蜂鸣器作为电路设计中常用的报警或提示器件,广泛应用于工业控制、门禁系统、计算机设备等场景。其驱动电路通常被认为非常简单,但许多人在设计时往往掉以轻心,导致实际产品中出现蜂鸣器不响、声音微弱或误触发鸣叫等问题。
本文将以3.3V供电下,使用NPN三极管驱动有源蜂鸣器的设计为例,从实际产品中分析常见电路设计的缺陷,并提供改进与优化方案。希望通过这个具体的案例,能帮助你掌握电路分析与改进的基本方法,从而设计出更可靠、更优秀的产品。
常见错误接法
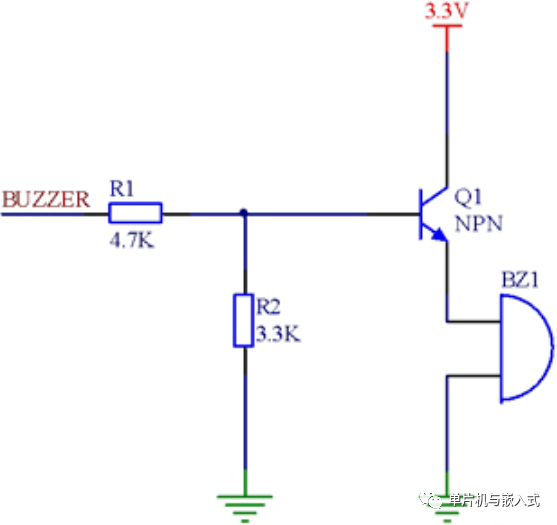
上图展示了一种典型的错误接法。当控制端 BUZZER 输入高电平时,蜂鸣器可能不响或响声太小。原因在于:当I/O口输出高电平(3.3V)时,基极电压由R1和蜂鸣器内阻分压,约为 3.3V / 4.7 * 3.3V ≈ 2.3V。考虑到三极管BE结的压降(约0.6V~0.7V),发射极电压仅为 2.3V - 0.7V = 1.6V。这个驱动电压太低,无法有效驱动蜂鸣器,导致其无法工作或声音微弱。
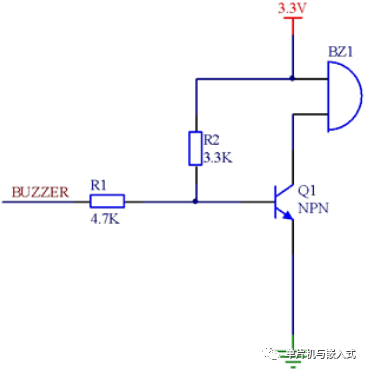
上图是第二种典型错误。由于上拉电阻R2的存在,当 BUZZER 端试图输出低电平来关闭三极管时,会与电阻R1形成一个分压网络,使得三极管基极电压无法被可靠地拉到低电平,从而导致三极管不能彻底关断。
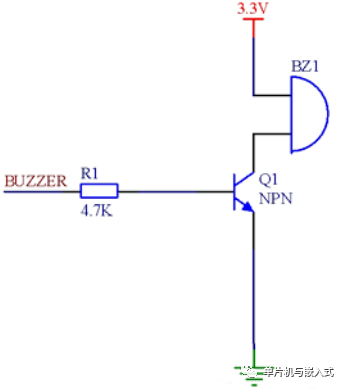
第三种错误接法如上图所示。在这种电路中,三极管导通的高电平门槛电压仅有约0.7V(即BE结压降)。这意味着只要 BUZZER 端的输入电压超过0.7V,三极管就有可能导通。对于数字电路环境来说,0.7V的抗干扰门槛实在太低,在存在电磁干扰的情况下,极易造成蜂鸣器的误触发鸣叫。
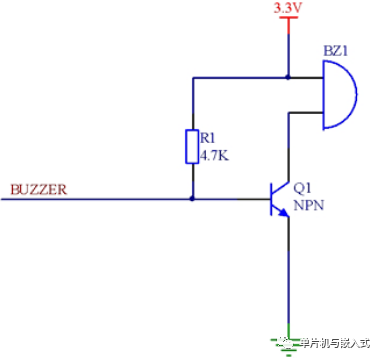
第四种错误接法如上图所示。当微控制器GPIO管脚内部存在下拉电阻时,由于其输入阻抗的影响,也可能导致三极管无法可靠关断。同时,这种电路和图三存在相同的问题:导通门槛电压过低(约0.7V),抗干扰能力差。
综合来看,以上几种电路并非完全不可用,但它们对器件参数(如β值、蜂鸣器内阻)的要求较为苛刻,不利于器件的广泛选型,并且电路的抗干扰性能和可靠性都比较差。
NPN三极管控制有源蜂鸣器常规设计
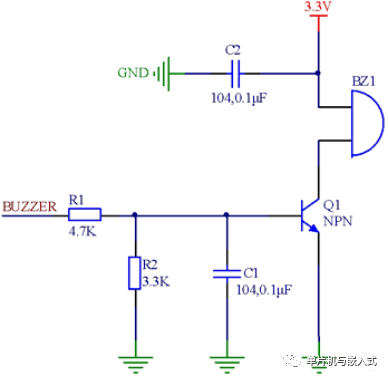
上图是一个通用性更好的有源蜂鸣器驱动电路。我们来分析一下各个元件的作用:
- 电阻R1:这是一个限流电阻,主要作用是防止流入三极管基极的电流过大,从而保护三极管不被损坏。
- 电阻R2:这个电阻扮演着两个关键角色。
- 下拉电阻作用:R2确保了当
BUZZER 控制端悬空(例如MCU未初始化或故障)时,三极管的基极能被可靠地拉到低电平(GND),使三极管保持在确定的关断状态,防止因干扰导致的意外导通。
- 提升抗干扰门槛:如果没有R2,三极管的导通门槛电压就是0.7V。加入R2后,情况就不同了。它和R1形成了一个分压网络,显著提高了使三极管饱和导通所需的输入电压。
让我们具体计算一下这个门槛电压:
假设晶体管的最小电流放大系数 β = 120,蜂鸣器的导通电流为 15mA。
那么集电极电流 IC = 15mA。
三极管刚达到饱和导通时所需的基极电流 IB = IC / β = 15mA / 120 = 0.125mA。
流经下拉电阻R2的电流 I_R2 = 0.7V / 3.3kΩ ≈ 0.212mA。
因此,流经限流电阻R1的电流 I_R1 = I_R2 + IB = 0.212mA + 0.125mA = 0.337 mA。
最后,可以计算出 BUZZER 端的门槛电压为:0.7V + I_R1 × R1 = 0.7V + 0.337mA × 4.7kΩ ≈ 2.28V。
可以看到,输入电压需要达到约2.3V,三极管才会饱和导通,这大大增强了电路抵抗噪声干扰的能力。
- 电容C1与C2:
- C2 是电源滤波电容,用于滤除电源线上的高频杂波,为电路提供清洁的电源。
- C1 则用于在有强干扰的环境下,有效滤除可能通过控制线串入的干扰信号,避免蜂鸣器发声异常(变音)或误触发。在RFID、Mifare卡等射频应用场合尤其有用。这里初步选用
0.1uF(104)的电容,具体容量可根据实际干扰情况调整。
相关文章:深度讲解三极管和MOS管下拉电阻的作用。
改进方案:解决蜂鸣器自身的EMI问题
你可能会惊讶:蜂鸣器本身也会产生EMI辐射?是的,在实际测试NPN三极管驱动3.3V有源蜂鸣器电路时发现,当 BUZZER 输入保持高电平让蜂鸣器持续鸣叫,在其输入管脚(三极管集电极C极)可以检测到蜂鸣器自身产生的脉冲信号。
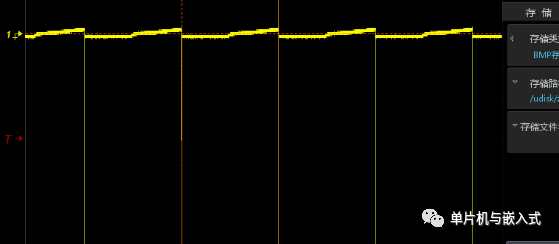
上图显示,蜂鸣器发声时,向外辐射了一个频率约为 1.87KHz、幅度约 -2.91V 的脉冲信号。
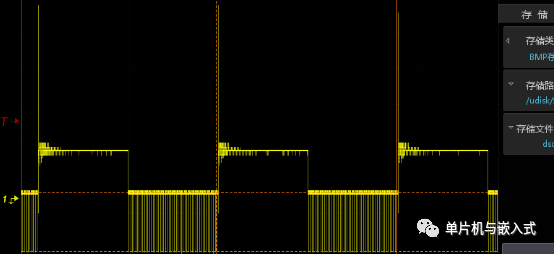
更进一步,当 BUZZER 端输入一个 20Hz 的方波信号来控制蜂鸣器间歇鸣叫时,测量发现:在控制信号的高电平期间,叠加了同样的 1.87KHz、-2.92V 的脉冲;而在控制信号从高变低、蜂鸣器关断的瞬间,出现了一个正向的尖峰脉冲,其电压甚至可能 ≥10V。
这个 1.87KHz 的脉冲信号很可能来源于有源蜂鸣器内部的振荡电路。常见的有源蜂鸣器分为压电式和电磁振荡式,测试所用的压电式蜂鸣器内部含有多谐振荡器(由晶体管或集成电路构成),这个内部电路工作时产生了泄漏信号。关断时的高压尖峰则是感性负载(蜂鸣器内部的线圈或压电陶瓷的等效电感)突然断电产生的反向电动势。
这些信号虽然能量不大,但可能干扰周围敏感电路。一个有效的改进方法是在蜂鸣器两端并联一个滤波电容。
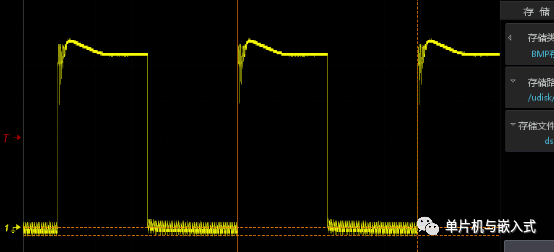
如上图所示,在蜂鸣器两端并联一个 0.1uF(104)的电容后,其自身产生的脉冲信号幅度被削减到了约 -110mV,效果显著。需要注意的是,电容会减缓蜂鸣器供电的上升沿,导致发声起始略有延迟,但这在大多数应用中是可以接受的。
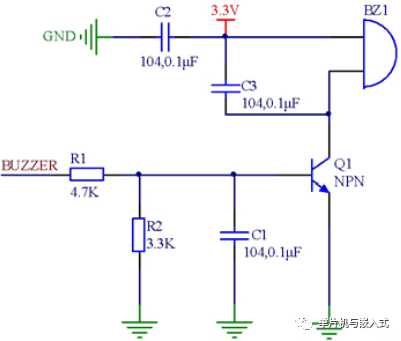
综合以上改进,优化后的电路图如上所示,主要增加了并联在蜂鸣器两端的滤波电容 C3,以抑制其自身产生的EMI干扰。
兼容性设计考虑
一个优秀的标准电路还需要考虑兼容性问题,例如适配不同功率的有源蜂鸣器,乃至兼容有源和无源蜂鸣器。
兼容同样耐压不同功率的有源蜂鸣器
为了增强电路的通用性,我们希望同一个驱动电路能够适配不同厂家、不同功率但耐压相同(如3V-5V)的有源蜂鸣器。这些蜂鸣器的主要差异在于内阻和工作电流,导通电流范围可能在 10mA 到 80mA 之间。
设计原则是:按照可能用到的最大功率(即最大工作电流)的蜂鸣器来设计驱动电路。这里我们以 80mA 为例重新计算基极限流电阻R1。
假设条件:
- 晶体管最小
β = 120
- 蜂鸣器最大导通电流
IC = 80 mA
- 目标门槛电压仍设定在约
2.2V
计算过程:
- 所需基极电流
IB = IC / β = 80mA / 120 ≈ 0.667mA。
- 流经下拉电阻R2的电流
I_R2 = 0.7V / 3.3kΩ ≈ 0.212mA。
- 因此,需要流经R1的电流
I_R1 = IB + I_R2 = 0.667mA + 0.212mA = 0.879mA。
- 根据目标门槛电压2.2V和BE结压降0.7V,可得R1两端的压降为
2.2V - 0.7V = 1.5V。
- 计算R1阻值:
R1 = 1.5V / 0.879mA ≈ 1.71kΩ。为留有余量并取常规值,可选择 2kΩ 的电阻。
这样,当更换功率较小的蜂鸣器时,电路依然可以正常工作(三极管会进入更深的饱和状态)。如果需要驱动功率更大的蜂鸣器,可以依据此方法重新计算R1的值。
兼容有源蜂鸣器和无源蜂鸣器
在项目开发中,需求可能会变更。例如,前期使用发声频率固定的有源蜂鸣器,后期可能需要更换为可由PWM控制音调的无源蜂鸣器。如果电路设计时未做兼容考虑,就不得不修改原理图甚至PCB,增加成本与风险。
有源蜂鸣器与无源蜂鸣器驱动电路的一个关键区别在于:无源蜂鸣器本质上是一个感性元件。当流过它的电流突然变化(特别是关断时),会产生很高的反向感应电动势(尖峰电压)。这个尖峰电压可能高达几十伏,极易损坏驱动三极管,并干扰整个电路系统。
因此,驱动无源蜂鸣器必须增加续流二极管,为关断瞬间的感应电流提供释放回路,从而钳位电压,保护驱动管。二极管的选择需注意:电路工作电压高,要选耐压值大的二极管;电路开关频率高,则要选用高速开关二极管。下图所示电路选用的是常见的开关二极管 IN4148。
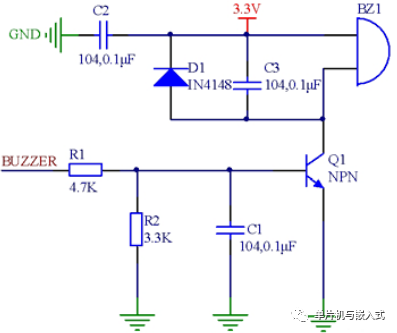
如上图所示,在蜂鸣器两端反向并联一个续流二极管D1,就构成了一个能同时兼容有源和无源蜂鸣器的驱动电路。当驱动有源蜂鸣器时,二极管在绝大多数时间内不工作;当驱动无源蜂鸣器时,二极管则起到至关重要的保护作用。这样的设计极大地提高了电路的灵活性和项目的可维护性。
 发表于 2026-2-24 02:07:41
|
查看: 590|
回复: 0
发表于 2026-2-24 02:07:41
|
查看: 590|
回复: 0
