
NVIDIA Isaac Sim 与 Isaac Lab 共同构成了机器人开发与训练的强大闭环。Isaac Sim 是一个基于 Omniverse 的高保真机器人仿真平台,它利用 GPU 加速的物理引擎,实现了对机器人及其环境的高精度、实时仿真,涵盖了物理、传感器、渲染等完整工具链。Isaac Lab 则是构建于 Isaac Sim 之上的专用强化学习框架,它为移动、操作等常见机器人任务提供了预置的环境、训练脚本和评估工具,让开发者能够快速启动和迭代 RL 训练。
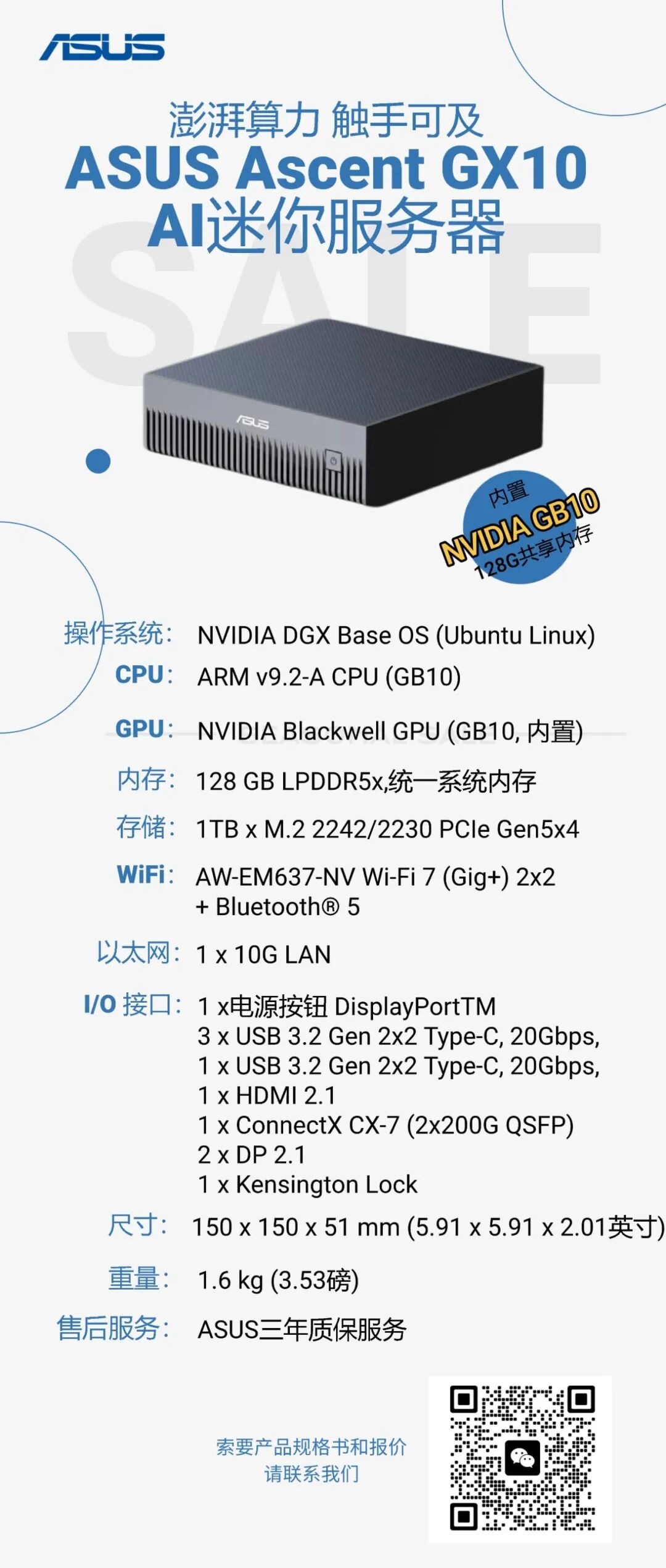
本教程将详细介绍如何在搭载 NVIDIA GB10 芯片的 ASUS Ascent GX10 AI 迷你服务器上,从源代码开始构建 Isaac Sim,并在此基础上搭建完整的 Isaac Lab 实验环境,最终通过运行示例任务来验证整套系统的有效性。
开始之前,建议你掌握 Linux 命令行操作、Git(包括 Git LFS)版本管理、Python 虚拟环境配置以及基本的 CMake 构建知识。如果你对机器人仿真有初步了解,将能更顺畅地理解后续步骤。
安装 Isaac Sim
第一步:安装 gcc-11 和 git-lfs
确保你的编译工具链使用 GCC/G++ 11 版本。
sudo apt update && sudo apt install -y gcc-11 g++-11
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-11 200
sudo update-alternatives --install /usr/bin/g++ g++ /usr/bin/g++-11 200
sudo apt install git-lfs
gcc --version
g++ --version
第二步:克隆 Isaac Sim 仓库到工作区
从官方仓库克隆 Isaac Sim,并使用 Git LFS 拉取大文件。
git clone --depth=1 --recursive https://github.com/isaac-sim/IsaacSim
cd IsaacSim
git lfs install
git lfs pull
注意:对于 Isaac Sim 6.0.0 的早期开发者版本,请使用命令 git clone --depth=1 --recursive --branch=develop https://github.com/isaac-sim/IsaacSim。
第三步:构建 Isaac Sim
执行构建脚本。这个过程可能需要较长时间,请耐心等待。
./build.sh
构建成功后,终端将显示类似 BUILD (RELEASE) SUCCEEDED (耗时 674.39 秒) 的消息。
第四步:设置 Isaac Sim 环境变量
运行以下命令前,请确保当前目录在 IsaacSim 中。
export ISAACSIM_PATH="${PWD}/_build/linux-aarch64/release"
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
第五步:运行 Isaac Sim
使用提供的启动脚本启动 Isaac Sim 应用。
export LD_PRELOAD="$LD_PRELOAD:/lib/aarch64-linux-gnu/libgomp.so.1"
${ISAACSIM_PATH}/isaac-sim.sh
安装 Isaac Lab
第一步:完成 Isaac Sim 安装
确保你已经按照上述步骤成功安装并设置了 Isaac Sim 的环境变量(ISAACSIM_PATH)。
第二步:克隆 Isaac Lab 仓库到工作区
克隆 Isaac Lab 的官方仓库。
git clone --recursive https://github.com/isaac-sim/IsaacLab
cd IsaacLab
第三步:创建指向 Isaac Sim 安装目录的符号链接
首先,确认 ISAACSIM_PATH 变量已正确设置。
echo "ISAACSIM_PATH=$ISAACSIM_PATH"
然后,创建符号链接。
ln -sfn "${ISAACSIM_PATH}" "${PWD}/_isaac_sim"
ls -l "${PWD}/_isaac_sim/python.sh"
第四步:安装 Isaac Lab
运行安装脚本。
./isaaclab.sh --install
第五步:运行验证任务
使用提供的脚本启动 Isaac Lab,并运行一个人形机器人在粗糙地形移动的强化学习训练任务进行验证。你可以选择以下两种模式之一:
选项 1: 无头模式 (建议进行更快训练)
此模式不启动图形界面,训练日志直接输出到终端,效率更高。
export LD_PRELOAD="$LD_PRELOAD:/lib/aarch64-linux-gnu/libgomp.so.1"
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Velocity-Rough-H1-v0 --headless
选项 2: 启用可视化
此模式将启动 Isaac Sim 的可视化界面,你可以实时观察机器人的训练过程。
export LD_PRELOAD="$LD_PRELOAD:/lib/aarch64-linux-gnu/libgomp.so.1"
./isaaclab.sh -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Velocity-Rough-H1-v0
至此,你已经在 ASUS Ascent GX10 上成功搭建了从仿真到训练的全套 Isaac 机器人开发环境。接下来,你可以探索 Isaac Lab 中提供的更多示例,或开始为你自己的机器人任务设计和训练智能体。如果在部署过程中遇到问题,可以到云栈社区的相关板块与更多开发者交流讨论。
 发表于 2026-1-25 11:10:51
|
查看: 240|
回复: 0
发表于 2026-1-25 11:10:51
|
查看: 240|
回复: 0
