本文将以圣邦微电子的SGM61630芯片为例,系统性地为你拆解如何将一个标准的Buck(降压)变换器,重构为一个能够稳定输出负电压的反向Buck-Boost变换器。我们将从拓扑原理、电压电流应力分析出发,详细讲解关键辅助功能(如使能、同步、PG信号)的接口设计,并通过一个24V输入转-15V/1.5A输出的完整设计实例来验证方案的可行性。无论你是正在为精密仪器寻找负电源方案,还是想深入了解DC-DC变换器的拓扑灵活性,这篇文章都能提供从理论推导到动手实践的全流程指南。
引言
在许多精密电子系统中,例如医疗设备、测试测量仪器和运算放大器供电线路中,常常需要一组稳定的负电压轨,并且要求这个负压输出能与输入电源共地。反向Buck-Boost(降压-升压)变换器恰恰能满足这一需求:它不仅可以实现升降压功能,还能反转输出电压的极性。一个令人兴奋的事实是,通过对功率级电路的拓扑连接和反馈网络进行巧妙调整,几乎任何常规的Buck变换器都可以被重构为反向Buck-Boost变换器。本文将以SGM61630这款集成功率管的同步Buck控制器为例,为你详细阐述重构的具体方法、设计要点以及注意事项。这套方案思路清晰,同样适用于非同步整流架构的芯片实现。
反向Buck-Boost变换器原理
2.1 拓扑重构与连接方式
图1展示了一个典型Buck变换器的基本拓扑结构。在Buck配置下,输出的正极($V_{OUT}$)连接到电感器,而输出的负极则直接连接到Buck IC的GND引脚。
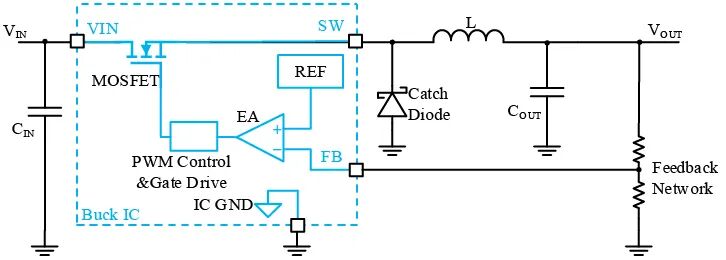
图1:Buck变换器基础拓扑
反向Buck-Boost拓扑与Buck拓扑在元件构成上高度相似,其关键区别在于连接方式。图2清晰地展示了如何将Buck变换器“改造”为反向Buck-Boost变换器。核心操作是:将原来Buck电路的输出正极重新定义为系统的地(System GND),而原本Buck IC的“IC GND”引脚则变成了我们所需的输出负极(-$V_{OUT}$)。同时,需要在输入电源和这个新定义的System GND之间增加一个额外的输入电容 $C_{IN}$。
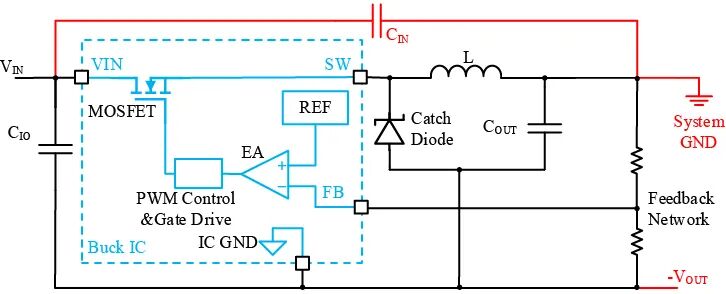
图2:反向Buck-Boost变换器拓扑(由Buck重构而来)
这里有一个至关重要的细节:在反向Buck-Boost连接中,IC GND直接与负输出电压相连。这意味着芯片所有引脚的电位都是相对于这个负压的,这会对Buck IC引脚承受的电压应力产生根本性影响,相关控制引脚(如EN、SYNC)的外部电路必须重新设计,我们会在第3章“辅助功能”中详细说明。
经过上述连接调整,电路的工作原理随之改变:
- MOSFET导通时:功率二极管截止,电感两端的电压为 $V_{IN}$,电感电流线性上升。此时,能量由输出电容 $C_{OUT}$ 提供给负载。如图3(a)所示。
- MOSFET关断时:功率二极管导通,电感两端的电压为 -$V_{OUT}$,电感电流线性下降。此时,电感的储能被释放,与输入电源一起为负载供电并为输出电容充电。如图3(b)所示。
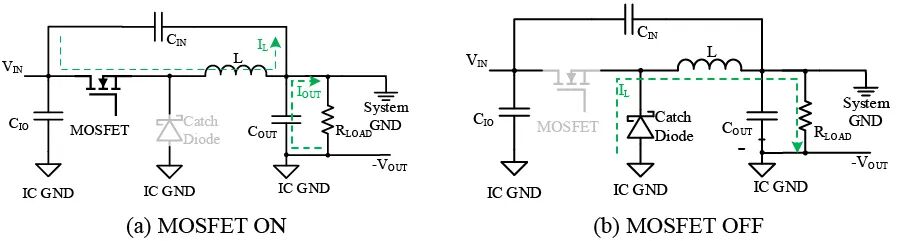
图3:反向Buck-Boost变换器工作原理 (a) MOSFET导通 (b) MOSFET关断
在连续导通模式下,变换器的占空比 $D$ 可以推导为:
$$
D = \frac{V_{OUT}}{V_{OUT} + V_{IN}}
$$
2.2 电压与电流应力分析
将Buck IC配置为反向Buck-Boost时,必须特别关注其电压耐受能力。观察图2,Buck IC的VIN引脚和GND引脚之间的电压差不再是 $V_{IN}$,而是输入电压与输出电压绝对值之和,即 $V_{MAX} = V_{IN} + V_{OUT}$。例如,从+24V输入转换到-15V输出,就要求所选Buck IC的输入电压范围至少能覆盖39V。同样,在MOSFET导通期间,功率二极管承受的反向电压也是 $V_{IN} + V_{OUT}$,选型时必须考虑这个更高的电压应力。
图2中,跨接在 $V_{IN}$ 和 -$V_{OUT}$ 之间的电容 $C_{IO}$,其承受的电压同样是 $V_{IN} + V_{OUT}$。但这里有个隐藏的风险:如果 $V_{IN$ 快速上电,瞬间会产生一个浪涌电流,路径为:$V_{IN} \to C_{IO} \to IC\ GND \to$ 功率二极管 $\to$ 电感 $\to$ System GND。这个瞬态电流可能带来两个问题:1)它流经功率二极管(或同步Buck IC的体二极管)时,可能导致SW节点电位被拉低至IC GND以下,对于SW引脚耐负压能力较弱的芯片,可能造成损坏;2)瞬态电流在电感上产生感应电动势,与二极管作用叠加,可能在 $V_{OUT}$ 上产生一个瞬态的正向电压尖峰。因此,作为防护与VIN引脚去耦的折中,一般建议 $C_{IO}$ 的容值不要太大,通常推荐使用0.1μF。
电流应力方面,Buck和反向Buck-Boost也有显著不同。在标准Buck配置中,电感电流始终流向负载,因此平均电感电流就等于输出电流。但在反向Buck-Boost中,电感能量仅在MOSFET关断期间通过二极管传递给负载,导致平均电感电流大于输出电流。两种拓扑的电感电流计算公式对比如表1所示。
表1:Buck拓扑与Buck-Boost拓扑电感电流对比
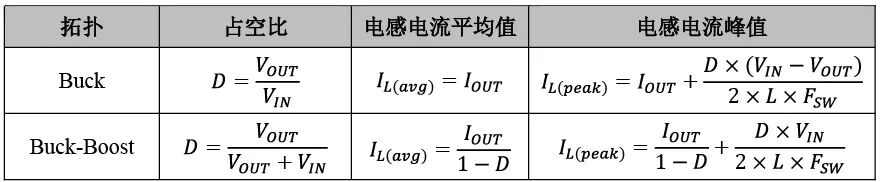
从表1可以明确看出,在相同的负载条件下,反向Buck-Boost变换器的电感电流峰值要显著高于Buck变换器。因此,在设计重构时,必须计算并确保电感电流峰值不超过所选Buck IC规格书中规定的峰值电流限值 $I_{LIMT}$。具体的计算示例,我们将在第4章“设计实例”中展开。
辅助功能设计
在反向Buck-Boost配置中,由于IC GND变成了负输出端,芯片所有控制信号的参考电平都变成了这个负压。如果系统需要利用这些功能,就必须将控制信号的参考电平“平移”回System GND。
3.1 使能信号接口设计
如果系统不需要控制使能,最简单的方法是将EN引脚通过一个电阻直接上拉到 $V_{IN}$。如果需要系统控制,则必须设计一个简单的电平转换电路,如图4所示。
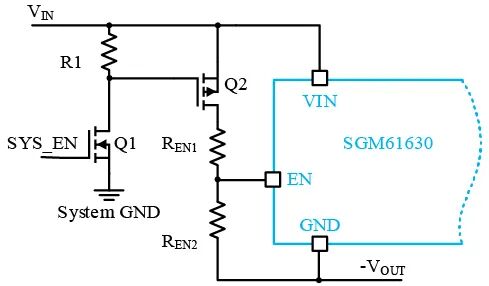
图4:EN引脚电平转换电路
当系统使能信号SYSEN为高电平(足以使Q1导通)时,Q2的栅极通过Q1被拉低至System GND。由于Q2的源极接在 $V{IN}$,其栅源电压$V{GS}$变为负值,从而使Q2这个P-MOSFET导通。此时,$V{IN}$通过电阻分压器($R{EN1}$,$R{EN2}$)为EN引脚提供电压,从而开启芯片。设计时需要特别注意,确保在开启和关闭两种状态下,Q2的栅漏电压$V{GD}$和栅源电压$V{GS}$始终处于MOSFET的安全工作区内。以SGM61630为例,图4中设置$R{EN1}=R{EN2}=R1=100k\Omega$。图5展示了系统控制使能和禁用时的波形,测试条件为20V输入,-15V/1.5A输出。
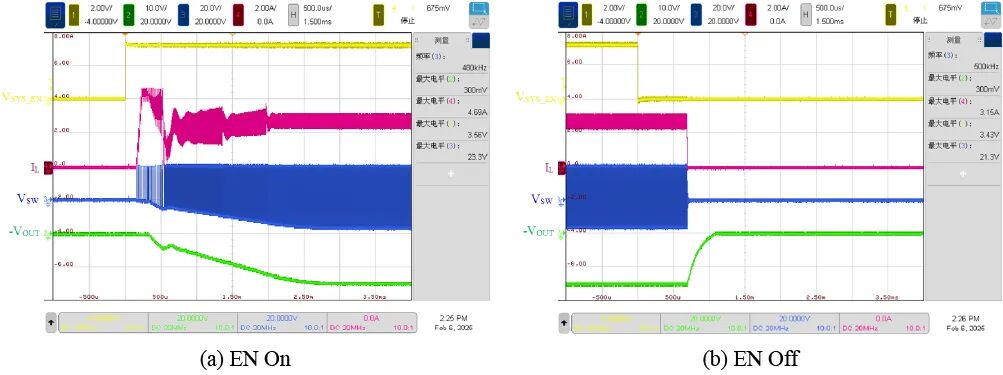
图5:反向Buck-Boost变换器使能(a)和禁用(b)波形
如果需要利用EN引脚配置欠压锁定功能,可以按照图6设置电阻分压网络。
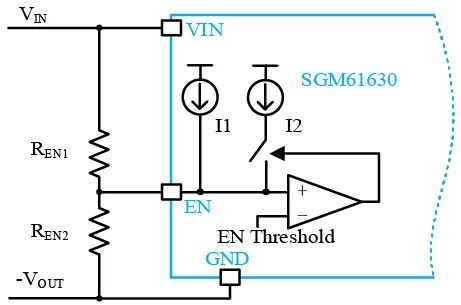
图6:EN引脚用于UVLO的分压电路
开启电压 $V_{START}$ 的计算与Buck模式相同,因为启动前通常没有负压输出:
$$
V_{START} = V_{ENH} \times (1 + \frac{R_{EN1}}{R_{EN2}}) + I1 \times R_{EN1}
$$
启动后,关断电压 $V_{STOP}$ 则需要考虑负输出电压的影响:
$$
V_{STOP} = (V_{ENL} + V_{OUT}) \times (1 + \frac{R_{EN1}}{R_{EN2}}) + (I1 - I2) \times R_{EN1} - V_{OUT}
$$
以SGM61630为例,$V_{ENH}=1.17V$,$V_{ENL}=1.12V$,取 $R_{EN1}=430k\Omega$,$R_{EN2}=30k\Omega$,$I1=1\mu A$,$I2=3.7\mu A$,$V_{OUT}=-15V$。计算得 $V_{START}=17.51V$,$V_{STOP}=0.15V$。
3.2 同步信号接口设计
对于带有SYNC引脚的Buck芯片,若需要让反向Buck-Boost变换器与外部时钟同步,也需要电平转换,电路如图7所示。
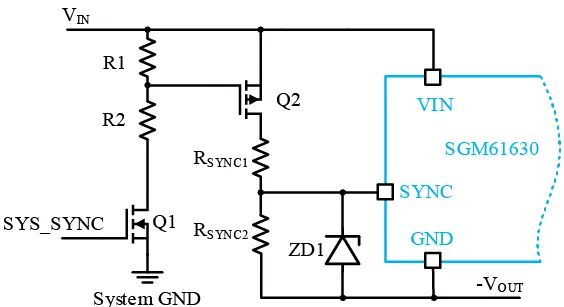
图7:SYNC引脚同步信号电平转换电路
当系统同步信号SYSSYNC为高时,Q1导通,$V{IN}$经R1、R2分压为Q2提供$V{GS}$,Q2导通。$V{IN}$通过$R{SYNC1}$、$R{SYNC2}$的分压将SYNC引脚拉高。注意,SYNC引脚耐压通常较低,必须添加稳压管ZD1进行钳位保护。考虑到功耗,$R{SYNC1}$、$R{SYNC2}$阻值不能太小,因此在同步频率较高的场景,Q2应选择栅极电荷$Q_G$ 较小的P-MOSFET。
当SYSSYNC变低,Q1关断,随后Q2关断。Q2关断后,SYNC引脚通过 $R{SYNC2}$被下拉到 -$V_{OUT}$。由于稳压管ZD1存在结电容$Cj$,会导致同步信号有效边沿和芯片内部SW开关动作之间产生额外的延迟$t{delay}$(不包括芯片内部电路延迟)。以SGM61630为例(其同步机制为SW上升沿与SYNC下降沿同步),SYS_SYNC下降沿关断Q2后,$Cj$通过$R{SYNC2}$放电。当SYNC引脚电压从ZD1的稳压值$VZ$放电至低电平阈值$V{SYNC_L}$ 时,功率管才开启,从而造成滞后:
$$
t_{delay} = R_{SYNC2} \times C_j \times \ln(\frac{V_Z}{V_{SYNC\_L}})
$$
因此,高频同步应用应选择结电容 $C_j$ 较小的稳压管。SGM61630的同步波形实测如图8所示。
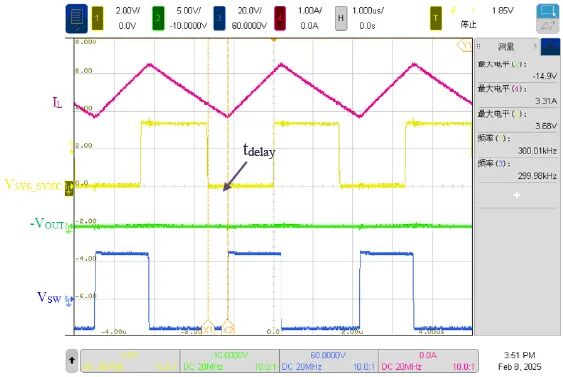
图8:同步信号与SW开关波形(可见t_delay)
3.3 PG信号接口设计
如果系统不需要Power Good指示信号,可将PG引脚悬空。若需要,则需电平转换电路,如图9所示。
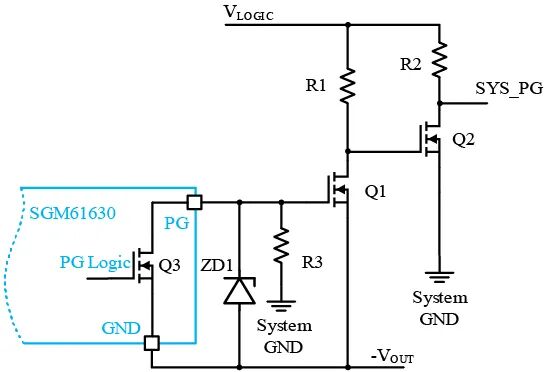
图9:PG引脚信号电平转换电路
当输出电压未建立时,芯片内部开关Q3导通,PG被拉至 -$V_{OUT}$,此时Q1关断、Q2导通,SYSPG被下拉到System GND(低电平)。当输出电压建立后,Q3关断,PG被上拉至 -$V{OUT}+VZ$,此时Q1导通,Q2的$V{GS}$为负而关断,SYS_PG被上拉到逻辑电平$V{LOGIC}$(高电平)。同样,若PG引脚耐压值有限,当$V{OUT}$ 绝对值较大时,需加稳压管ZD1保护。以SGM61630为例,图9中设置R1=R2=100kΩ,R3=10kΩ。图10展示了电源开启和关闭时SYS_PG的波形。
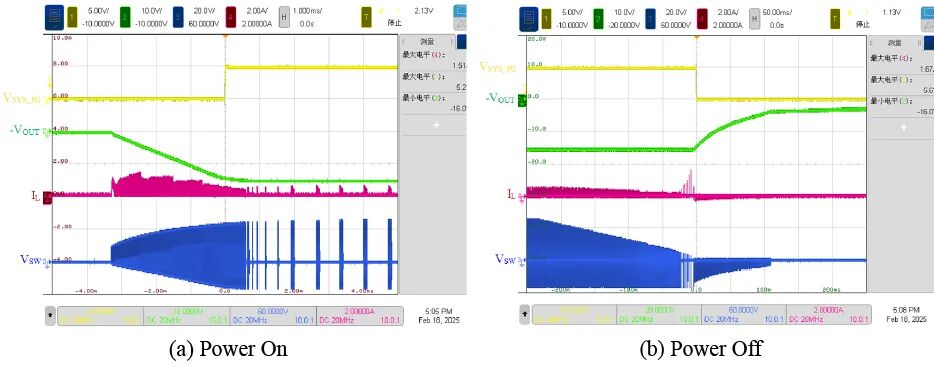
图10:反向Buck-Boost变换器Power on (a) 和 Power off (b) 波形
设计实例:24V转-15V/1.5A
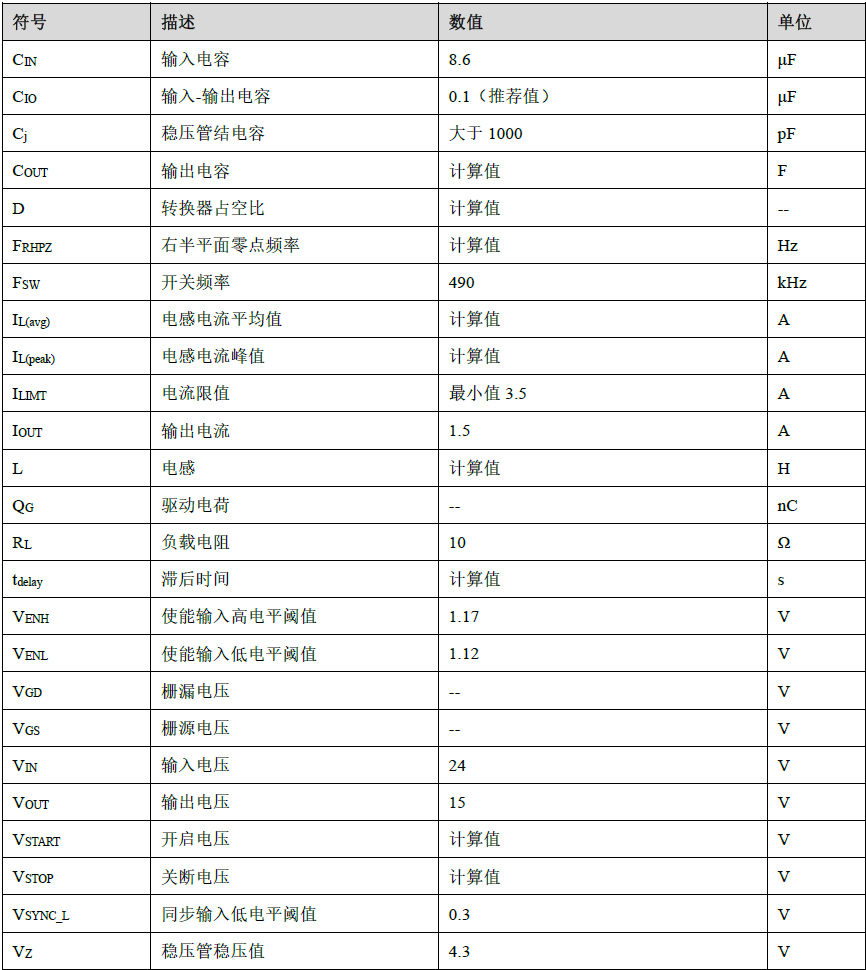
本章将以SGM61630的Demo Board(Buck配置)为基础,进行反向Buck-Boost变换器的完整设计。设计目标如表2所示。
表2:反向Buck-Boost变换器设计目标

4.1 原理图与快速验证
反向Buck-Boost变换器的完整原理图如图11所示。
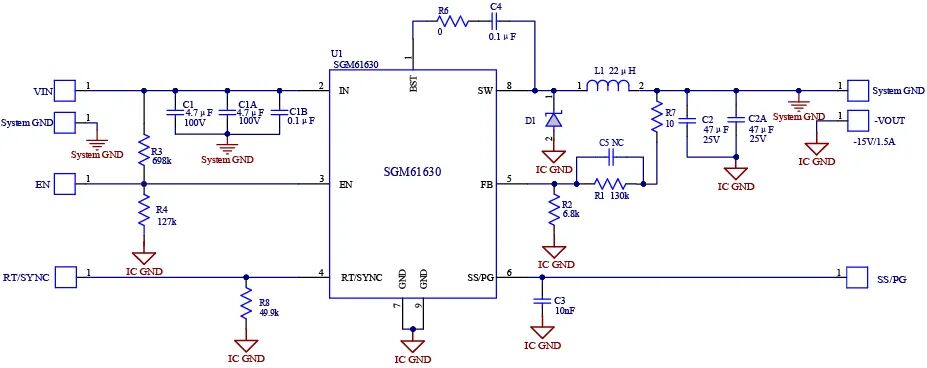
图11:反向Buck-Boost变换器原理图
为了快速验证方案可行性,可以直接在现有的Buck Demo板上修改连接,重构为反向Buck-Boost拓扑,连接方式如图12所示。当然,在新项目实际布板时,应遵循Buck-Boost的PCB布局规则重新规划,以获得最佳性能。
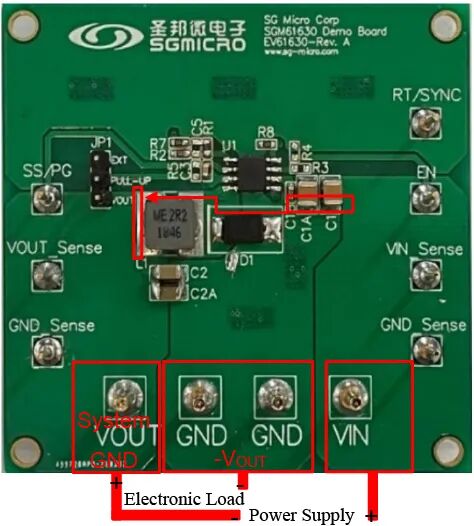
图12:在Buck Demo板上直接构建反向Buck-Boost的连接方法
注意:
- 断开原输入电容C1、C1A、C1B下端与IC GND的连接,改接到电感L1的左端焊盘(即新的System GND)。飞线应尽量短,以减少寄生电感对输入电压的干扰。
- 在Demo板的“VIN”和“VOUT”端子之间接入24V电源;在“VOUT”和“GND”端子之间接入电子负载。
- 将电感更换为22μH。
4.2 关键参数计算
首先计算变换器的占空比:
$$
D = \frac{V_{OUT}}{V_{OUT} + V_{IN}} = \frac{15}{15+24} \approx 0.385
$$
评估芯片及外围器件电压应力:$V_{MAX} = V_{IN} + V_{OUT} = 24 + 15 = 39V$。
为了在电感体积和转换效率间取得平衡,选取电感电流纹波比 $r = 0.35$,则所需电感量为:
$$
L = \frac{V_{IN} \times D}{r \times I_{OUT} \times F_{SW}} = \frac{24 \times 0.385}{0.35 \times 1.5 \times 490 \times 10^3} \approx 22.9 \mu H
$$
本实例选取 $L = 22 \mu H$,计算电感电流峰值:
$$
I_{L(peak)} = \frac{I_{OUT}}{1-D} + \frac{D \times V_{IN}}{2 \times L \times F_{SW}} = \frac{1.5}{1-0.385} + \frac{0.385 \times 24}{2 \times 22 \times 10^{-6} \times 490 \times 10^3} \approx 2.44 + 0.43 \approx 2.87A
$$
计算值2.87A小于SGM61630规格书中 $I_{LIMT}$ 的最小值3.5A,满足要求。
反向Buck-Boost变换器存在一个右半平面零点,其频率为:
$$
F_{RHPZ} = \frac{(1-D)^2 \times R_{LOAD}}{2 \pi \times D \times L}
$$
其中 $R_{LOAD} = V_{OUT} / I_{OUT} = 10 \Omega$。代入得 $F_{RHPZ} \approx 9.8 kHz$。
为保证系统稳定,穿越频率应小于RHPZ频率的1/4(约2.45kHz)。这要求我们或者减小电感以提高 $F_{RHPZ}$,或者增加输出电容以降低穿越频率。需要特别注意的是,在此架构中,反馈补偿网络的前馈电容需谨慎添加,因为它虽可提升相位裕度,但也会抬高增益曲线,可能使穿越频率靠近RHPZ,反而引发稳定性问题。在本设计中,我们使用两个47μF/25V的X5R陶瓷电容并联作为 $C_{OUT}$。
4.3 测试结果
基于以上设计进行实测,关键波形如下:
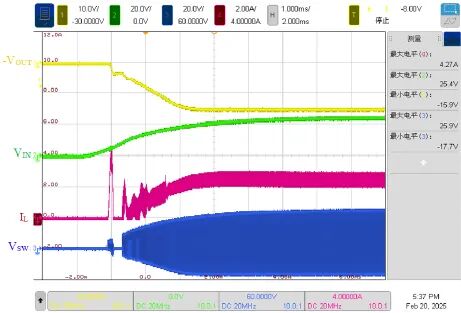
图13:$V_{IN}=24V$,-15V/1.5A输出,启动过程
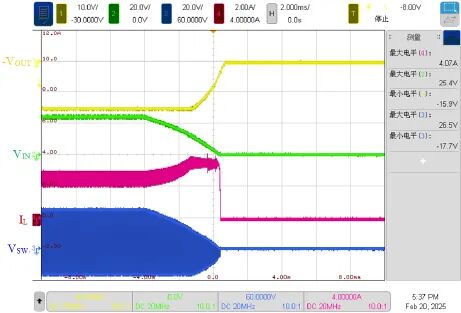
图14:$V_{IN}=24V$,-15V/1.5A输出,关断过程
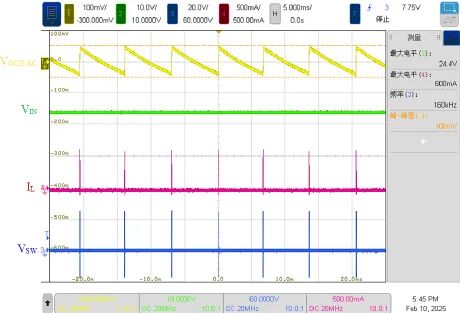
图15:24V输入,-15V/0A输出(空载)
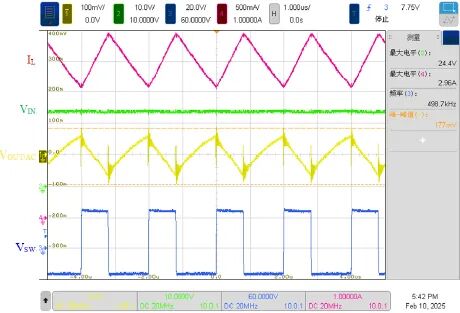
图16:24V输入,-15V/1.5A输出(满载稳态)
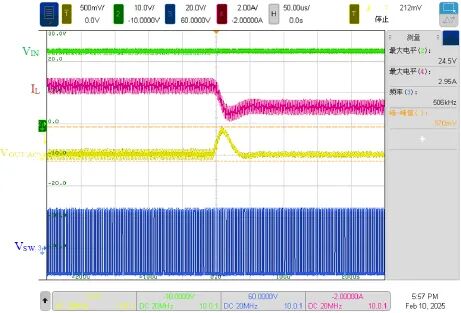
图17:负载从1.5A降至0.7A的瞬态响应
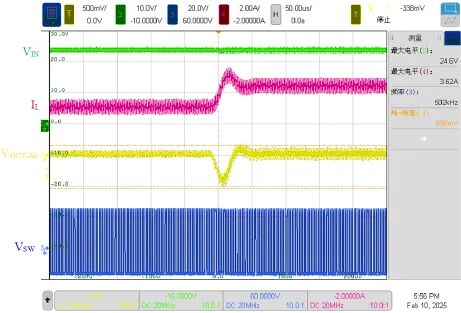
图18:负载从0.7A升至1.5A的瞬态响应
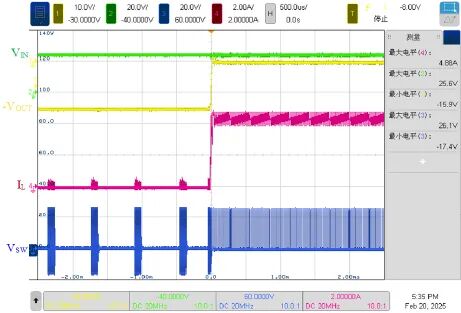
图19:输出短路保护触发瞬间
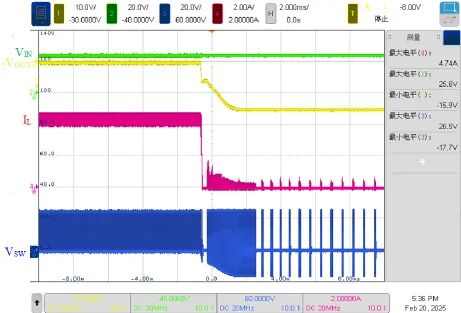
图20:输出短路保护恢复过程
测试结果表明,基于SGM61630重构的反向Buck-Boost变换器,在24V输入、-15V/1.5A输出的条件下,工作稳定,动态响应良好,各项保护功能正常。
总结
将Buck变换器重构为反向Buck-Boost变换器,可以遵循以下系统化步骤:
- 计算电压应力:确定变换器需承受的最大电压 $V_{IN} + V_{OUT}$。
- 计算电流应力:使用表1中的公式计算最大电感电流 $I_{L(peak)}$。
- 选型芯片:选择满足上述电压和电流应力要求的Buck型IC。
- 确定基础元件:参照数据手册,设定频率设置电阻、反馈网络分压器等。
- 设计辅助电路:评估并使能、同步、PG等信号的电平转换电路。
- 快速验证:可在现有Buck Demo板上按图12方式搭建:
a) 将Buck的正输出端定义为System GND。
b) 将Buck的IC GND作为负电压输出端(-$V_{OUT}$)。
c) 输入正极连接保持不变。
- 正式实施要点:
a) 重点优化输入、输出电容的布局布线。
b) 保证反馈信号路径干净、简洁。
c) 开关节点SW走线尽可能短,并远离敏感的模拟信号线。
通过本文详细的原理分析、设计实例和测试验证,我们展示了利用常见Buck控制器实现高性能负电源轨的完整方案。这种方法灵活且成本效益高,为硬件工程师提供了一种实用的设计选择。希望这篇深入的技术剖析能对你的项目有所帮助,也欢迎你在云栈社区与其他开发者继续交流电源设计方面的经验与心得。
参考资料
[1] SG Micro Corp. SGM61630 Demo Board Test Report [EB/OL]. https://www.sg-micro.com/evm-detail/EVKIT-SGM61630.
[2] SG Micro Corp. SGM61630 Datasheet [EB/OL]. (2023-12). https://www.sg-micro.com/rect/assets/2e4aa3c1-fd17-4b20-ac75-892cfe5f2e56/SGM61630.pdf.
附录:关键参数计算表
 发表于 2026-3-6 03:35:46
|
查看: 520|
回复: 0
发表于 2026-3-6 03:35:46
|
查看: 520|
回复: 0
