一、功能安全简介
在汽车电子电气系统开发中,我们常常听到两个核心概念:功能安全和预期功能安全。
- 功能安全 (Functional Safety, FuSa ISO 26262):旨在消除因车载E/E系统的不合理故障风险,导致对相关人员(如驾驶员、乘客、行人)的危害超出可接受范围。
- 预期功能安全 (Safety of the Intended Functionality, SoTIF ISO 21448):旨在消除在设计运行条件 (ODC) 内,由于系统自身性能局限或人员误用所导致的危害超出可接受范围。

简单来说,功能安全主要应对“系统出故障了怎么办”,而预期功能安全则关注“系统没故障,但能力不够或被人用错了怎么办”。两者的目标都是通过系统性的设计和验证流程,将风险控制在可接受的范围内。
基于功能安全标准(如ISO 26262)的开发流程,通常从整车层面的危害分析与风险评估 (HARA) 开始,确定安全目标和安全状态,然后逐级分解至系统、硬件和软件设计,形成具体的安全需求和方案。
二、功能安全关键参数的作用
在进行安全分析和设计时,为了确保系统能达到预设的“安全状态”或“最小风险状态”,我们需要确定一系列关键的安全参数。这些参数是安全机制设计的核心依据,例如:
- FTTI (Fault Tolerant Time Interval) 故障容错时间间隔:系统从检测到故障到进入安全状态所允许的最长时间。
- 角度控制阈值:转向系统在安全范围内的最大允许转角。
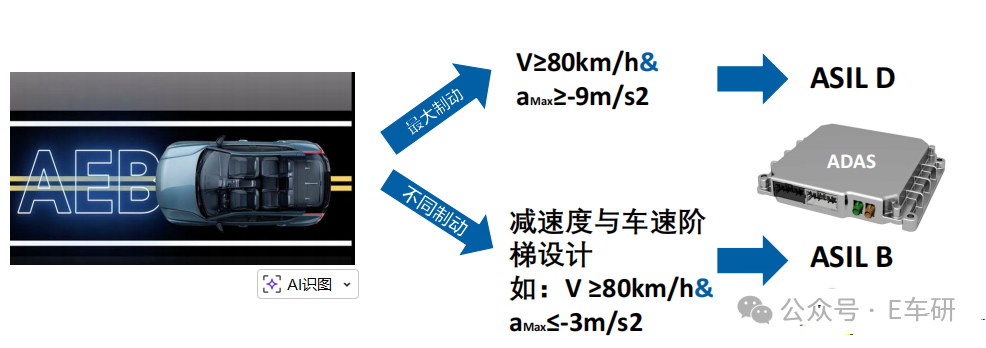
- 减速度阈值:制动系统在紧急情况下需要达到的最低减速度。
- 碰撞发生时的 ∆V (速度变化量):用于评估碰撞严重程度的关键物理量。

这些关键参数直接影响系统的安全分析与设计。例如,一个精确的FTTI参数可以帮助我们优化控制策略,有时甚至能降低对某些子系统或元器件的要求等级(ASIL等级),从而在保证安全的前提下,更好地平衡安全设计与成本。
三、关键参数确定方法介绍与优劣势对比
如何获得这些至关重要的安全参数呢?在实际开发中,常见的方法有三种:理论模型计算、仿真测试和实车测试。在项目前期,由于成本和时间的限制,通常优先采用理论计算或仿真测试。

1. 模型计算方法介绍
这种方法基于整车的HARA分析,梳理出典型的危险场景用例,并结合具体的失效模式,进行数学建模和计算。
纵向控制举例(跟车场景)
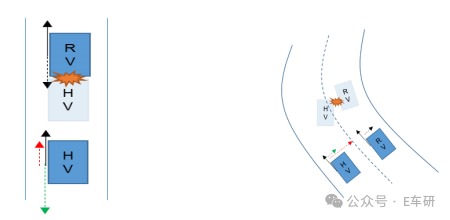
假设场景:跟车行驶中,前车突然减速,本车因非预期加速故障而撞上前车。
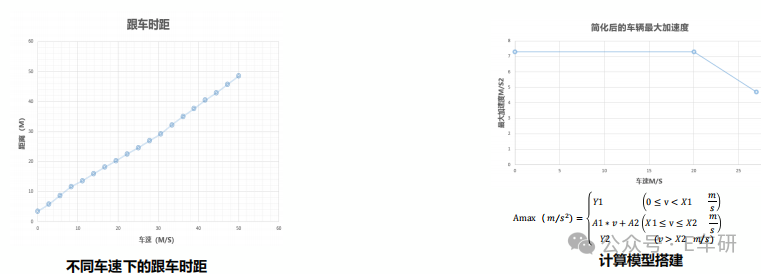
我们需要构建纵向加减速计算模型。例如,通过分析不同车速下的安全跟车时距,来计算避免碰撞所需的最小减速度或最大反应时间。
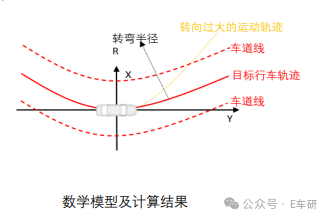
横向控制举例(弯道场景)
假设场景:车辆在弯道行驶时,转向系统发生故障导致转角过大,车辆偏离本车道撞上邻车道车辆。
我们需要构建横向运动学模型。通过设定车辆质量、转弯半径、路面附着系数等参数,计算在失效情况下,车辆偏离车道并发生碰撞的时间或距离边界。
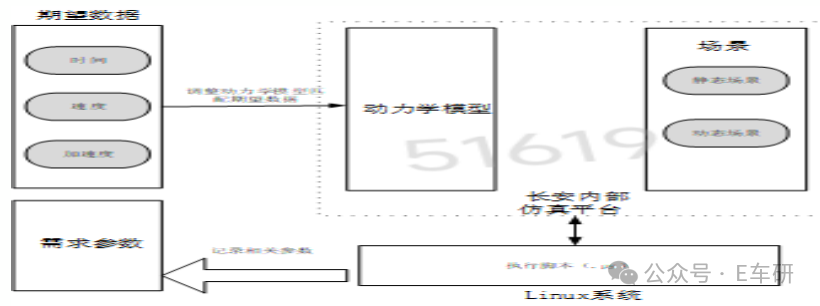
2. 仿真测试方法介绍
这种方法比纯理论计算更进一步,它依据车辆的动力学模型,在虚拟环境中构建危险工况场景,并运行测试脚本以获取更贴近实际的参数。搭建一个有效的动力学模型是仿真准确性的基础。
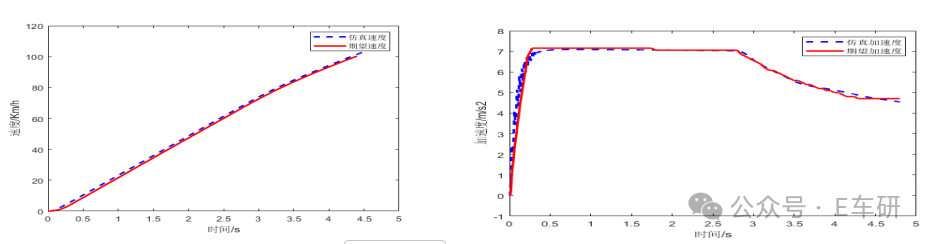
测试举例
基于搭建的仿真模型和测试脚本,可以对前述的危险场景1和2进行仿真。通过注入相应的故障(如非预期加速、转向卡滞),观察系统响应,并记录车辆状态数据,从而获得更精确的FTTI等参数。这个过程往往需要反复调节模型参数,使仿真结果趋于合理。
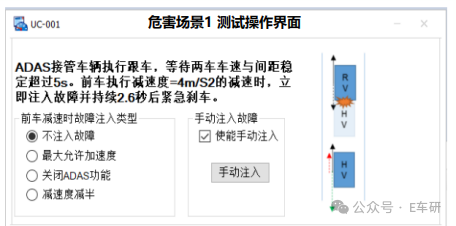
3. 实车测试方法介绍
这是最直接但也最昂贵和复杂的方法。需要搭建实车功能安全测试平台,编写专用的测试用例和可视化操作界面。在专用的封闭测试场地,基于HARA分析出的场景,向真实的车辆系统注入故障(如通过CAN总线模拟传感器失效),同时严密监控整车总线数据与车辆状态,从而确定关键安全参数。
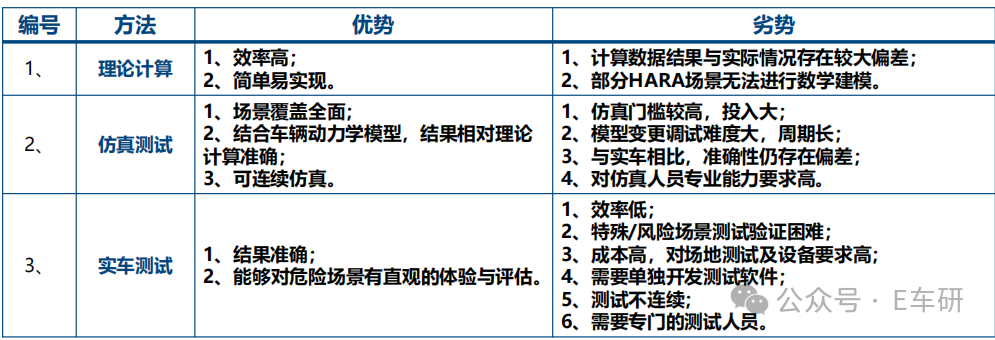
方法对比总结
下表对三种方法的优劣势进行了详细对比:
四、基于实车测试补偿的仿真平台介绍
从上面的对比可以看出,仿真测试在效率、成本和场景覆盖面上具有显著优势,但其准确性依赖于模型的精度。那么,能否结合实车测试的“准”和仿真测试的“快”呢?
答案是肯定的。一种高效的实践路径是:构建以高精度仿真为核心,并用实车测试数据对仿真模型进行校准和补偿的验证平台。这样既能大幅提升仿真结果的可信度,又能避免纯实车测试的高成本和长周期问题。

这样构建的平台,其应用范围可以非常广泛,不仅限于FTTI的确认,还包括:
- 各类安全边界参数确认:如纵向安全距离、横向控制边界、执行器作动限值等。
- 安全机制有效性评价:验证在故障注入下,系统是否能按照设计切换到安全状态(如报警、降级、靠边停车等)。
- 预期功能安全 (SOTIF) 场景验证:对感知、决策算法的性能局限在虚拟环境中进行大规模测试。

五、总结
在自动驾驶与智能网联汽车快速发展的今天,功能安全与预期功能安全的重要性日益凸显。通过采用“实车测试数据补偿仿真模型”的融合方法,我们能够以较高的效率获得相对准确的关键安全参数。这为后续准确设定系统ASIL等级、设计经济有效的安全机制提供了强有力的数据支撑。
同时,这样一个经过校准的仿真验证平台,其价值可以复用到整车其他电子电气系统的安全分析与设计中,形成一个持续积累和优化的正向循环。对于未来更复杂的预期功能安全测试验证,它也将成为一个不可或缺的基础设施。在像云栈社区这样的技术论坛中,开发者们经常分享和讨论如何构建与优化此类复杂的仿真测试环境。
 发表于 2026-2-9 08:14:10
|
查看: 228|
回复: 0
发表于 2026-2-9 08:14:10
|
查看: 228|
回复: 0
