-a-car
这种方式电路简单、成本极低。但信号易受电磁干扰、长距离传输有衰减,且一根线只能传输一个信号,导致线束庞杂。典型应用包括老式节气门位置传感器(模拟电压)、磁电式曲轴位置传感器(正弦波)等。
2. LIN 协议
LIN是一种低速、单线、基于UART的串行通信协议。它采用主从架构,一个主节点控制总线并轮询多个从节点(传感器/执行器)。数据以报文帧形式传输,包含同步间隔、标识符、数据(最多8字节)和校验和。
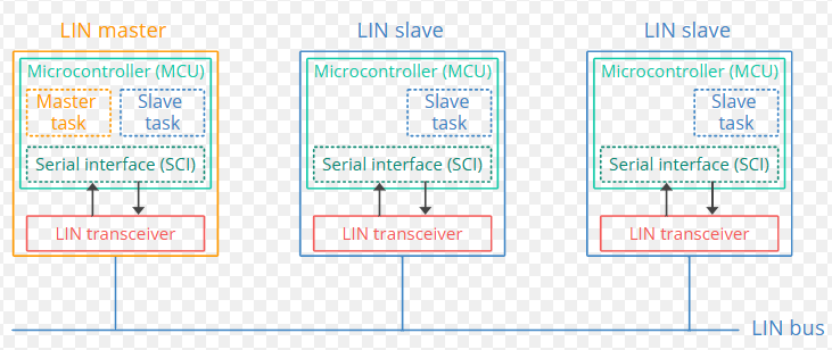
LIN总线成本极低(无需屏蔽线),速率最高20kbps,适用于对实时性要求不高的场景,常作为CAN总线的补充子网。典型传感器应用包括雨量/光照传感器、车门开关传感器等。
骨干网络协议:CAN/CAN FD
CAN协议是现代汽车的神经网络主干。它采用差分信号(CAN_H, CAN_L)传输,具有极强的共模干扰抑制能力。其核心是非破坏性基于优先级的仲裁机制:当多个节点同时发送时,标识符(ID)优先级高的报文赢得总线,其他节点自动退出发送,确保高优先级信息实时传递。理解这类底层通信机制,对于构建高可靠的分布式系统至关重要,相关的知识可以在网络/系统板块找到深入解析。
CAN FD在经典CAN基础上演进,通过提升位速率和扩展数据场(从8字节到64字节),实现了灵活数据速率,满足了日益增长的数据交换需求。
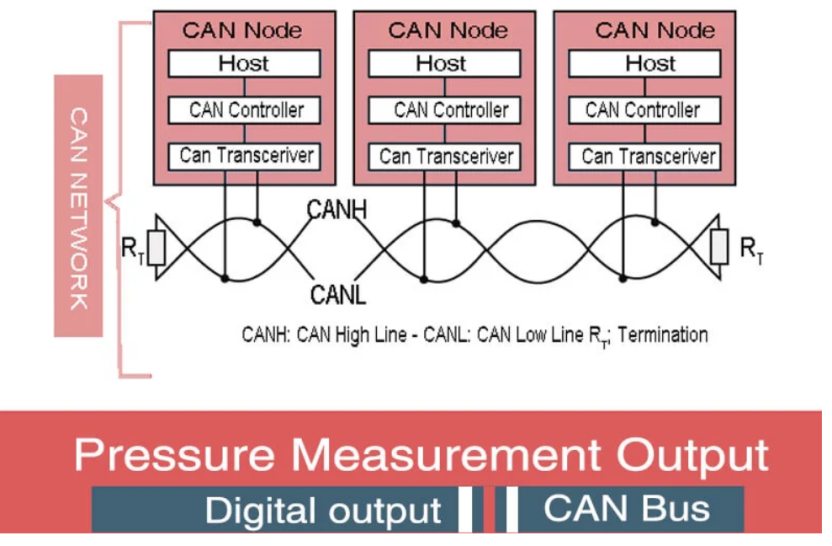
Source:https://www.eastsensor.com/blog/can-bus-pressure-sensor/
CAN/CAN FD协议的特点是多主、广播式通信、高可靠性、中等带宽(CAN FD可达5Mbps以上)。多数传感器并非直接挂在CAN上,而是由智能传感器模块或本地ECU采集后,通过CAN总线与其他ECU共享数据。典型应用包括发动机转速、冷却液温度、整车加速度(ESP系统)等数据。
专用传感器协议:为高精度与安全而生
1. SENT (Single Edge Nibble Transmission)
SENT是一种点对点的单向数字串行协议。它将数据编码为一个连续的脉冲链,每个“半字节”(4位数据)由两个下降沿之间的时间长度表示。一个完整的SENT帧通常包含状态/通信半字节、多个数据半字节和校验和,帧与帧之间有固定的同步脉冲。
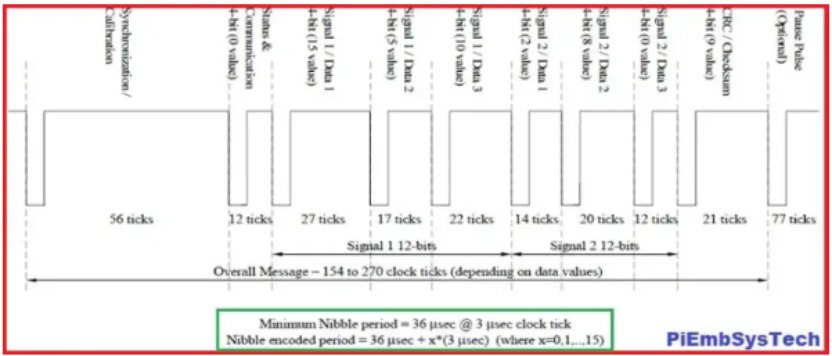
Source: https://piembsystech.com/sent-protocol/
SENT协议具备高分辨率(可达12位以上)、极低延迟、传输时间固定、抗干扰能力强(数字信号)的优点,仅需一根信号线。下图展示了SENT协议在传感器与ECU之间通信的典型硬件连接和信号传输原理:
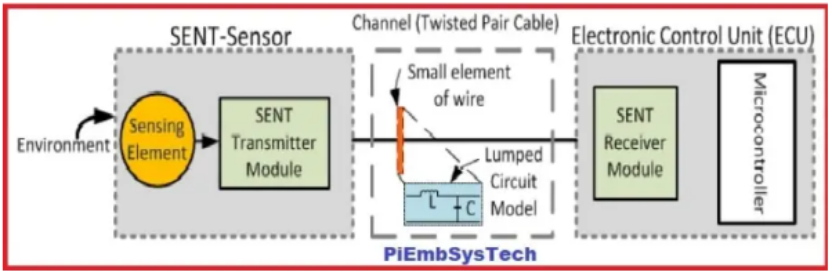
Source: https://piembsystech.com/sent-protocol/
如图所示,传感元件将物理量转换为电信号,SENT传输模块将其编码为时间脉冲,通过双绞线传输。ECU端的SENT接收模块解码脉冲,还原数据供微控制器使用。典型传感器应用包括涡轮增压压力传感器、高精度节气门位置传感器等。
2. PSI5 & DSI3
两者都是为安全关键传感器(特别是安全气囊系统)设计的双线制接口,实现了供电与通信在同一条线对上复用,并支持数据的同步、周期性传输。
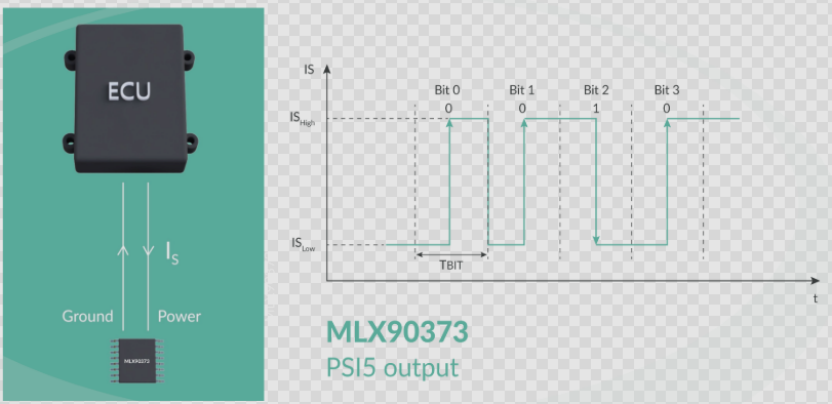
Source: https://www.melexis.com/en/product/mlx90373/triaxis-performance-rotary-linear-position-sensor-ic-psi-5
PSI5采用曼彻斯特编码,速率通常为125kbps;DSI3采用更复杂的命令-响应机制,支持总线型和菊花链拓扑。PSI5帧结构灵活可配置,一个完整帧长度可在13至33比特之间变化,其详细组成如下图所示:
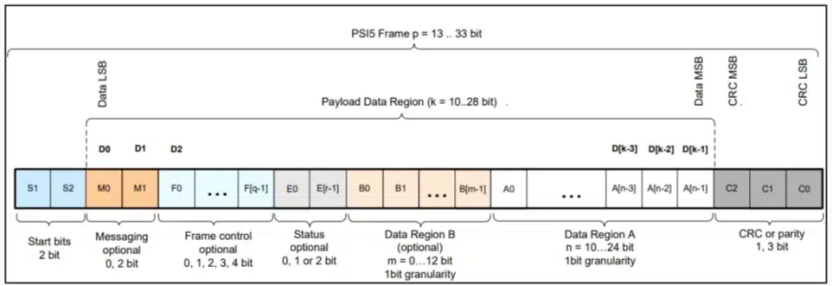
Source: https://www.picotech.com/library/knowledge-bases/oscilloscopes/psi5-serial-protocol-decoding
帧结构包括起始位、可选的消息位/帧控制位/状态位、必需的数据区A、可选的数据区B以及校验位。这种模块化设计在有限带宽内高效整合了命令、状态、数据与可靠性校验。典型传感器包括碰撞加速度传感器、侧翻角速度传感器等。
面向未来的高速协议:智能驾驶的“高速公路”
随着ADAS和自动驾驶的发展,摄像头、雷达、激光雷达产生的海量数据已超出传统协议的能力范围。
车载以太网借鉴了传统以太网技术,并针对汽车环境进行优化(如单对双绞线、更严苛的EMC要求)。它采用基于IP的包交换,实现了高速、灵活的点对点或交换机网络。AVB/TSN(时间敏感网络)通过精准时钟同步和流量调度,为音视频和控制数据提供低延迟的确定性传输,成为自动驾驶的基石。这种集中化、高性能的数据交换模式,正是现代云原生/IaaS理念在汽车领域的体现。
典型传感器数据传输路径:
- 摄像头:原始视频流数据量巨大。通常传感器通过MIPI CSI-2接口将数据传给本地图像信号处理器(ISP),处理后再通过串行器/解串器(如FPD-Link, GMSL)转换为车载以太网(如1000BASE-T1),传输给ADAS域控制器。
- 雷达/激光雷达:高分辨率4D成像雷达和激光雷达往往直接集成处理芯片,输出目标列表或压缩点云,通过千兆以太网传输。
MIPI CSI-2 是摄像头传感器与图像处理器之间芯片级互联的事实标准。它是一种高速、低功耗的差分串行接口,包含时钟通道和1-4条数据通道,数据以包的形式传输,每通道速率可达数Gbps。
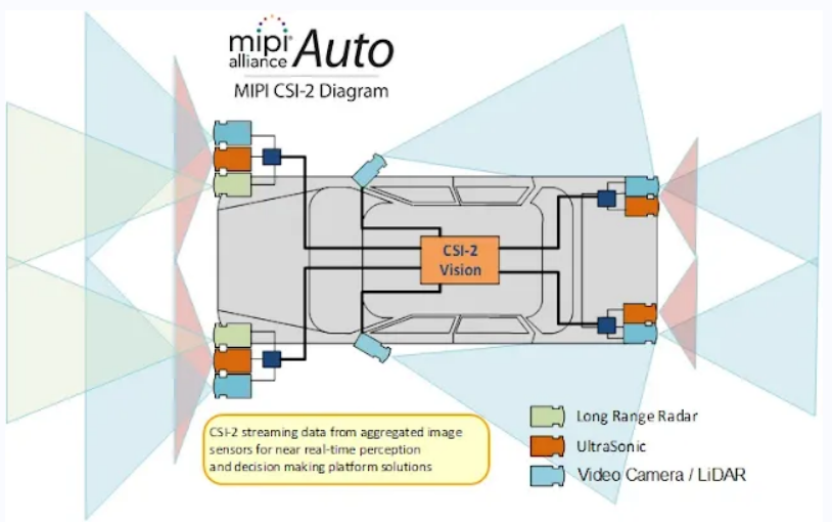
Source: https://blog.digitalelectronics.co.in/2025/06/lidar-and-radar-integration-with-csi-2.html?m=1
总结
汽车电子电气架构正从“分布式ECU+多总线”向“域集中/中央计算+高速主干网(以太网)”加速演进。未来,原始传感器数据将更多地通过高速、确定的通道(如以太网TSN)直接汇入强大的域控制器进行融合与决策。然而,由于成本、可靠性和继承性,多种协议将在未来很长一段时间内共存,形成一个高效、分层、融合的混合通信网络,持续驱动着汽车的智能化进程。
各协议关键特性对比如下:

 发表于 2025-12-24 08:56:52
|
查看: 283|
回复: 0
发表于 2025-12-24 08:56:52
|
查看: 283|
回复: 0
