嵌入式开发 70% 的工作都在“打通通信”。选错协议可能导致带宽不足,或者在工业现场被电磁干扰折磨到崩溃。
引言:硬件不说话,但它在交流
凌晨两点,工位上只剩下显示器的微光。逻辑分析仪上的波形像心电图一样跳动,串口助手里满屏的乱码让人头皮发麻。你盯着示波器上那根不该出现的毛刺,开始怀疑人生——明明代码逻辑没问题,为什么数据就是收不对?
如果你也经历过这种场景,恭喜你,你已经是一名合格的嵌入式工程师了。说实话,嵌入式开发这行,写代码可能只占 30% 的时间,剩下 70% 都在干一件事:让两个芯片好好说话。
MCU 和传感器之间要通信,主控和屏幕之间要通信,这个板子和那个板子之间还要通信。通信协议选错了,轻则速度不够用,重则在工厂现场被电磁干扰搞得欲仙欲死。今天这篇文章,不讲教科书上那些枯燥的定义和时序图,聊聊实战中积累的经验和那些值得注意的“坑”。
协议“御三家”:近场板级通信
在嵌入式世界里,有三个协议你一定会遇到:UART、I2C、SPI。它们就像板级通信的“三大门派”,各有绝活,也各有脾气。
1. UART:永远的调试老大哥
UART 可能是每个嵌入式工程师接触的第一个协议。说白了,它就是两根线的“悄悄话”——TX 发送,RX 接收,再加一根 GND,齐活。没有时钟线,双方约定好波特率,各发各的。

为什么它是“调试老大哥”?
因为简单。代码里加一行 printf,数据就能从串口吐出来。没有串口打印,你可能连程序跑到哪一行都不知道。
实战踩坑点:
- 波特率误差:两边波特率差太多就会乱码。常见的 115200 波特率,如果晶振不准,误差超过 3% 就可能出问题。
- 一定要接 GND:很多新手只接 TX/RX,忘了接地线,结果电平参考点不一样,数据全是乱的。
- 电平匹配:3.3V 的 MCU 直接接 5V 的模块?小心烧 IO 口。
老司机语录:“如果没有串口,我可能连代码跑到哪了都不知道。”
2. I2C:慢速设备的“大管家”
I2C 只需要两根线:SCL(时钟)和 SDA(数据),就能挂一堆设备。温湿度传感器、EEPROM、RTC 时钟芯片……这些“慢吞吞”的外设,基本都是 I2C 接口。
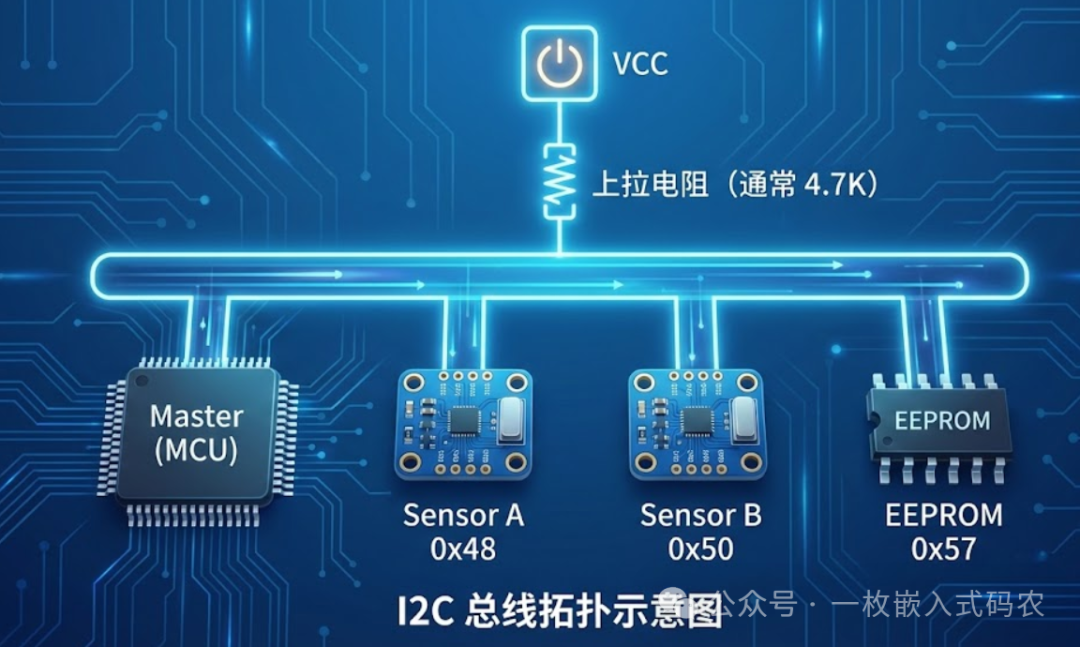
核心机制:
- 寻址制:每个设备有唯一地址,主机喊“0x48 号,出来说话”,只有地址匹配的设备才会应答。
- 开漏输出 + 上拉电阻:这是 I2C 的精髓。SDA 和 SCL 都是开漏结构,平时被上拉电阻拉高,设备想输出低电平就把线拉低。
为什么一定要上拉电阻?
因为开漏输出只能拉低,不能拉高。没有上拉电阻,总线就永远是低电平,啥也干不了。上拉电阻的阻值也有讲究,太大了上升沿会变慢,太小了功耗又高,一般 4.7KΩ 是个安全值。
避坑指南——死锁问题:
I2C 最恶心的 Bug 就是总线死锁。某个从设备在传输过程中被打断,SDA 卡在低电平不松手,整条总线就瘫痪了。
解决办法:在初始化时,手动翻转 SCL 时钟线 9 次,把卡住的从设备“踢醒”。
3. SPI:追求极致速度的“快男”
如果说 I2C 是慢悠悠的公交车,SPI 就是风驰电掣的跑车。全双工通信、时钟频率动辄几十 MHz,刷屏、读写大容量 Flash,SPI 是不二之选。
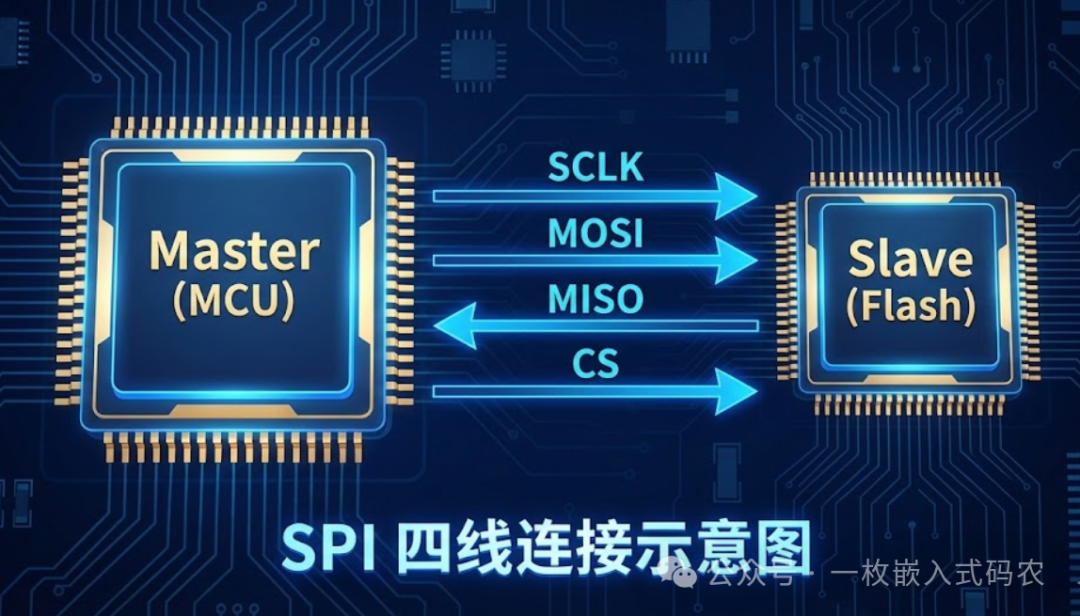
四根线的分工:
- SCLK:时钟,主机说了算
- MOSI:主机发数据给从机
- MISO:从机发数据给主机
- CS:片选,拉低表示“我要跟你说话了”
面试必考:四种时序模式
SPI 有个让新手头疼的东西:CPOL 和 CPHA。
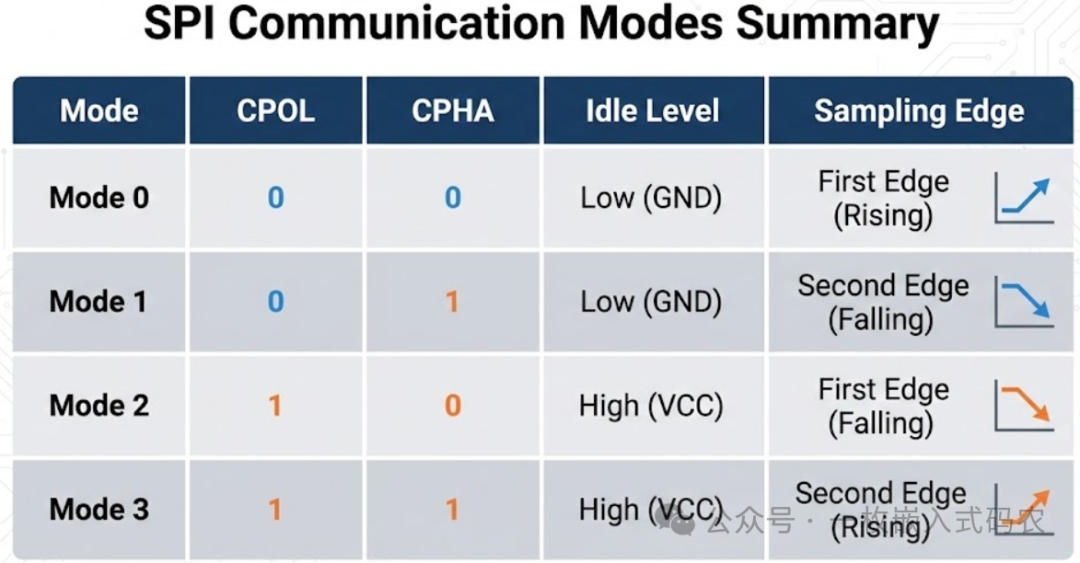
记不住没关系,看从设备的数据手册,它用哪个模式你就配哪个。Mode 0 和 Mode 3 最常见。
一句话总结:刷屏、写大容量 Flash,首选 SPI。
进阶协议:长距离与工业现场
板级通信搞定了,但如果你的设备要装到汽车里、工厂里,或者两个设备隔着几十米远,上面那三个协议就不够用了。这时候,就轮到 CAN 和 RS485 登场了。
4. CAN 总线:嵌入式界的“坦克”
CAN 总线最早是博世公司为汽车设计的。你想想,汽车里那么多 ECU(发动机控制、ABS、安全气囊……),还要在发动机舱那种电磁环境恶劣的地方稳定工作,普通协议早就趴窝了。
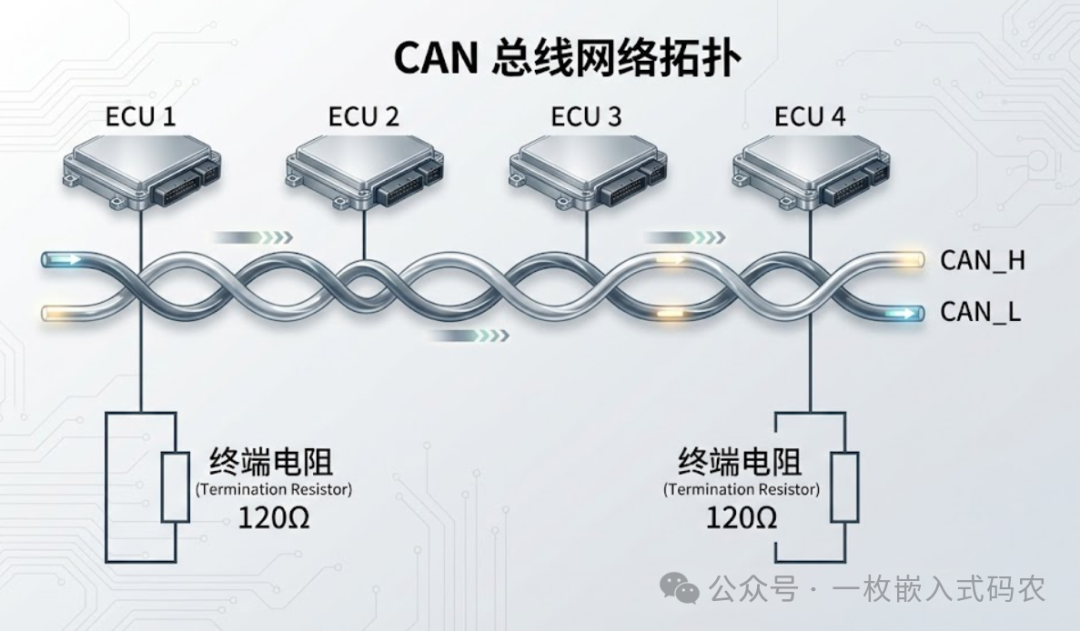
CAN 为什么这么牛?
- 差分信号:CAN_H 和 CAN_L 两根线,电压差代表数据。外界干扰同时作用于两根线,一减就抵消了,抗干扰能力拉满。
- 硬件仲裁:多个节点同时发数据怎么办?CAN 有硬件仲裁机制,ID 小的优先级高,自动让路,不会撞车。
- 错误检测:CRC 校验、位填充、错误帧……CAN 控制器自带一套完整的纠错机制。
硬核知识点:120Ω 终端电阻能不能省?
不能。
CAN 总线两端必须各接一个 120Ω 电阻,用来匹配阻抗、吸收反射信号。少了它,高速通信时波形会“振铃”,数据就乱了。
实测方法:用万用表量 CAN_H 和 CAN_L 之间的电阻,应该是 60Ω 左右(两个 120Ω 并联)。如果是 120Ω,说明少了一个;如果是无穷大,说明一个都没接。
应用场景:
汽车电子、无人机、工业机器人、医疗设备……凡是对可靠性要求高的场合,CAN 都是首选。
5. RS485:老当益壮的远距离王者
RS485 是个“老协议”了,但至今仍活跃在各种工业场景。原因很简单:便宜、稳定、能跑一公里。
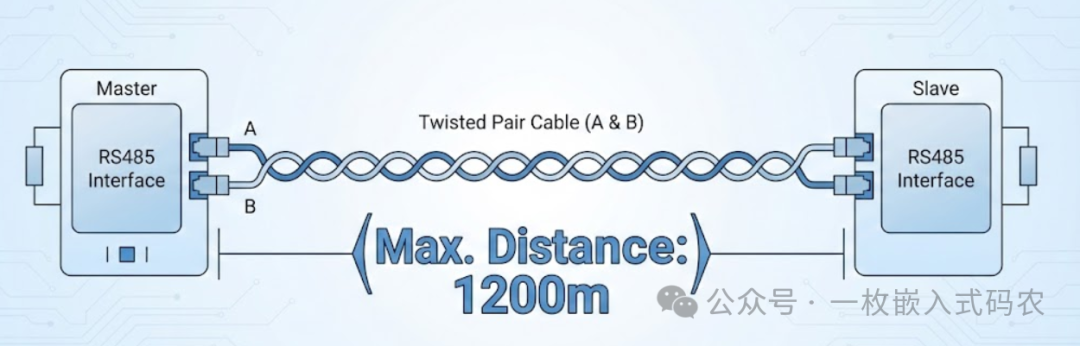
RS485 的特点:
- 差分信号:和 CAN 一样,A/B 两根线差分传输,抗干扰。
- 半双工:同一时刻只能一个方向传输,要么发要么收。
- 一对多:一条总线上可以挂几十个设备。
- 传输距离:理论上 1200 米,实际工程中跑个几百米没问题。
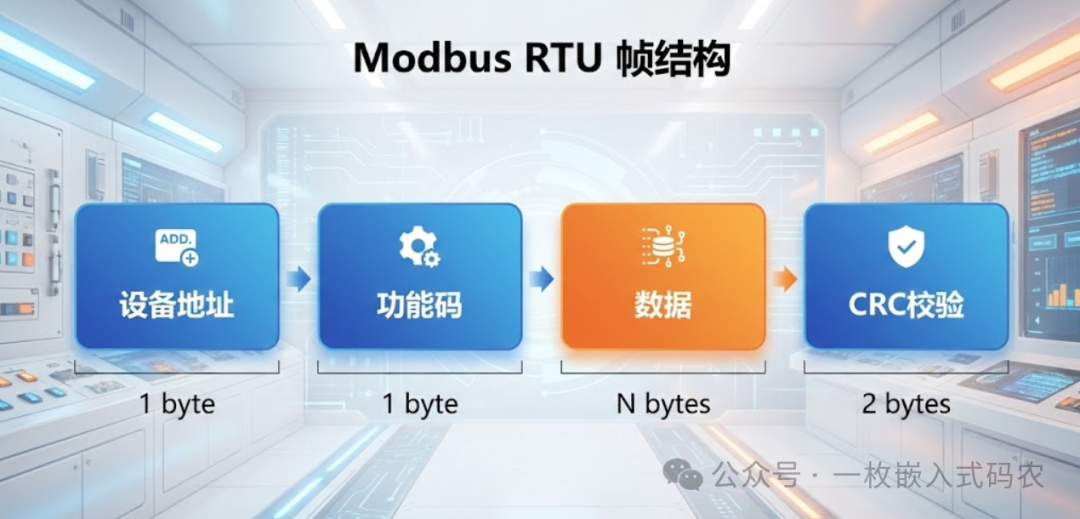
实战经验:RS485 必须配合 Modbus
RS485 只定义了物理层(电气特性),不管数据格式。所以实际使用时,几乎都要搭配 Modbus 协议。Modbus 定义了主从通信模式、寄存器读写规则、CRC 校验等。工业界用了几十年,稳得一批。
避坑提醒:
- RS485 芯片的 DE(发送使能)引脚要控制好,发完数据记得切回接收模式,不然总线会被你一直占着。
- 长距离传输时,线缆质量很重要,推荐用双绞屏蔽线。
选型指南:别在杀鸡时用牛刀
协议这么多,到底该怎么选?别慌,记住一个原则:够用就好,不要过度设计。
先看一张对比表:

选型决策树:
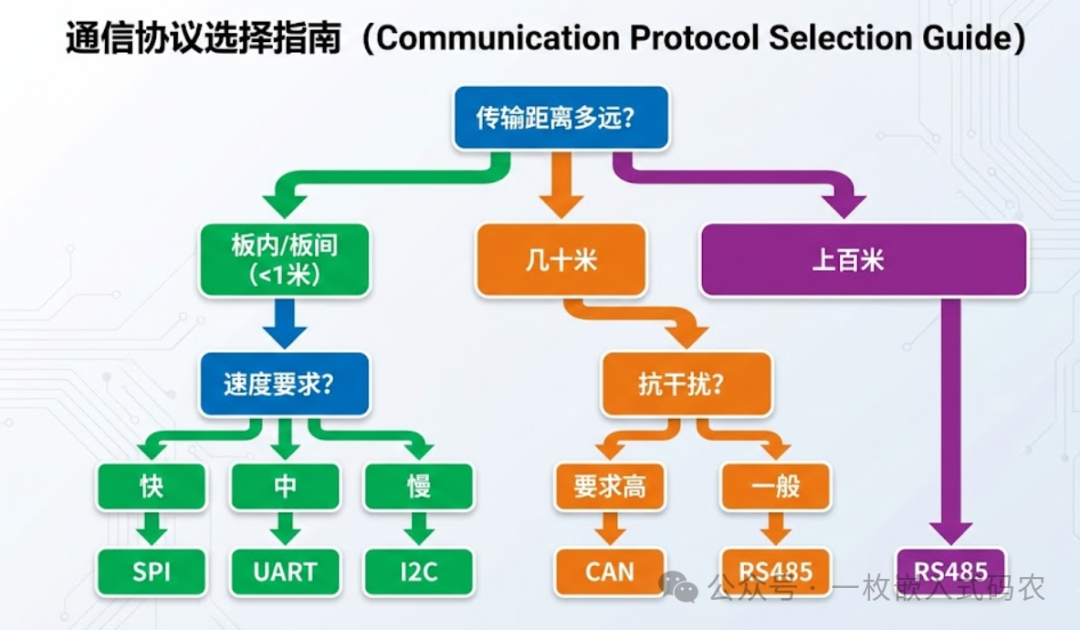
几个实用建议:
- 调试首选 UART:不管项目多复杂,先把串口调通,后面出问题有个打印口。
- 传感器优先 I2C:大多数传感器厂商都提供 I2C 接口,省引脚、接线简单。
- 高速外设用 SPI:屏幕刷新、Flash 读写,I2C 的速度根本不够看。
- 恶劣环境上 CAN:工厂车间、户外设备,电磁干扰大的地方,CAN 的可靠性值得信赖。
- 远距离选 RS485:设备分布在不同楼层或厂房,RS485 + Modbus 是性价比最高的方案。
调试心得:工欲善其事,必先利其器
协议选对了,代码写好了,但就是不通——这种情况太常见了。这时候,工具就是你的救命稻草。
神器推荐
1. 逻辑分析仪(必备)
几十块钱的 USB 逻辑分析仪,配合 PulseView 或 Saleae Logic 软件,能自动解析 UART、I2C、SPI 等协议。看波形比看代码直观一万倍。数据发没发出去、时序对不对、有没有 ACK,一目了然,堪称硬件调试的“火眼金睛”。
2. 示波器(进阶)
逻辑分析仪只能看逻辑电平(高/低),示波器能看真实的模拟波形。信号上升沿太慢?有没有过冲和振铃?电压幅度够不够?这些问题只有示波器能回答。
3. USB 转接模块
USB 转 TTL、USB 转 RS485、USB 转 CAN……这些小模块能让你的电脑直接和目标设备通信,调试必备。
调试方法论
多年踩坑总结出的三步法:
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ 第一步 │ │ 第二步 │ │ 第三步 │
│ 量电压 │ ──► │ 看波形 │ ──► │ 读代码 │
│ │ │ │ │ │
│ 供电正常? │ │ 时序对吗? │ │ 配置对吗? │
│ 电平匹配? │ │ 有数据吗? │ │ 逻辑对吗? │
└─────────────┘ └─────────────┘ └─────────────┘
第一步:量电压
很多“通信问题”其实是供电问题。VCC 是不是 3.3V?GND 有没有接好?不同电压域之间有没有电平转换?这是所有通信的物理基础。
第二步:看波形
用逻辑分析仪或示波器看实际波形。数据有没有发出来?格式对不对?从设备有没有应答?波形不会撒谎。
第三步:读代码
前两步都没问题,再去检查代码。时钟配置对不对?引脚复用对不对?中断有没有使能?
老司机的忠告:“波形永远比逻辑分析准确,协议文档是唯一的真理。”
结语:协议的尽头是物理
写了这么多,其实想说的就一句话:所有通信协议,本质上都是对高低电平的控制与妥协。
UART 用时间来区分比特,I2C 用地址来区分设备,SPI 用片选来指定对象,CAN 用差分来对抗干扰……不同的协议,只是在速度、距离、复杂度、可靠性之间做了不同的取舍。没有最好的协议,只有最合适的协议。
下次再遇到通信问题,别急着改代码。先想想:
- 物理连接对吗?
- 电平匹配吗?
- 时序配置对吗?
- 协议选对了吗?
把这几个问题想清楚,90% 的通信问题都能解决。扎实的硬件基础和清晰的调试思路,往往比任何高阶技巧都重要。如果你想就某个具体协议的实现细节展开更深入的探讨,也欢迎来云栈社区交流分享。
 发表于 2026-1-24 20:40:40
|
查看: 155|
回复: 0
发表于 2026-1-24 20:40:40
|
查看: 155|
回复: 0
