汽车座舱的复杂性与手机、平板等消费电子设备有本质区别,其核心在于数量庞大且种类繁多的外设与功能件。除了日益增多的显示屏,还有多达十几声道的音响系统、车内外的多个摄像头,以及电池、空调、氛围灯、座椅、门窗等各类域控制器,它们都需围绕座舱SOC进行高效协同。
本文将从更宏观的视角出发,探讨Android Automotive OS (AAOS) 如何扮演智能座舱的中枢角色。我们将解析其如何通过硬件抽象层、标准化接口和统一的软件架构,成功整合车内显示屏、摄像头及其他域控设备。主要内容包括:AAOS的基础架构、MIPI/DP/LVDS等总线如何管理多路音视频流、CarService与Vehicle HAL如何通过Some/IP、CAN等协议控制车载功能,以及该生态面临的技术挑战。
一、基础认知:什么是Android Automotive OS(AAOS)?
要理解Android座舱强大的外设整合能力,首先需明确其核心载体——Android Automotive OS(AAOS)的本质。AAOS并非普通Android系统的简单车载移植版,而是谷歌专为汽车场景深度定制、可直接运行在车载硬件上的完整操作系统。其核心价值在于构建了“硬件无关性”与“生态开放性”的底层框架,为整合多样化的外设提供了坚实基础。
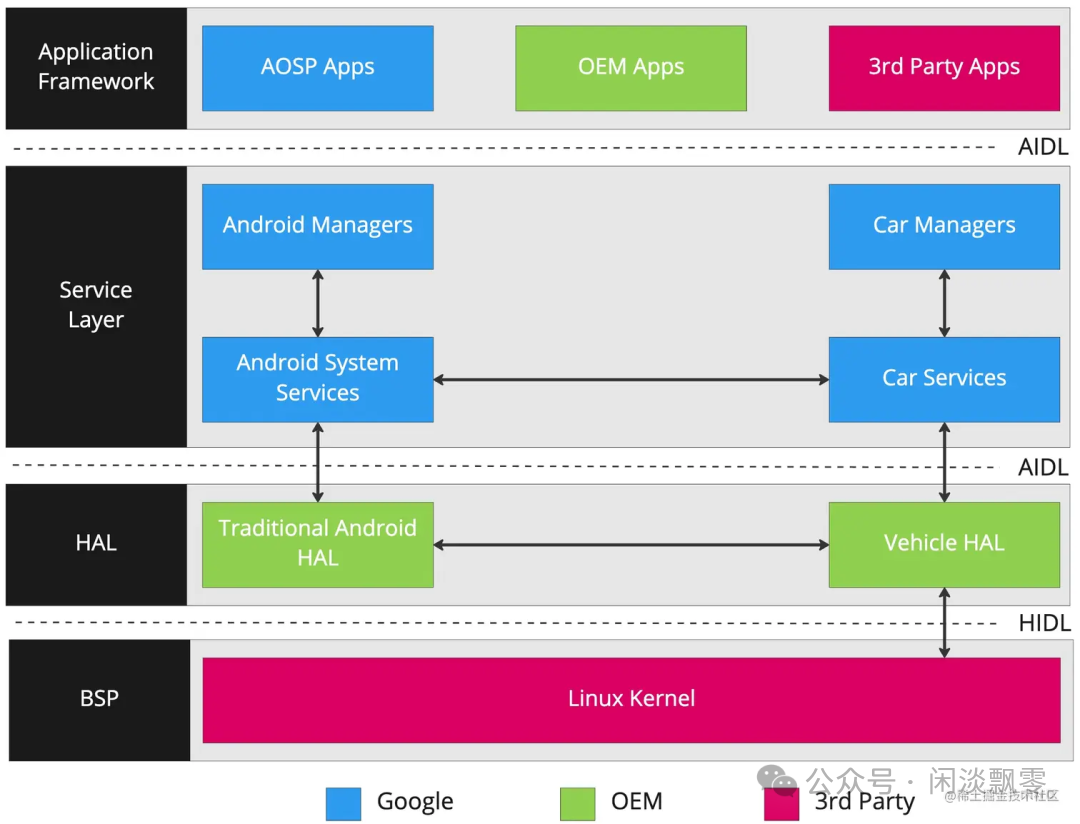
从架构层面看,AAOS采用经典的分层设计,自下而上分为五层,每一层的核心职责都直接服务于外设的整合与管理:
- 硬件层:包含座舱SOC、各类显示屏、摄像头、音响以及车身控制器等所有物理设备,是整合的物理载体。
- Linux内核层:提供设备驱动管理、进程调度、内存管理等核心系统能力,为上层系统与底层硬件的交互提供底层支撑。
- 硬件抽象层(HAL):这是AAOS实现外设整合的核心枢纽。它通过定义一套标准化的接口,屏蔽了不同硬件厂商的实现差异。无论显示屏采用的是MIPI还是LVDS接口,摄像头是单目还是多目,上层应用都通过统一的HAL接口进行访问,无需关心具体的硬件细节。
- 框架层与系统服务层:包含CarService、SurfaceFlinger、EVS(扩展视觉系统)等核心服务,扮演着外设协同“调度中心”的角色,负责将应用层的功能需求转化为具体的硬件控制指令。
- 应用层:包括系统预置应用(如仪表盘、空调控制界面)和第三方应用,它们通过Car API调用底层系统服务,最终实现对各类外设的功能控制。
与传统封闭的车载系统相比,AAOS的核心优势在于“统一化”。它通过标准化的HAL接口和系统服务,将原本分散、独立的外设纳入一个统一的管理框架中,从根本上避免了不同设备间的兼容性问题,为复杂的多外设协同工作创造了条件。
二、传输核心:总线技术如何实现多路音视频流的传输与显示?
车内音视频流的传输与显示,是座舱外设整合中最具挑战性的场景之一。它需要同时支撑多块显示屏的高清渲染、多路摄像头的实时视频采集、以及多声道音响的同步播放。这一切得以实现的技术核心,在于MIPI、DP、LVDS等专业总线技术与AAOS对应子系统的深度协同。
AAOS主要通过“显示系统”、“扩展视觉系统(EVS)”和“音频系统”三大子系统,分别对接不同的总线技术,实现音视频数据从采集、处理到输出的全链路管理。

1. 显示系统:MIPI DSI/DP/LVDS支撑多屏高清显示
AAOS的显示系统以SurfaceFlinger(表面合成器)和Display HAL为核心,负责将各个应用界面合成后,通过对应的总线传输至物理显示屏。不同的总线技术根据其特性,在车载场景中分工明确:
- MIPI DSI(显示串行接口):当前车载显示领域的主流选择,尤其适用于中控屏、数字仪表盘、AR-HUD等对分辨率和刷新率要求高、且传输距离较短的场景。DSI采用“1对时钟线 + 1至4条数据通道”的配置,单通道速率可达1.5-6 Gbps,四通道总带宽最高可达24 Gbps,足以轻松驱动4K@60Hz的高清显示。其支持HS(高速)和LP(低功耗)双模运行,高速模式传输图像数据,低功耗模式传输控制指令,整体功耗相比传统接口可降低90%以上,非常契合车载的节能需求。在AAOS中,Display HAL通过MIPI DSI控制器初始化屏幕,SurfaceFlinger将合成后的图像帧数据写入缓冲区,再通过DSI接口实时传输至屏幕显示。
- LVDS(低电压差分信号):一种传统的车载显示接口,优势在于抗干扰能力强、传输距离远(最长可达10米),常用于需要长距离走线的后排娱乐屏。它采用“1对时钟线 + 4对数据线”的并行差分传输模式,速率可达1.78 Gbps,能够满足全高清(FHD)分辨率的需求。AAOS通过Display HAL兼容LVDS接口,确保了与传统车载硬件的平滑过渡。部分车型会采用“长距离用LVDS,短距离用MIPI DSI”的混合方案,以兼顾系统兼容性与显示性能。
- DP(DisplayPort):主要用于高端车型的高刷新率、多屏级联等极致场景,例如8K中控屏或多屏拼接系统。最新的DP 2.1协议单通道速率高达40 Gbps,总带宽可达80 Gbps,支持8K@120Hz显示,并支持菊花链(Daisy Chain)连接,用单根线缆即可串联多块显示屏。AAOS通过Display HAL对接DP接口,以满足顶级车型对显示效果的极致追求。
此外,AAOS通过Presentation API和CarDisplayManager实现了灵活的多屏协同策略,支持主从模式(中控控制仪表显示)、多屏异显(主驾看导航、副驾看电影)、内容同步(安全警告多屏同时弹窗)等多种模式,确保不同屏幕间的显示内容能够精准、高效地协同工作。
2. 扩展视觉系统(EVS):MIPI CSI支撑多路摄像头实时采集
车内外的多路摄像头(如前视、环视、驾驶员监测DMS、乘客监测OMS等)构成了智能座舱的“视觉感知器官”。它们的数据传输与处理,高度依赖于MIPI CSI总线与AAOS的EVS系统协同工作。
MIPI CSI(摄像头串行接口) 是当前车载摄像头的主流接口,采用与MIPI DSI同源的差分传输技术。它支持1至4条数据通道,单通道速率最高6 Gbps,四通道总带宽24 Gbps,可轻松接入多达16路摄像头,满足360°环视、ADAS辅助感知等多摄协同需求。相比传统的并行CSI接口,MIPI CSI线束更精简(通常仅需5对差分线),抗电磁干扰能力更强,传输距离可达5米,完美适应车载复杂的电磁环境。
在AAOS架构中,EVS系统通过EVS Manager、EVS App和Camera HAL三层协作管理摄像头:系统启动时,EVS Manager会枚举所有可用的物理摄像头并为其分配唯一ID;当应用(如倒车影像App)通过EVS API请求摄像头数据时,EVS Manager会创建虚拟摄像头实例,实现多个应用共享同一物理摄像头硬件;底层的Camera HAL则通过I2C总线配置摄像头参数(如曝光、对焦),并通过MIPI CSI接口接收原始图像数据,数据经ISP(图像信号处理器)处理后,通过共享内存机制传递给上层应用或AI算法模块,最终由显示系统呈现在指定的屏幕上。
3. 音频系统:专用总线支撑多声道同步发声
对于拥有多达十几个声道的车载高端音响系统,AAOS通过音频HAL和专用音频总线(如I2S、A2B)来实现高保真音频流的传输与精确同步。音频HAL负责接收来自应用层的音频数据,通过I2S总线传输至外置的音频功放,再由功放驱动各个声道的扬声器发声。AAOS的亮点在于其CarAudioService,它在基础Audio HAL之上实现了车载专属的多音区(Audio Zone)管理,可以为驾驶员、副驾驶、后排左右区分别建立独立的音频焦点和音量控制,从而实现“副驾看电影、驾驶员听导航”的声场隔离。而更复杂的均衡器(EQ)调校、主动降噪(ANC)等专业音频处理功能,通常由外置的专用音频DSP芯片完成,DSP通过I2C或SPI总线与座舱SOC进行指令和数据交互。
三、控制核心:CarService与Vehicle HAL如何协同控制车载功能?
除了音视频外设,对电池、空调、氛围灯、座椅、门窗等车身控制器的管理,是座舱智能化的另一关键。其控制核心依赖于AAOS中的CarService与Vehicle HAL两大组件,它们通过Some/IP、CAN、LIN等车载网络协议,实现了应用层与车身域之间的跨域通信与精准控制。这一协同机制的核心思想是 “车辆属性抽象”——将所有的车载功能状态(如车速、油量、空调温度、座椅位置)都抽象为统一的、标准化的属性,从而实现上层应用与底层异构硬件的彻底解耦。

1. 核心组件分工:CarService是“调度中心”,Vehicle HAL是“协议转换器”
- CarService:作为运行在AAOS框架层的核心系统服务,它是车辆控制的“调度中心”。它负责接收来自应用层的所有控制请求(例如“调节空调温度”、“打开座椅加热”),并将这些请求转化为对标准化车辆属性的操作指令。同时,它也管理着应用对车辆属性的订阅,当车辆状态发生变化时(如车门被打开),主动向订阅的应用推送更新。
- Vehicle HAL:作为硬件抽象层(HAL)的核心组件,它是CarService与真实车载硬件之间的“协议转换器”和“桥梁”。它定义了一套涵盖车辆所有功能的标准化属性列表。汽车制造商(OEM)只需根据自家车辆的电子电气架构(EEA),实现这些属性的
get(读)和set(写)接口,即可将车辆接入AAOS的生态,无需上层应用做出任何修改。这种设计极大地简化了服务治理的复杂性。
2. 通信协议:Some/IP + CAN/LIN 实现跨域数据传输
CarService与Vehicle HAL之间,以及Vehicle HAL与各域控制器之间的通信,依赖于多种车载网络协议的紧密配合,形成一条完整的控制链路:应用层 → Car API → CarService → Vehicle HAL → 车载总线(CAN/LIN/以太网)→ 各域控制器。
- Some/IP (Scalable service-Oriented MiddlewarE over IP):这是一种基于车载以太网的面向服务通信协议,是实现跨域(如座舱域、动力域、底盘域)服务调用的核心。在AAOS中,CarService可以通过Some/IP协议调用其他域控制器提供的服务,例如导航应用通过Some/IP请求从动力域获取实时车速,以实现更加精准的动态路线规划。
- CAN/LIN总线:这是传统的车载控制总线。Vehicle HAL通过CAN总线与空调控制器、座椅控制器、门窗控制器等进行通信,发送控制指令并接收状态反馈。LIN总线则用于成本更敏感、速率要求较低的控制场景,如控制雨刮器、车窗升降等。
- Binder/共享内存:这是AAOS系统内部的进程间通信机制。CarService与应用之间通过Binder传递控制请求和事件,而CarService与Vehicle HAL之间则可能通过共享内存来传递数据量较大的信息(如完整的车辆状态快照),以保证通信效率。
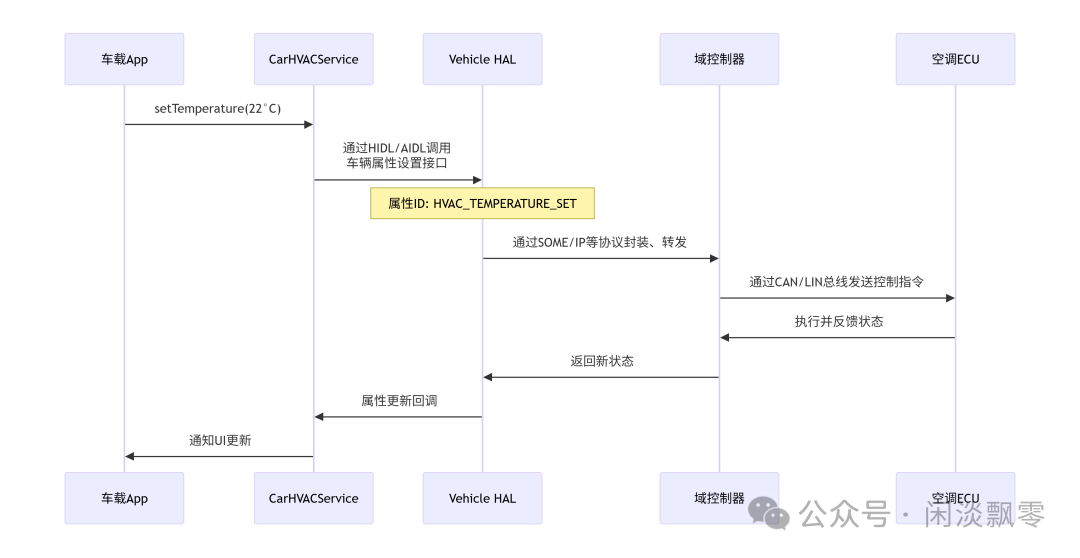
3. 典型控制场景:以调节空调温度为例
- 用户在车机中控屏的空调App上点击“温度+”按钮。
- 空调App通过Car API向CarService发送“设置空调目标温度”的请求。
- CarService将此请求翻译为标准化的
HVAC_TARGET_TEMP属性设置指令,并下发给Vehicle HAL。
- Vehicle HAL内部的实现代码将属性指令解析为符合该车型空调控制器规范的CAN报文,并通过CAN总线发送出去。
- 空调控制器接收到CAN报文,执行温度调节操作,并将当前实际温度状态通过CAN总线返回。
- Vehicle HAL收到反馈,更新内部属性值,并通知CarService。
- CarService将属性变更事件推送给所有订阅的应用(包括空调App),界面随之更新显示最新温度。
四、AAOS座舱生态面临的技术挑战
尽管AAOS架构设计优美,但在实际落地过程中仍面临一系列严峻的技术挑战:
- 算力与成本的永恒博弈:一颗高端座舱芯片(如高通8295)固然可以流畅驱动所有屏幕和AI应用,但其成本高昂。在中低端车型上,若采用算力有限的芯片运行完整的AAOS,可能难以负荷。这就需要将部分计算密集型任务(如多路环视影像合成、高品质音频处理)卸载到外置的MCU或DSP芯片上执行,这无疑增加了系统设计的复杂性和软硬件集成难度。
- 实时性与确定性的缺失:Android系统本质上是非实时操作系统。即便谷歌进行了实时性增强,要保证如倒车影像渲染、方向盘多功能按键响应等安全相关功能的绝对零延迟和高确定性,仍然非常困难。因此,许多车企会选择外挂一个硬实时的RTOS或独立MCU,专门用于处理这类安全关键功能,形成“AAOS+RTOS”的双系统方案。
- 数据一致性与可靠性:车辆状态瞬息万变。当多个应用(如数字仪表盘、车控UI组件)同时通过CarService请求获取车速时,必须确保它们获得的是同一时刻、精确无误的数值。这就要求CarService内部的事件分发、缓存同步和状态管理机制必须设计得极其健壮和高效。
- 安全与冗余设计:娱乐系统死机可以重启,但仪表盘显示和基础车控功能必须始终保持可用。为此,高端车型普遍采用“一芯多屏”或“多芯备份”的方案,利用虚拟化技术在单颗SOC上隔离出安全域,或者直接使用独立的安全岛芯片,确保在AAOS系统崩溃或重启时,关键的驾驶信息(如车速、挡位、报警灯)依然能够稳定显示。
- 功耗管理的复杂性:车载系统需要支持从全速运行到深度休眠的多级电源状态。AAOS的电源管理模块需要与整车的车身控制器(BCM)以及每一个外设的供电状态进行深度协同。任何一个外设的“异常唤醒源”管理不当,都可能导致车辆在静置时出现异常耗电,甚至引发蓄电池亏电。
总结:AAOS整合外设的核心逻辑
Android Automotive OS能够高效整合车内纷繁复杂的外设与域控设备,其核心逻辑在于实现了 “三层统一”:
- 硬件接口的统一:通过硬件抽象层(HAL)标准化了不同厂商、不同型号硬件的访问方式。
- 外设管理的统一:通过CarService、EVS Manager等系统服务,提供了集中、一致的外设管控入口。
- 跨域控制的统一:通过Some/IP、CAN等标准车载通信协议,构建了座舱域与车身、动力等其它域之间的互联互通桥梁。
这种统一的架构,不仅有效屏蔽了底层硬件的异构性,大幅降低了系统整合的难度和成本,更为实现多外设之间的深度协同与场景化联动提供了坚实基础。它使得汽车座舱得以从一颗孤立的“SOC计算核心”,真正演进为一个能够调度全局、联动内外的“智能中枢”。
 发表于 2025-12-25 06:59:43
|
查看: 309|
回复: 0
发表于 2025-12-25 06:59:43
|
查看: 309|
回复: 0
