首先感谢与非网的拆解分析报告,与某国产前大灯控制器一样,小米汽车前照灯控制模块同样使用了铝合金外壳,这主要用于为内部的Boost芯片、Buck芯片、MOSFET以及电感等发热元件进行散热。

本文在感谢私家芯探的拆解成果基础上,将进一步深度剖析其硬件设计,尝试构建其硬件框图和解析关键部分的设计原理。
电路板布局与叠层设计
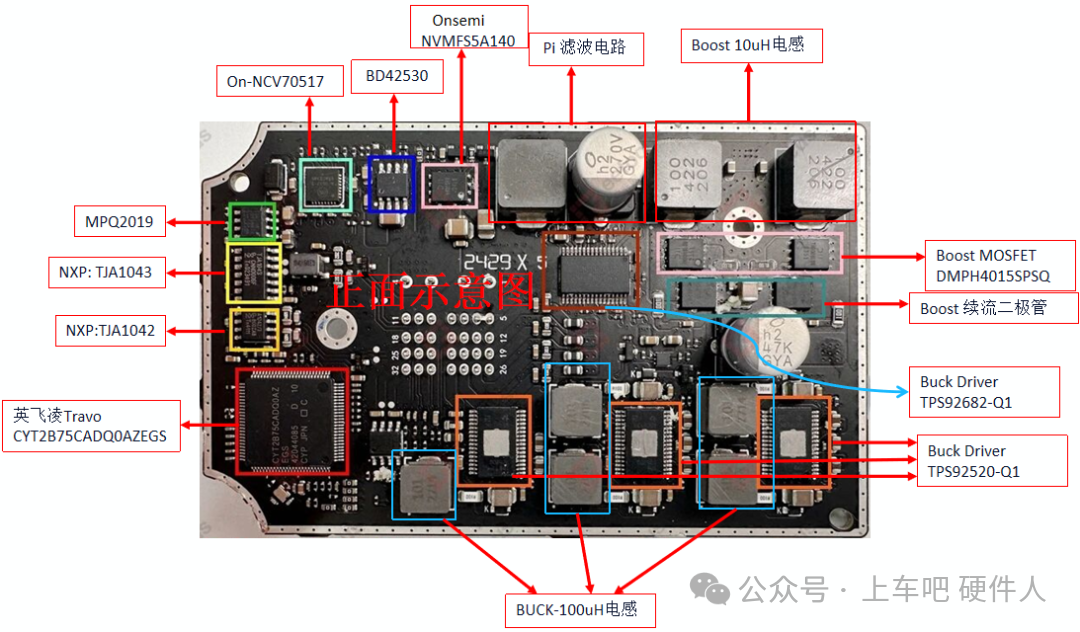
正面示意图:
反面示意图:
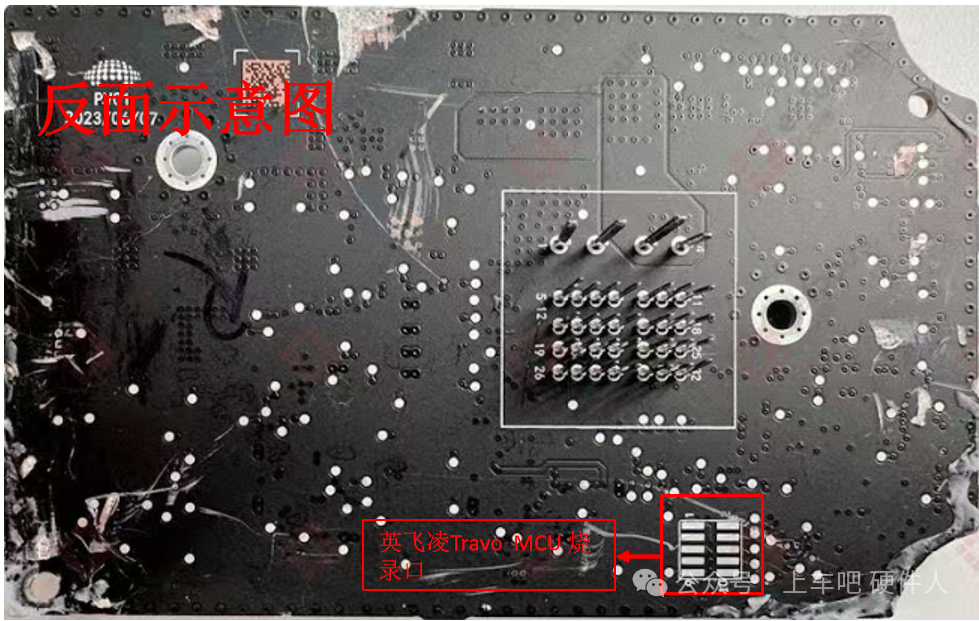
注:产品量产后,MCU的Debug口并未去除,这通常不符合汽车网络安全(Cybersecurity)的相关要求。
PCB 叠层结构:
该模块采用了4层板设计,PCB铜厚为1盎司。
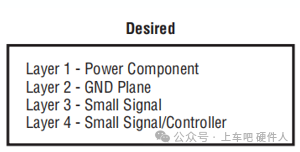
这种叠层设计的优点在于:
- 优化噪声与回流路径: 将接地层(GND Plane)放置在功率层之下,构建了高效的噪声吸收与最短的电流回流路径。
- 物理隔离干扰: 接地层同时充当了屏蔽层,将上层的敏感小信号与底层的功率噪声进行物理隔离,从根本上阻隔了干扰耦合。
PCB 电子元件布局:
Boost与Buck相关功率电路被集中布置在PCB正面。这种布局策略有助于缩减小信号和功率回路的关键环路面积,从而显著改善产品的电磁干扰(EMI)性能。
关于降压电路(Buck)的EMI改善策略,可以参考相关技术文章。
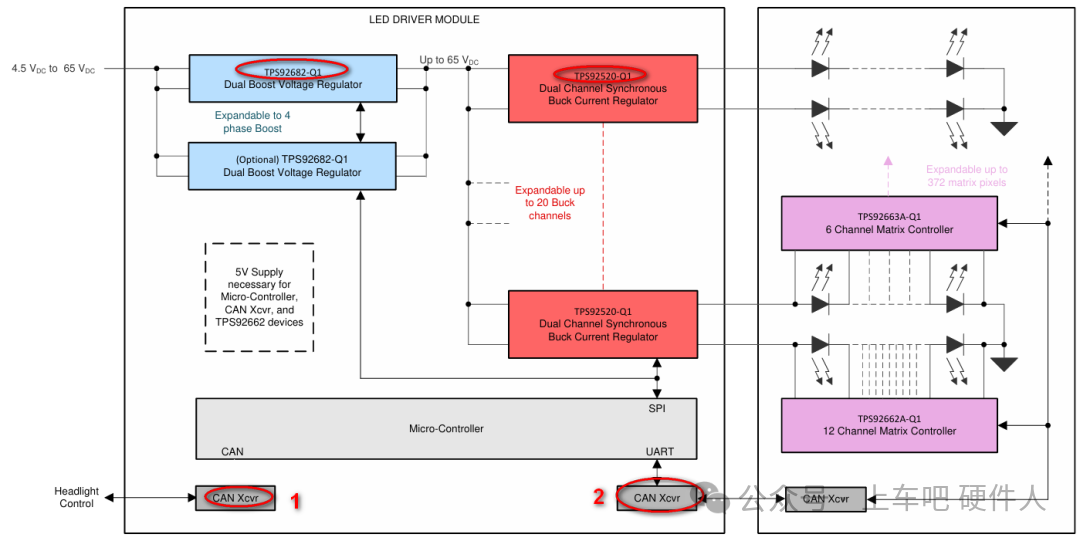
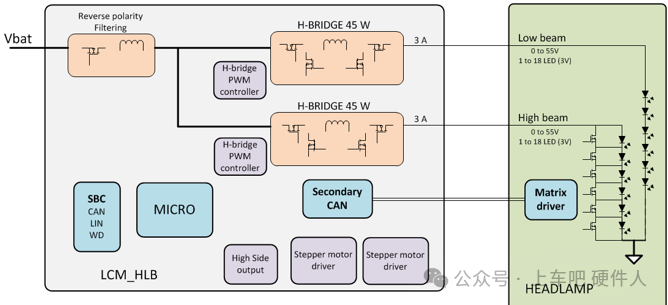
前大灯硬件电源架构
该模块的电源架构与恩智浦(NXP)典型的车灯产品方案类似。其核心是采用 Boost升压电路 输出一个恒定的高压(约50V),然后再利用多路 Buck降压电路 对每一串LED灯珠进行恒流控制,以此实现精准的灯光亮度调节。
关键芯片与电路深度解析
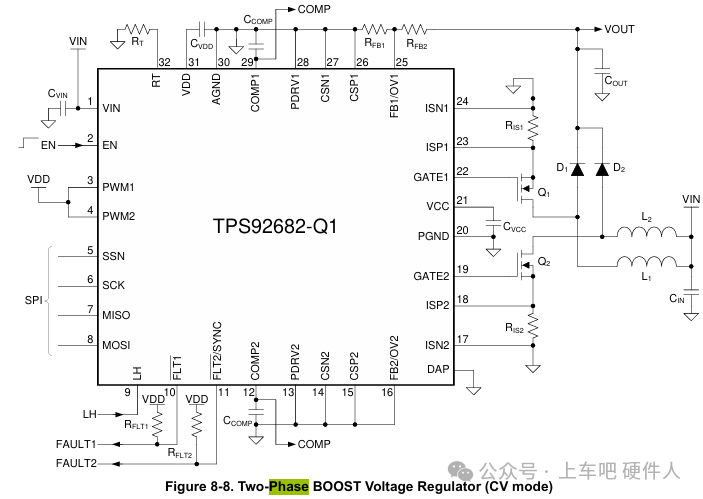
1. 2相 Boost 芯片 TPS92682-Q1
- 核心功能: 为后级的LED驱动电路提供稳定的高压电源(约45V)。该芯片集成了展频功能,通过智能扩展开关频率的频谱能量,能够显著降低传导和辐射EMI的峰值,从而简化滤波设计并提升系统电磁兼容性(EMC)的裕量。
- 架构与功率: 采用2相Boost交错并联架构,使得总输出功率可达100W,同时有助于减小输入电流纹波。
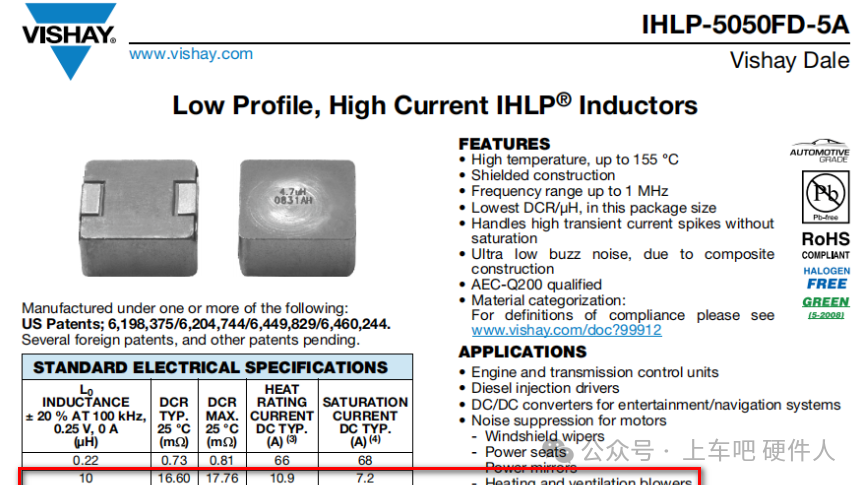
Boost电路电感选型:
采用了Vishay的一体成型电感,感值为10uH。一体成型电感具有屏蔽结构好、噪音低、能承受高瞬态电流等优点,有助于降低EMI峰值。
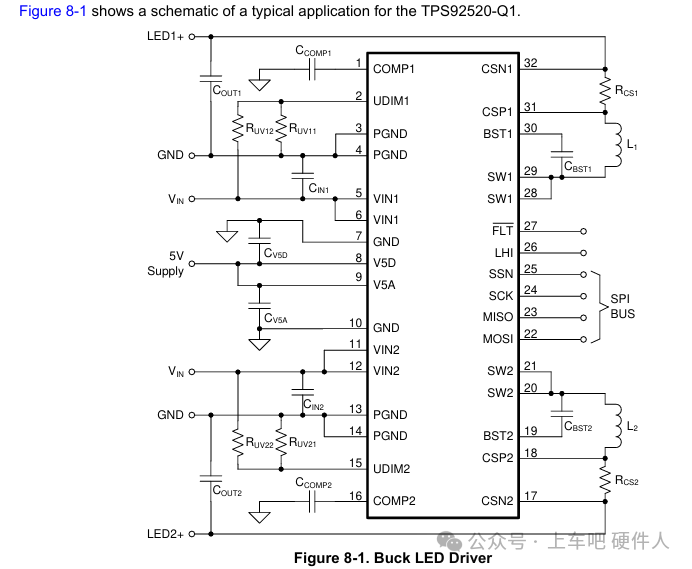
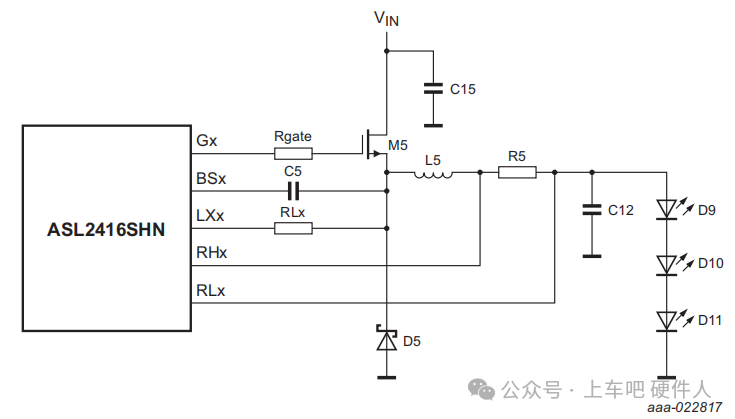
2. 降压恒流LED驱动器 TPS92520-Q1
- 核心优势: 这是一款集成了MOSFET和续流二极管的同步Buck恒流驱动器。与恩智浦的ASL2416等需要外部分立器件的方案相比,TPS92520-Q1极大地简化了设计,降低了BOM(物料清单)成本。
Buck电路电感选型:
Buck电路采用了乾坤(Cyntec)的一体成型电感,感值为100uH,同样是为了优化EMI性能。

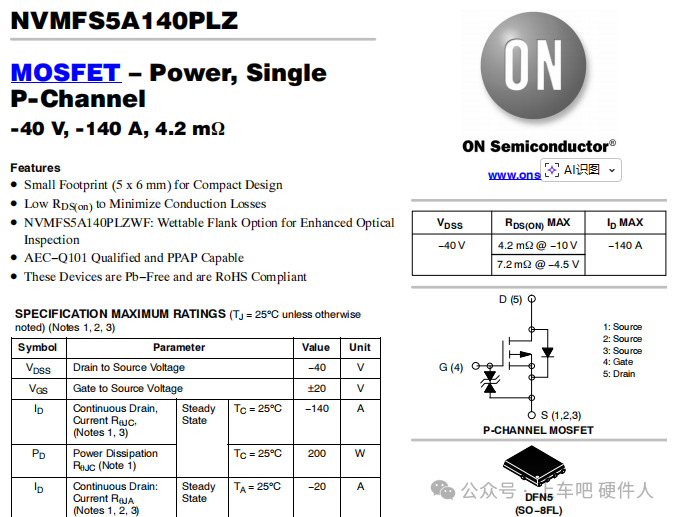
3. 电源防反与滤波设计
防反设计:
使用安森美(Onsemi)的P沟道MOSFET NVMFS5A140 进行电源防反接设计,以满足严苛的汽车电气性能测试要求(如-14V反向电压持续1分钟)。
电源端口Pi型滤波器:
在电源输入端口设计了π型(Pi型)滤波电路,其作用有二:一是滤除来自输入电源线的高频噪声,防止外部干扰传入设备内部;二是抑制设备内部产生的开关噪声倒灌回电源网络,确保产品符合电磁兼容性要求。

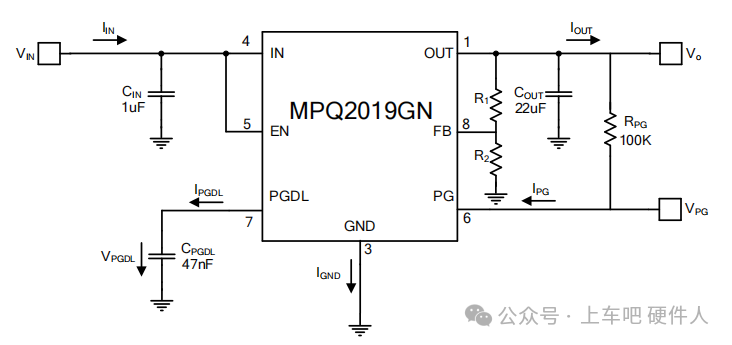
4. 辅助电源与通信接口
5V电源芯片 MPQ2019:
这是一颗输出电压为5V、电流能力300mA的电源芯片,主要负责为主控MCU CYT2B75CADQ0 供电。
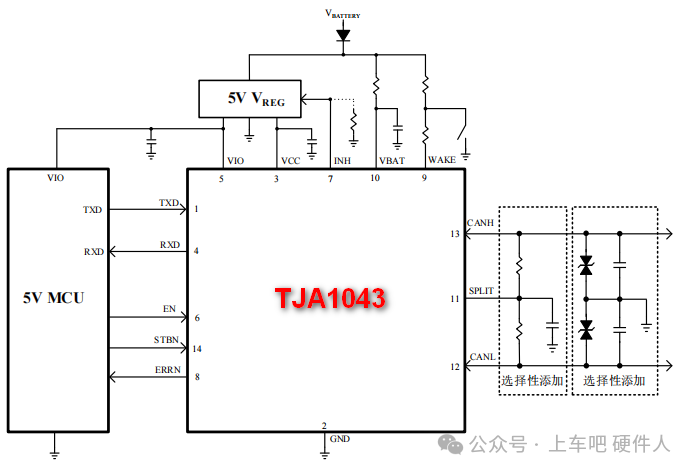
CAN总线收发器 TJA1043:
该芯片的一个关键特性是支持“睡眠时切断MCU电源”功能。当前照灯系统进入睡眠模式后,TJA1043可通过其使能引脚控制外部电源,切断MCU的5V供电,从而实现整机极低的静态电流,满足汽车前照灯产品低至200μA量级的设计需求。
CAN总线收发器 TJA1042:
通过另一路CAN总线(经由TJA1042)与LED矩阵驱动芯片 TPS92663 进行通信,这是实现汽车矩阵式自适应远光(ADB) 功能的关键通信链路。
跟踪LDO BD42530:
使用罗姆(ROHM)的跟踪型低压差线性稳压器(Tracking LDO)BD42530,为LED矩阵驱动芯片TPS92663提供5V供电,确保其电压稳定跟随前级输入。
5. 主控微控制器 (MCU)
CYT2B75CADQ0AZEGS 是英飞凌(原赛普拉斯)Traveo™ II 车身控制器系列的一款高性能汽车MCU。
- 处理器核心:
- 双核Cortex®-M4F: 主频高达150 MHz,集成浮点运算单元和DSP指令。
- 锁步架构: 采用双核锁步运行,满足 ASIL-B 功能安全等级要求。
- 内存保护单元: 增强软件运行的可靠性。

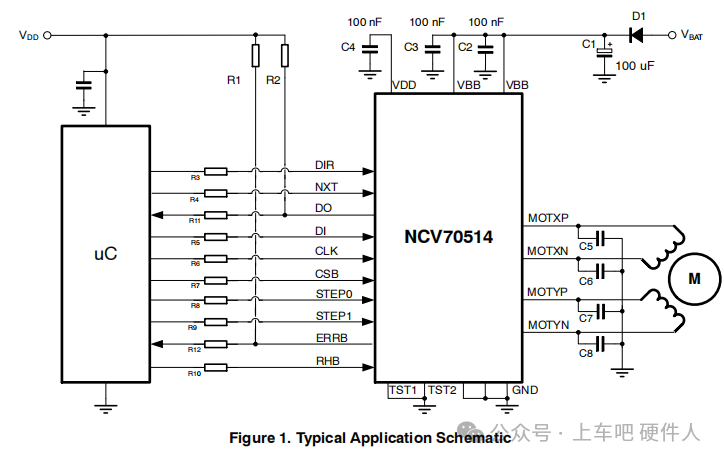
6. 步进电机驱动器
模块采用了安森美的 NCV70514 作为步进电机驱动器。
- 特点: 支持可编程电流控制(高达800mA),并集成了堵转检测功能。
- 应用: 专门用于驱动前大灯水平调节或自适应前照灯系统中的机械调整机构(如透镜或反射碗移动)。堵转检测功能可以有效防止机构卡死导致电机或机械部件损坏。
总结
本次对小米汽车前照灯控制模块的硬件拆解显示,其设计采用了成熟的Boost-Buck两级电源架构,并选用了TI、英飞凌、安森美等厂商的高集成度汽车级芯片。在EMC设计上,通过芯片选型(如带展频功能的Boost芯片)、使用一体成型电感、优化PCB叠层与布局等手段进行了充分考虑。主控MCU满足了功能安全要求,通信接口完备,整体方案针对矩阵式ADB等先进灯光功能进行了硬件支持。
本文由云栈社区进行技术内容优化与编排,旨在为硬件工程师提供清晰的技术参考。
 发表于 2026-1-20 19:04:25
|
查看: 209|
回复: 0
发表于 2026-1-20 19:04:25
|
查看: 209|
回复: 0
