在当前的AI浪潮中,无论是开源还是闭源的大模型都找到了各自的商业定位和应用场景。对于工业自动化领域的PLC编程工程师而言,如何在众多选择中找到免费且实用的AI辅助工具,成为了一个实际需求。
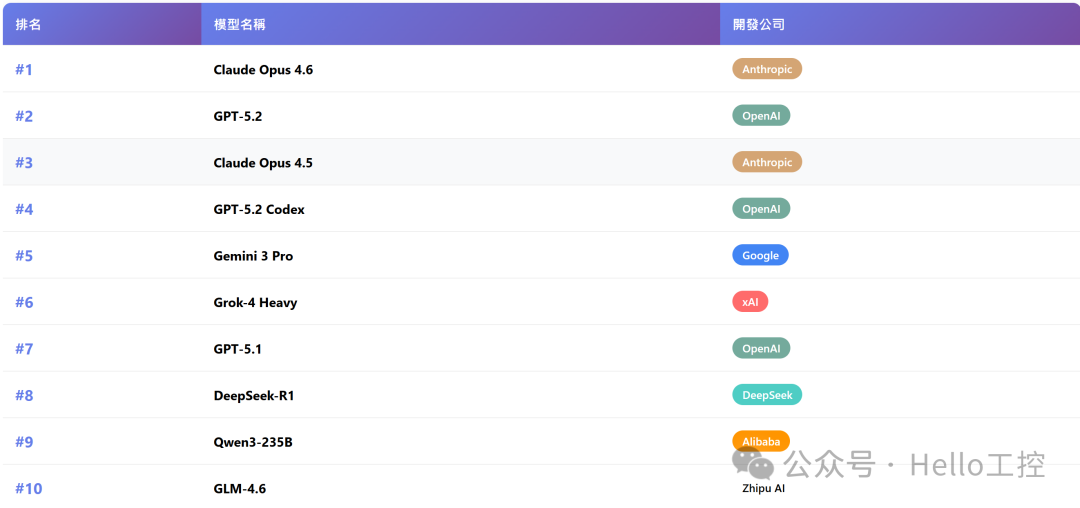
在通用IT编程领域,Claude系列模型表现突出。但在PLC编程这个相对垂直的领域,目前并没有专用的“最强模型”。我们此前的社区调查也显示,开发者们使用的模型非常分散。

不过,排行榜上的顶尖模型大多能找到免费的替代或体验方案。对于PLC编程的日常辅助任务,这些免费模型的能力已经足够。更重要的是,我们始终认为,最适合特定领域的最强模型,最终需要基于领域数据训练而成。
本文将分享三个切实可用的免费大模型方案,并辅以实际的PLC编程测试,希望能帮助你找到合适的AI编程伙伴。
方案一:OpenRouter——模型聚合与比测平台
对于国内开发者,直接访问Claude、Google Gemini等国外模型可能存在网络限制。常见的解决方案是使用API中转服务,OpenRouter便是一个优秀的聚合平台,汇集了众多可免费使用的模型。
官网地址:https://openrouter.ai/
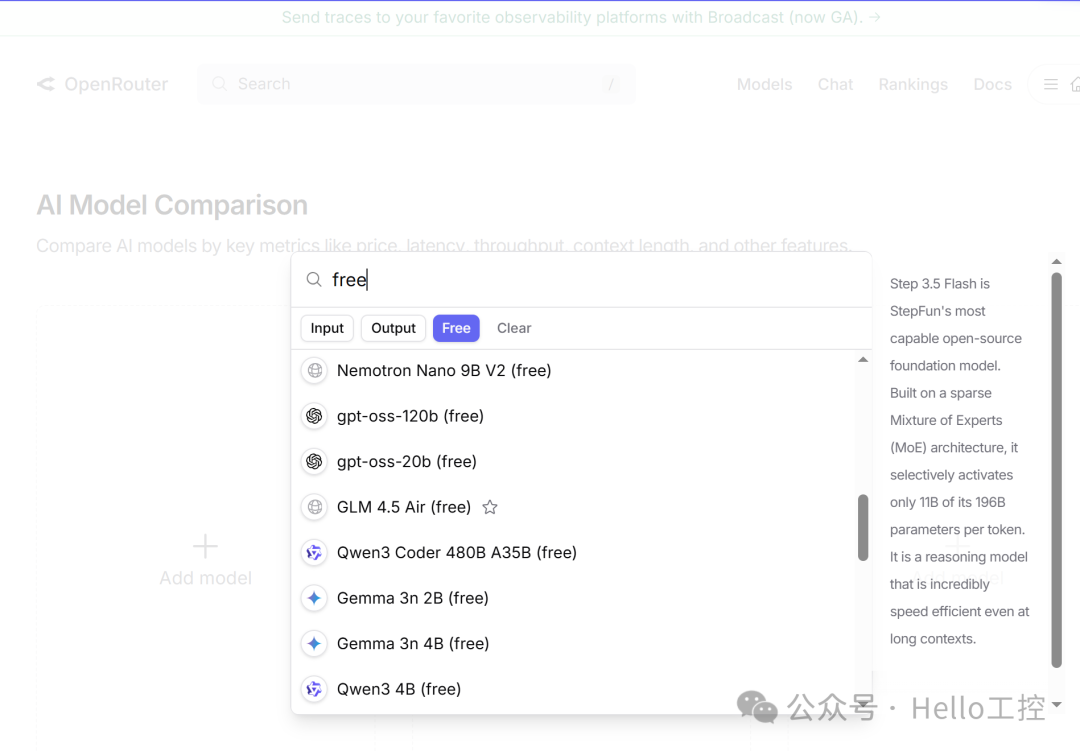
在OpenRouter上,你可以将同一个问题(例如编写PLC代码)同时提交给多个免费模型,直观地比较它们的输出质量和风格。
接下来,我们以“以交通灯为例写一段ST PLC代码,突出简洁性和专业性”为指令,看看不同模型的表现。
1. DeepSeek R1(0528)的输出
该模型生成了一段采用状态机结构的交叉路口交通灯控制代码,并附有详细的设计说明。
以下是一段简洁且专业的交通灯控制ST(结构化文本)PLC代码示例。代码采用状态机zhihu结构,突出可读性和可维护性:
```pascal
// Traffic Light Control System
// States: NS_Green, NS_Yellow, EW_Green, EW_Yellow
VAR
ton: TON; // Timer function block
currentState: INT := 0; // 0=NS_Green, 1=NS_Yellow, 2=EW_Green, 3=EW_Yellow
END_VAR
// Output assignments (assuming digital outputs)
OUTPUT(
NS_Red := NOT(currentState IN {0,1}), // North-South
NS_Yellow := (currentState = 1),
NS_Green := (currentState = 0),
EW_Red := NOT(currentState IN {2,3}), // East-West
EW_Yellow := (currentState = 3),
EW_Green := (currentState = 2)
);
// State machine logic
CASE currentState OF
0: // NS_Green (North-South Green)
ton(IN := TRUE, PT := T#30S);
IF ton.Q THEN
currentState := 1;
ton(IN := FALSE);
END_IF
1: // NS_Yellow
ton(IN := TRUE, PT := T#5S);
IF ton.Q THEN
currentState := 2;
ton(IN := FALSE);
END_IF
2: // EW_Green (East-West Green)
ton(IN := TRUE, PT := T#30S);
IF ton.Q THEN
currentState := 3;
ton(IN := FALSE);
END_IF
3: // EW_Yellow
ton(IN := TRUE, PT := T#5S);
IF ton.Q THEN
currentState := 0;
ton(IN := FALSE);
END_IF
END_CASE
```
2. Aurora Alpha 的输出
该模型同样采用状态机,但提供了单组红黄绿灯的控制逻辑,代码结构清晰,注释详尽。
以下是一段 **简洁且专业** 的 **Structured Text(ST)** 代码示例,实现了一个基本的 **交通灯控制**(红‑黄‑绿)逻辑。代码采用了 **状态机** 的写法,结构清晰、易于维护,并且遵循 IEC 61131‑3 标准。
<details>
<summary>🟢 代码概览</summary>
```st
PROGRAM TrafficLight
VAR
// 时间计数器(单位:毫秒)
tTimer : TIME := T#0ms;
// 当前灯状态
eState : (Red, RedYellow, Green, Yellow);
// 状态持续时间
tRed : TIME := T#5s;
tRedYellow : TIME := T#2s;
tGreen : TIME := T#5s;
tYellow : TIME := T#2s;
END_VAR
// 主循环,每个 PLC 扫描周期执行一次
CASE eState OF
Red:
// 红灯保持
IF tTimer >= tRed THEN
tTimer := T#0ms;
eState := RedYellow;
END_IF;
RedYellow:
// 红黄灯保持
IF tTimer >= tRedYellow THEN
tTimer := T#0ms;
eState := Green;
END_IF;
Green:
// 绿灯保持
IF tTimer >= tGreen THEN
tTimer := T#0ms;
eState := Yellow;
END_IF;
Yellow:
// 黄灯保持
IF tTimer >= tYellow THEN
tTimer := T#0ms;
eState := Red;
END_IF;
END_CASE;
// 计时器递增(假设 PLC 扫描周期为 100 ms)
tTimer := tTimer + T#100ms;
// 输出映射:根据状态控制实际灯
RedLamp := (eState = Red) OR (eState = RedYellow);
YellowLamp:= (eState = RedYellow) OR (eState = Yellow);
GreenLamp := (eState = Green);
```
</details>
3. GLM Air 4.5 的输出
这个模型输出了一个完整的函数块(FB),功能更为复杂,包含了绿灯和红灯的闪烁过渡阶段,模块化程度高。
# 交通灯控制 - ST PLC代码
```st
FUNCTION_BLOCK "Traffic_Light_Control"
{ S7_Optimized_Access := 'TRUE' }
VERSION : 0.1
VAR_INPUT
Run : Bool; // 启动信号
T_Green : Time := T#30S; // 绿灯持续时间
T_Yellow : Time := T#3S; // 黄灯持续时间
T_Red : Time := T#30S; // 红灯持续时间
Blink_Count : Int := 3; // 闪烁次数
END_VAR
VAR_OUTPUT
Q_Red : Bool; // 红灯输出
Q_Yellow : Bool; // 黄灯输出
Q_Green : Bool; // 绿灯输出
END_VAR
VAR
State : Int := 0; // 状态机状态
Blink_Timer : TON; // 闪烁计时器
Phase_Timer : TON; // 阶段计时器
Blink_Counter : Int := 0; // 闪烁计数器
END_VAR
// 状态机控制逻辑
CASE State OF
0: // 状态0: 绿灯亮
Q_Green := TRUE;
Phase_Timer(IN := Run, PT := T_Green);
IF Phase_Timer.Q THEN
State := 1;
Phase_Timer(IN := FALSE);
END_IF;
1: // 状态1: 绿灯闪烁
Blink_Timer(IN := TRUE, PT := T#1S);
IF Blink_Timer.Q THEN
Blink_Counter := Blink_Counter + 1;
Blink_Timer(IN := FALSE);
Q_Green := NOT Q_Green;
IF Blink_Counter >= Blink_Count THEN
State := 2;
Blink_Counter := 0;
END_IF;
END_IF;
2: // 状态2: 黄灯亮
Q_Yellow := TRUE;
Phase_Timer(IN := Run, PT := T_Yellow);
IF Phase_Timer.Q THEN
State := 3;
Phase_Timer(IN := FALSE);
END_IF;
3: // 状态3: 红灯亮
Q_Red := TRUE;
Phase_Timer(IN := Run, PT := T_Red);
IF Phase_Timer.Q THEN
State := 4;
Phase_Timer(IN := FALSE);
END_IF;
4: // 状态4: 红灯闪烁
Blink_Timer(IN := TRUE, PT := T#1S);
IF Blink_Timer.Q THEN
Blink_Counter := Blink_Counter + 1;
Blink_Timer(IN := FALSE);
Q_Red := NOT Q_Red;
IF Blink_Counter >= Blink_Count THEN
State := 0;
Blink_Counter := 0;
Q_Red := FALSE;
END_IF;
END_IF;
ELSE: // 默认状态
State := 0;
END_CASE;
// 当系统停止时复位所有输出
IF NOT Run THEN
Q_Red := FALSE;
Q_Yellow := FALSE;
Q_Green := FALSE;
State := 0;
Blink_Counter := 0;
Phase_Timer(IN := FALSE);
Blink_Timer(IN := FALSE);
END_IF;
END_FUNCTION_BLOCK
```
此外,平台上还有一些支持图像输出的模型(如FLUX、Seedream),它们可以根据指令生成逻辑示意图或代码截图。
具体哪个模型更适合你的编程习惯和项目需求,还需要自己动手实践和比较。通过 OpenRouter 这样的平台,我们可以高效地对比各类开源实战项目的模型表现。
方案二:GitHub Copilot(VS Code 插件)
对于已经使用 Visual Studio Code 的开发者,GitHub Copilot 插件提供了一个便捷的免费通道。绑定 GitHub 账户后,可以在 VS Code 内直接使用多个指定的免费模型。
登录 GitHub:https://github.com/
在个人 Settings -> Developer Settings 中,可以管理 Personal access tokens (classic)。
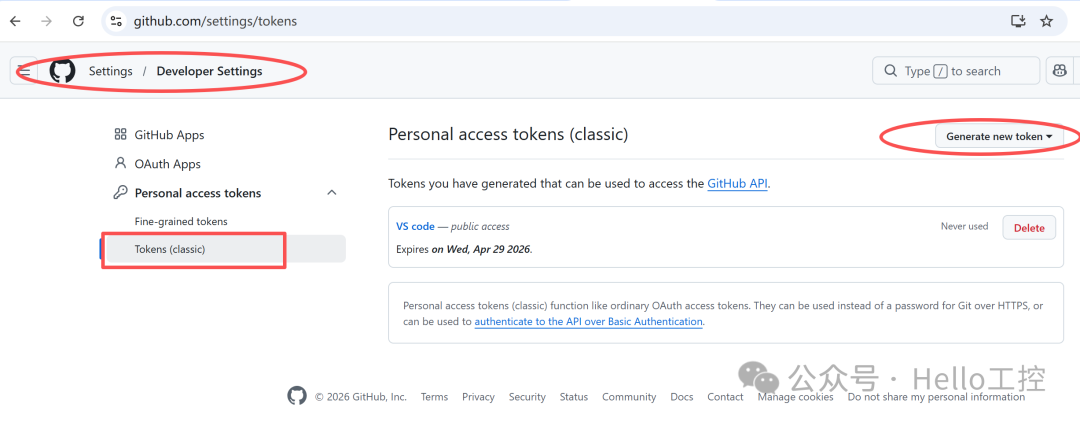
将生成的 Token 配置到支持 Copilot 协议的客户端(例如某些开源代码助手)后,即可免费使用包括 GPT-4o mini 在内的模型。
基本上,拥有 GitHub 账户的用户就可以免费体验这几款模型,对于集成在开发环境中的辅助编程非常方便。
方案三:NVIDIA API 平台
另一个重量级的免费方案来自 NVIDIA。通过其 AI 构建平台,开发者可以获取 API Key 来调用一系列领先的人工智能模型。
首先访问官网:https://build.nvidia.com/
使用账户登录后,在控制台找到 API Keys 管理页面,创建一个新的 API Key。
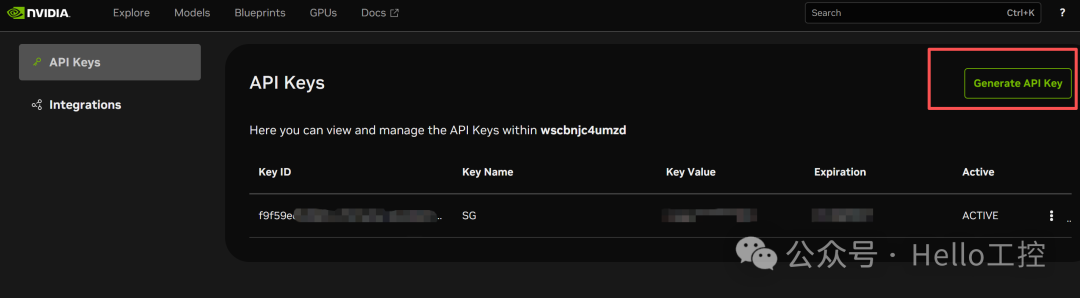
请注意,这个 Key 需要妥善保管,避免暴露在公开场合。 获得 Key 后,将其填入你使用的编程环境或工具中,就可以调用 NVIDIA 平台上的丰富模型了。
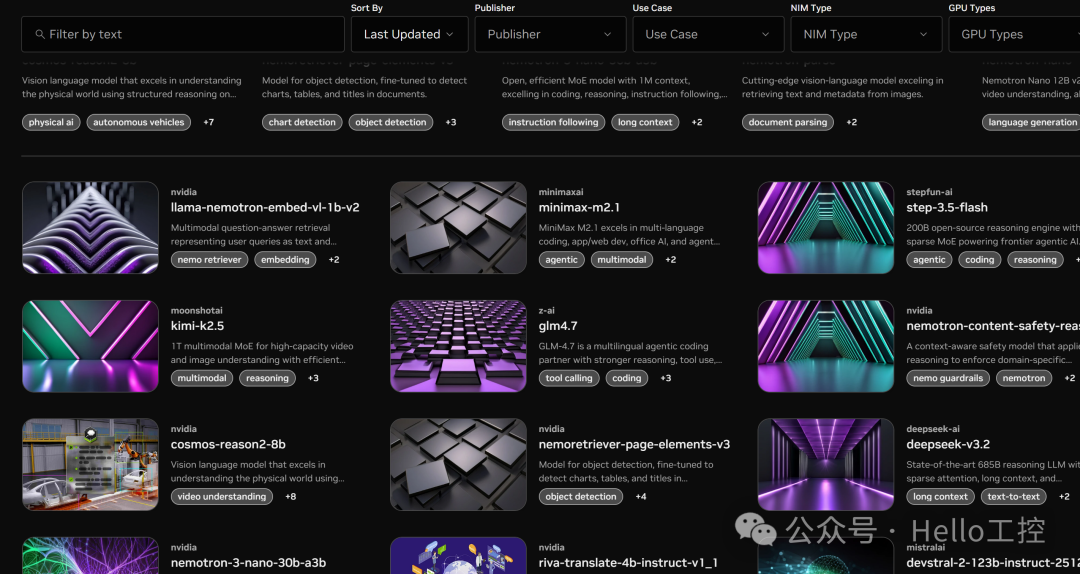
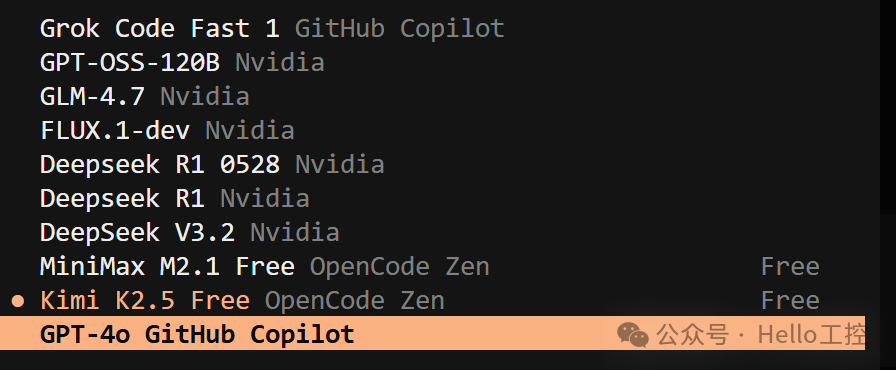
例如,在配置了该 API 的代码助手中,你可以看到并选择诸如 GPT-OSS-120B 这样的模型。
我们再次用交通灯PLC代码的问题来测试 GPT-OSS-120B 模型。

模型生成了一段结构清晰、使用枚举类型定义状态的专业代码。
PROGRAM TrafficLightControl
VAR
(* Enum for light states *)
LightState : (Red, RedYellow, Green, Yellow) := Red;
(* Timer for each phase, preset in ms *)
PhaseTimer : TON; (* Standard ON-delay timer *)
PhaseTime : TIME := T#5s; (* Default duration, can be overridden per state *)
END_VAR
(*--------------------------------------------------------------*)
(* Main cyclic logic *)
(*--------------------------------------------------------------*)
IF NOT PhaseTimer.IN THEN
(* Start timer for current state *)
PhaseTimer(IN := TRUE, PT := PhaseTime);
ELSE
(* When timer elapsed, transition to next state *)
IF PhaseTimer.Q THEN
PhaseTimer(IN := FALSE); (* Reset timer *)
CASE LightState OF
Red: (* Red -> Red+Yellow *)
LightState := RedYellow;
PhaseTime := T#2s; (* Short transition *)
RedYellow: (* Red+Yellow -> Green *)
LightState := Green;
PhaseTime := T#5s; (* Green duration *)
Green: (* Green -> Yellow *)
LightState := Yellow;
PhaseTime := T#2s; (* Yellow duration *)
Yellow: (* Yellow -> Red, cycle repeats *)
LightState := Red;
PhaseTime := T#5s; (* Red duration *)
END_CASE;
END_IF;
END_IF;
(*--------------------------------------------------------------*)
(* Output assignments (example mapping to physical outputs) *)
(*--------------------------------------------------------------*)
CASE LightState OF
Red:
RED_LIGHT := TRUE;
YELLOW_LIGHT := FALSE;
GREEN_LIGHT := FALSE;
RedYellow:
RED_LIGHT := TRUE;
YELLOW_LIGHT := TRUE;
GREEN_LIGHT := FALSE;
Green:
RED_LIGHT := FALSE;
YELLOW_LIGHT := FALSE;
GREEN_LIGHT := TRUE;
Yellow:
RED_LIGHT := FALSE;
YELLOW_LIGHT := TRUE;
GREEN_LIGHT := FALSE;
END_CASE;
END_PROGRAM
总结
以上介绍了三种获取和免费使用大模型辅助PLC编程的可行路径。从模型聚合平台OpenRouter,到集成在IDE中的GitHub Copilot,再到提供强大算力模型的NVIDIA平台,各有侧重。
在AI技术蓬勃发展的当下,建议工程师们从这些免费方案入手,亲身体验AI在代码生成、逻辑建议方面的能力。通过实际使用,逐步适应并掌握如何与AI协作,从而提升编程效率和质量。最终,结合领域知识筛选出最适合自己的工具,甚至为训练专有模型积累经验。希望这篇指南能为你提供清晰的入门参考,更多深入的技术文档和实践欢迎在技术社区交流探讨。
参考链接:
- https://openrouter.ai/
- https://github.com
- https://build.nvidia.com/
 发表于 2026-2-13 06:37:36
|
查看: 299|
回复: 0
发表于 2026-2-13 06:37:36
|
查看: 299|
回复: 0
