先做个思维实验,想想你身边有哪些东西需要“记住自己转了多少圈”:
- 老式保险箱密码锁:右转3圈到25,左转2圈到50,右转1圈到10,啪,开了。
- 自行车里程表:轮子每转一圈就记一次,累计算出你骑了多远。
- 电动升降桌:你调到合适高度,关机后第二天开机,它还在那个高度。
- 工业机械臂:关节必须随时知道自己在什么角度,否则可能撞坏工件甚至伤人。
- 智能升降吊灯:卷线放下来,断电后重新上电,必须知道灯现在在什么高度。
这些看似毫不相关的场景,背后都指向同一个工程核心问题:
如何在没有电的情况下,记住一根轴转了多少圈?
传统方案各有痛点:备用电池会耗尽,机械齿轮会磨损,而上电后的回零操作在很多场景下根本无法接受。但如果我们告诉你,一颗芯片就能解决上述所有难题呢?
这颗芯片就是ADI(Analog Devices)推出的ADMT4000——全球首颗单芯片“真上电”多圈位置传感器。它在2024年慕尼黑电子展(electronica)上斩获测试测量类产品大奖,评审评价其为“高度创新、独一无二、没有直接竞品”。
今天我们不深入探讨其物理原理(关于纳米线和磁畴壁的机制已有文章详述),而是换个更实用的视角:看看ADMT4000究竟能在哪些地方大显身手。
一、 芯片内部:三个传感器合一
如果你还不了解ADMT4000的工作原理,这里用30秒快速了解:
ADMT4000内部集成了一条铁磁纳米线螺旋。当外部磁铁旋转时,会驱动螺旋线中的磁畴壁移动——这个过程完全无需供电,是纯粹的物理现象。重新上电后,芯片通过测量螺旋线上不同电极的电阻值,就能判断磁畴壁的位置,从而精确推算出断电期间轴转了多少圈。
| 指标 |
数值 |
| 多圈范围 |
0~46圈(16,560°) |
| 角度精度 |
±0.25° |
| 测量更新率 |
100 kSPS |
| 断电保持 |
零功耗,不需要电池 |
| 温度范围 |
-40°C ~ +150°C |
| 通信接口 |
SPI |
一句话概括其核心价值:用物理状态而非电子信号记录旋转信息——断电了,信息还在。
想深入了解纳米线螺旋、GMR巨磁阻效应和AMR电桥的工作原理,可以查阅ADI官方的技术文档。
二、 六大应用场景实战解析
场景一:多圈密码转盘锁 —— 最直觉的应用 ⭐⭐
还记得电影里开保险箱的拨盘吗?左转右转再左转,按特定顺序转到特定位置才能开锁。

这其实是ADMT4000最直接的应用场景。
传统密码锁依赖一组带缺口的机械转盘,结构精密但昂贵,且密码组合数受物理限制。使用ADMT4000的方案则截然不同:
将磁铁固定在旋钮上,ADMT4000读取多圈绝对角度。MCU预设一组“密码角度序列”,例如:正转到第5圈的120°,反转到第12圈的45°,再正转到第20圈的270°。用户按顺序转到每个位置,全部匹配后输出“解锁成功”。
这个方案有两个关键优势:
- 密码空间巨大:46圈范围配合±0.25°精度,理论上可设置数万个离散密码节点,远超传统机械锁的3~5位组合。
- 断电状态保持:锁若在“已解锁”状态断电,重新上电后状态不变,不会因为意外停电而将用户锁在门外。
难度评估:⭐⭐ 仅需ADMT4000模块和一块MCU,无需电机,纯软件逻辑即可实现。非常适合新手入门。
场景二:车轮里程计 —— 圈数 × 周长 = 距离 ⭐⭐
自行车码表的原理众所周知:轮上装磁铁,车架装霍尔传感器,每经过一次计数+1,乘以轮周长即得距离。

但这种脉冲计数方式有个致命缺点:断电归零。除非额外增加存储芯片定期保存数据。
ADMT4000提供了一个更优雅的解决方案:
将磁铁固定在轮轴上,ADMT4000直接读取轮轴转动的绝对圈数。设定虚拟轮子周长(如自行车轮约2.1米),则:累计里程 = 圈数 × 周长。
46圈 × 2.1米 ≈ 96.6米,足以用于桌面演示。对于小轮子(如周长20cm的玩具车轮),46圈对应9.2米。
关键在于:断电后里程数据不丢失。 系统关闭再开机,里程继续累计。这在工业上称为非易失里程记录。传统方案需要依赖EEPROM或Flash定期写入,而ADMT4000让传感器本身就成了存储器。
难度评估:⭐⭐ 仅需ADMT4000模块+MCU,手动转动磁铁即可模拟车轮旋转进行验证。
场景三:电动升降桌 —— 角度→位移→高度的映射 ⭐⭐⭐
升降桌可能是最容易理解“为何需要断电位置记忆”的场景。想象一下:你把桌子调到适合站立的高度后关机,第二天上班开机,桌子如何知道当前高度?

传统方案通常是:
- 在丝杆中集成光电编码器,上电后先回降到最低点校准零位,再升到目标高度。
- 或使用霍尔传感器+备用电池来维持计数。
两种方案都不完美:回零耗时且增加机械磨损;电池方案则带来维护成本。
使用ADMT4000,上电瞬间即知当前高度,完全跳过回零过程。
其核心映射关系如下:
ADMT4000读取多圈角度 → 乘以丝杆导程得到直线位移 → 加上初始高度偏移 = 当前高度
举例:若使用导程为8mm的丝杆,ADMT4000的46圈就对应 46 × 8mm = 368mm的升降行程,对于桌面模型演示绰绰有余。
进阶玩法可以实现运动平滑控制——在接近目标高度时自动减速,避免冲击。这在工业电机控制中称为“梯形速度曲线”,是基础功之一。
难度评估:⭐⭐⭐ 需要ADMT4000模块、MCU、电机、驱动板以及丝杆机构。机械部分可用亚克力、3D打印件甚至乐高搭建。
场景四:智能升降吊灯 —— 卷线机构的角度恢复 ⭐⭐⭐
此场景与升降桌类似,但机械原理不同。升降桌用丝杆将旋转转为直线运动,而升降吊灯用卷线——电机轴上缠绕绳索,正转放线,反转收线。

卷线机构的挑战在于:若断电时电机正在放线,重新上电后系统必须知道“绳子已放出多长”,否则可能导致灯具坠落或反向收线撞上天花板。
ADMT4000的价值在于:断电后直接读取电机轴角度,并换算为已放出的绳长。
已放出长度 = 当前角度 ÷ 360° × 线轴周长
进阶要求还涉及工业控制中的经典问题——软限位:定义最大放出和最小收回长度,接近边界时减速,超出时锁死电机并报警。这在起重机、电梯等场景中是强制安全要求。
与升降桌的核心区别在于绳索是柔性的,可能存在打滑、卷绕不均等误差。如何在软件中补偿这些不确定性,是该场景的工程价值所在。
难度评估:⭐⭐⭐ 需要ADMT4000模块、MCU、电机、驱动板和绕线轴。机械结构可以很简单,例如用纸板木板做支架,电机缠细绳挂重物即可演示。
场景五:旋转炮塔/转台 —— 46圈“压缩”成360° ⭐⭐⭐⭐
想象一个激光炮塔:底座上的旋转平台需精确指向任意方位角。问题是,普通旋转编码器的分辨率受其位数限制。
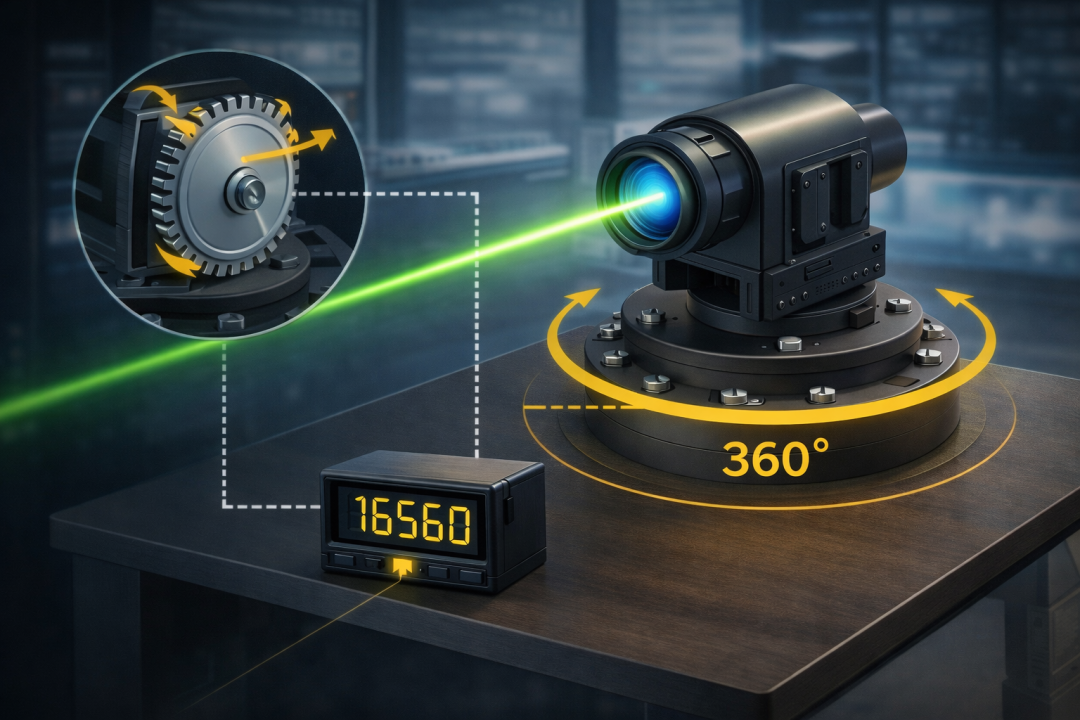
ADMT4000提供了一个巧妙的解决思路:
通过一组减速齿轮,让电机转46圈的同时,转台只转1圈(360°)。此时,ADMT4000测量电机轴的46圈,就等效于将360°的测量范围“拉伸”到了16,560°来测量。
最终分辨率大幅提升:ADMT4000的±0.25°精度,在映射到360°后,等效分辨率约为:
±0.25° ÷ 46 ≈ ±0.005°
这已接近高端工业伺服系统的水平,而你仅用了一颗芯片加一组齿轮。
这个概念在工业中称为电子齿轮比,广泛应用于数控机床、雷达定向等场景。根据ADI在行业展会上的演示,这种多圈-单圈映射能力正是ADMT4000在工业自动化领域备受看好的特性。
进阶玩法:为转台增加IMU(惯性测量单元),可实现移动基座上的目标锁定——即车体在移动,但炮管始终对准固定目标,这是经典的“惯性稳定平台”控制问题。
难度评估:⭐⭐⭐⭐ 需要3D打印转台、减速齿轮组和步进电机/舵机。机械结构是主要挑战。
场景六:机械臂关节 —— 安全优先于运动 ⭐⭐⭐⭐
机械臂是ADMT4000最“硬核”的应用方向之一。工业机器人每个关节都装有高精度编码器用于角度控制。

但传统编码器普遍有个问题:上电后不知关节当前位置。因此工业机械臂标准流程是上电后执行“回零”操作——各关节缓慢运动到机械零位。
回零过程存在两大问题:
- 耗时:多关节依次回零可能需要几十秒。
- 潜在危险:若机械臂在未知位置启动,可能发生碰撞。
ADMT4000的价值在于:上电瞬间即知关节绝对角度,完全跳过耗时而危险的回零过程。
更重要的是,它支持关键的安全特性——禁行角度区间。你可以在46圈范围内定义一个或多个“禁区”,当关节角度进入禁区边界时:
- 提前减速(预警缓冲区)。
- 到达边界时锁死电机。
- 输出报警信号。
这种“安全优先于运动”的策略,是工业机器人安全标准(如ISO 10218)的核心要求之一。理解这套设计思路,对深入掌握工业机器人控制大有裨益。
难度评估:⭐⭐⭐⭐ 无需整套机械臂,一个电机带一根杆件即可构成单关节演示系统。难点在于控制算法的完整性与安全性设计。
三、 新手入门:两个纯软件任务
如果你是第一次接触ADMT4000,觉得带机械结构的项目有难度,可以从这两个纯软件+模块就能完成的入门任务开始:
入门一:多圈角度读取与断电记忆验证
最简单的“Hello World”程序:用SPI读取ADMT4000寄存器,通过串口打印当前圈数和角度。然后手动转动磁铁到某个位置,断开USB供电再重新连接,验证数据是否一致。亲手验证“零功耗断电记忆”这一核心特性。
入门二:旋转方向与转速检测
连续读取角度数据,计算两次读数的差值(正数为正转,负数为反转),再除以时间间隔得到转速。这是一个经典的数字微分应用,涉及信号处理中的采样率、量化噪声等基础概念,动手实现一遍理解会更深刻。
这两个入门题的硬件需求完全相同:ADMT4000模块 + MCU,手动转动磁铁即可,无需电机。
四、 方案对比:传统痛点与ADMT4000优势
| 场景 |
传统方案 |
痛点 |
ADMT4000方案优势 |
| 密码锁 |
机械转轮+弹簧 |
密码组合少,易磨损 |
46圈,数万个离散位置 |
| 里程计 |
霍尔脉冲计数+EEPROM |
断电易丢失,需定期写Flash |
传感器自身即非易失存储 |
| 升降桌 |
光电编码器+回零校准 |
上电慢,机械磨损 |
上电即知高度,无需回零 |
| 吊灯升降 |
限位开关+电池计数 |
电池有寿命,限位不精确 |
零功耗角度保持 |
| 炮塔/转台 |
高精度编码器 |
昂贵,分辨率受限 |
通过齿轮比放大等效精度 |
| 机械臂关节 |
绝对值编码器+回零 |
回零耗时且存在风险 |
上电即知角度,跳过回零 |
你会发现,所有“传统痛点”归根结底都绕不开两个字:断电。而ADMT4000利用纳米线磁畴壁的物理机制,从根源上解决了断电数据丢失的难题。
五、 动手实践机会:相关设计竞赛
如果你已经跃跃欲试,这里有一个绝佳的动手机会。目前正有一场围绕ADMT4000展开的设计竞赛,其赛题几乎涵盖了本文提到的所有场景。
活动模式与奖项
活动采用 “完成即全额返还模块费用 + MCU补贴 + 优秀奖金” 的模式。这意味着,只要你完成基础任务,购买ADMT4000模块的费用全额退还,相当于免费体验。自行搭配的MCU主控还能获得额外补贴。
奖项设置丰厚,包括最高5000元的一等奖,以及众多优秀奖名额。
九大赛题速览
| 赛题 |
方向 |
难度 |
硬件需求(基础) |
| 题目一 |
旋转方向与转速检测 |
⭐ |
模块+MCU |
| 题目二 |
多圈角度读取与断电记忆验证 |
⭐ |
模块+MCU |
| 题目三 |
车轮里程计 |
⭐⭐ |
模块+MCU |
| 题目四 |
多圈密码转盘锁 |
⭐⭐ |
模块+MCU |
| 题目五 |
卷线机构断电角度恢复 |
⭐⭐⭐ |
+电机+绕线轴 |
| 题目六 |
升降控制(角度→高度映射) |
⭐⭐⭐ |
+电机+丝杆 |
| 题目七 |
机械臂关节安全限位控制 |
⭐⭐⭐⭐ |
+电机+杆件 |
| 题目八 |
多圈→单圈转台精确控制 |
⭐⭐⭐⭐ |
+步进电机+齿轮组 |
| 题目九 |
自由发挥 |
⭐⭐⭐ |
自定 |
特别注意:题目一、二等入门赛题只需模块和MCU,无需额外硬件,极大降低了参与门槛。
基础任务有多简单?
所有赛题共享统一的、宽松的基础任务标准:逻辑正确 + 断电后可恢复数据即可,不苛刻考察运动速度或精度。
以题目一为例,基础任务就三步:
- 用SPI读取ADMT4000寄存器。
- 串口打印圈数和角度值。
- 断电重启,验证数据一致性。
官方通常会提供基础驱动示例代码。完成基础任务即可获得模块费用返还和MCU补贴。
六、 技能价值:超越比赛的意义
抛开竞赛奖励,完成这些项目所能积累的技能栈非常硬核,极具市场价值:
- 入门级(题目1、2等):掌握SPI协议实战、传感器数据解析、数字信号处理基础(微分、滤波)。
- 进阶级(题目3、4等):涉及电机驱动(PWM、H桥)、运动学数学建模、系统状态机设计。
- 高级(题目5、6等):深入闭环控制(如PID)、安全系统设计、多传感器数据融合。
这些技能覆盖了嵌入式系统、工业自动化、机器人控制等领域的核心。在工业界,精通位置传感器应用与电机控制的工程师起薪颇具竞争力。对于在校学生而言,此类项目经历也是简历上极具分量的实践证明。
本文技术内容参考自Analog Devices官方文档及相关技术媒体报道。安全标准引用仅作概念说明,具体请查阅ISO原文。
 发表于 2026-3-18 05:13:42
|
查看: 149|
回复: 0
发表于 2026-3-18 05:13:42
|
查看: 149|
回复: 0
