理解电子系统中的数据传输机制,是深入硬件与嵌入式开发的关键。文字描述有时显得抽象,而直观的动态图示则能清晰展现信号的流动与交互过程。本文将通过一系列精心制作的动图,带你直观理解 SPI、I2C、UART 等常用通信协议,以及红外遥控、PWM 调制等基础概念的工作原理。
1. SPI 传输
SPI(Serial Peripheral Interface)是一种高速、全双工的同步串行通信总线。
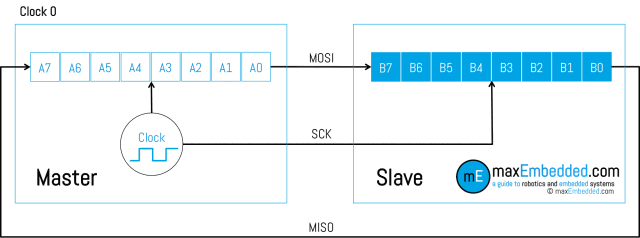
▲ 图1 SPI 数据传输时序
上图动态展示了 SPI 主设备(Master)与从设备(Slave)之间,数据位(A7-A0, B7-B0)在时钟信号(SCK)的同步下,通过 MOSI(主出从入)和 MISO(主入从出)线进行交换的过程。你可以清晰看到每个时钟周期数据位的移动与对齐。
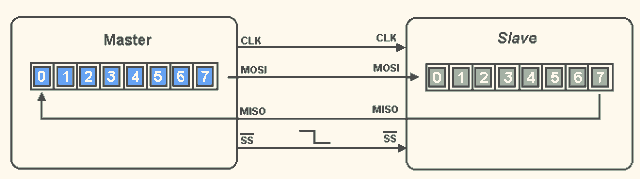
▲ 图1.2 SPI 数据传输(移位寄存器视角)
这张图从内部移位寄存器的角度揭示了 SPI 的工作本质。主从设备的 8 位移位寄存器在时钟驱动下同步循环移位。主设备寄存器移出的数据通过 MOSI 线进入从设备寄存器,同时从设备寄存器移出的数据通过 MISO 线进入主设备寄存器,从而实现数据的全双工交换。SS(Slave Select)信号线用于片选,低电平有效。
▲ 图1.3 SPI 标准时序信号
此图概括了 SPI 通信的完整时序。通信始于 SS(片选)信号的下降沿,之后 SCK(时钟)产生脉冲,数据在时钟边沿(上升沿或下降沿,取决于模式)进行采样和输出。通信结束时,SS 信号拉高。这张动图完美诠释了 SPI 四线制(SS, SCK, MOSI, MISO)的工作流程。
2. I²C 传输
I²C(Inter-Integrated Circuit)是一种多主从、半双工的同步串行总线,仅需两根线(SDA 数据线,SCL 时钟线)。
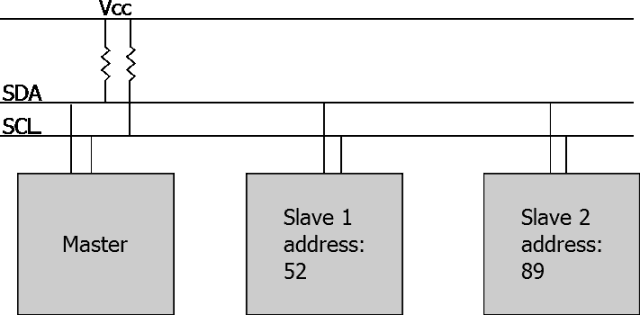
▲ 图1.2.1 I2C 总线寻址方式
这张动图生动演示了 I2C 总线的寻址与数据传输过程。总线上挂载了多个从设备(Slave 1 地址 52, Slave 2 地址 89)。主设备(Master)通过 SDA 线先发送目标从设备地址(例如 89)和读/写位(图中 “89R” 表示读操作),地址匹配的从设备(Slave 2)应答并被选中,随后进行数据(“Data”)传输。未被选中的从设备(Slave 1)则忽略后续通信。这直观展示了 I2C 基于地址的多设备管理机制。
3. UART 传输
UART(Universal Asynchronous Receiver/Transmitter)是一种异步串行通信协议,常见于调试接口和设备间通信。
▲ 图1.3.1 PC 通过 UART 调试 MCU 概念图
这张卡通图形象地表达了通过 UART 进行调试的场景:PC(软件端)通过串口向微控制器(MCU,硬件端)发送二进制数据(如 1010101)进行交互,MCU 则可能回应调试信息。这是嵌入式开发中最常见的调试通信方式之一。
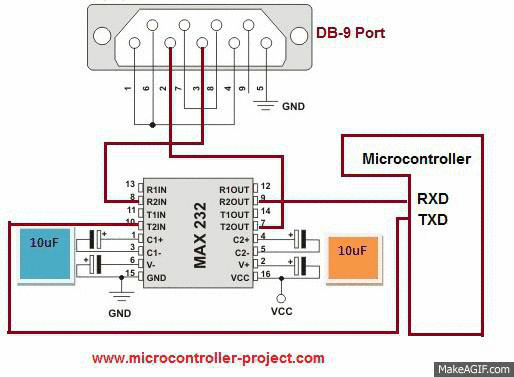
▲ 图1.3.2 RS-232 电平通过转换芯片与 MCU 通信
由于 PC 标准的 RS-232 接口使用 ±12V 电平,而 MCU 通常使用 0/3.3V 或 0/5V 的 TTL 电平,二者无法直接通信。这张动图详细展示了使用 MAX232 电平转换芯片的典型电路,动态演示了数据从 DB-9 串口(RS-232 电平)转换为 TTL 电平,以及反向转换的完整路径,是理解串口通信硬件连接的关键。
4. 红外控制
红外遥控本质上也是一种串行通信,使用红外光作为载体,调制在特定的载波频率(如 38kHz)上传输。
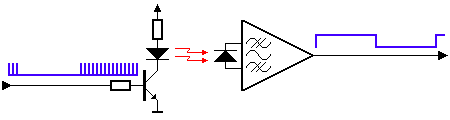
▲ 图1.4.1 红外信号的光耦隔离与整形
红外接收头收到的信号较弱且可能带有噪声。此动图展示了一个经典处理流程:信号先经过光电耦合器(光耦)进行电气隔离,防止干扰;再通过施密特触发器对波形进行整形,将不规则的输入脉冲转化为干净的数字方波输出。
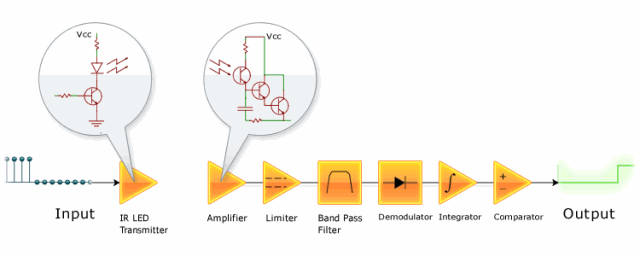
▲ 图1.4.2 红外信号接收与放大整形电路框图
这张图更系统地展示了红外接收电路的内部框图。接收到的红外信号经过放大、限幅、带通滤波(通常滤出 38kHz 载波)、解调、积分和比较等一系列处理,最终还原出原始的编码数字信号。
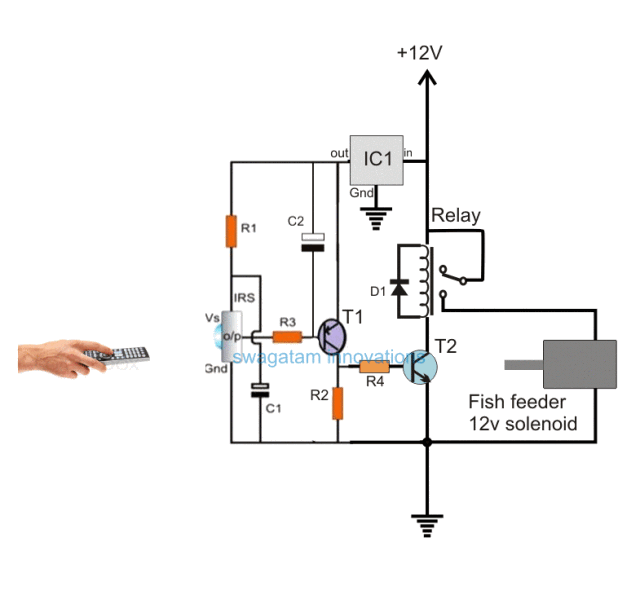
▲ 图1.4.3 红外接收控制继电器实例(鱼食投喂器)
这是一个将红外接收应用于实际控制的电路示例。红外接收管(IRS)收到信号后,驱动后续电路使继电器动作,从而控制 12V 电磁阀(如鱼食投喂器)。动图展示了从遥控发射到负载工作的完整信号链。
5. 串并转换电路
串行通信与并行数据格式的转换是数字系统中的常见操作,主要由移位寄存器实现。
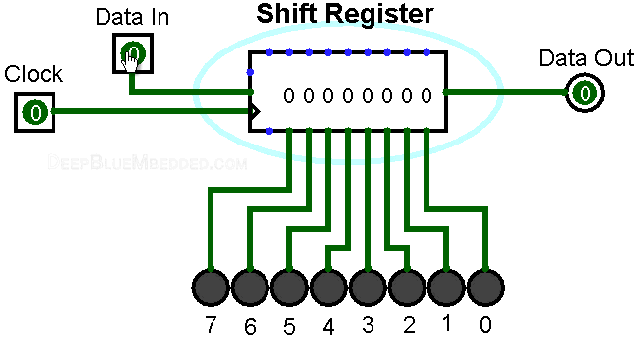
▲ 图1.5.1 串入、并出移位寄存器
这张图展示了一个 8 位串行输入、并行输出移位寄存器的工作过程。数据位(Data In)在时钟(Clock)驱动下,一位一位地移入寄存器。当 8 个时钟周期后,一个完整的字节数据就出现在 8 个并行输出端(Q0-Q7)。
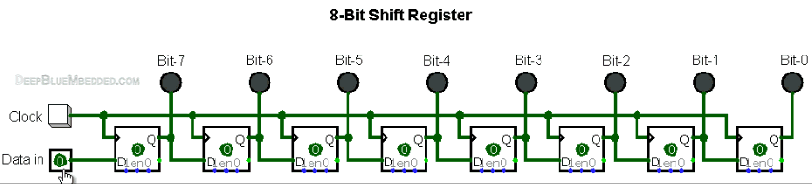
▲ 图1.5.2 由八个 D 触发器构成的移位寄存器
此图揭示了移位寄存器的内部结构——由一系列 D 触发器级联而成。前一级触发器的输出(Q)连接到后一级的输入(D),在公共时钟作用下,数据就像流水一样逐级传递,实现了移位功能。
▲ 图1.5.4 串行传输示意图
这张风格化的动图以视觉艺术的形式表现了二进制数据的串行流。它抽象地展示了数据(0 和 1 的序列)在一条信道中按时间顺序依次传输的概念。
6. 其他波形动画
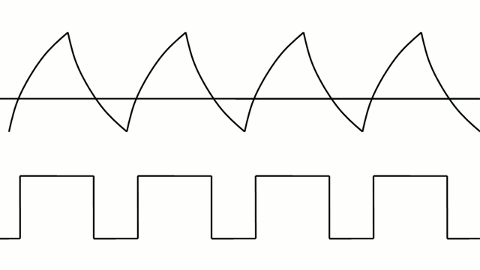
▲ 图1.6.1 PWM 波形与等效模拟电压
PWM(脉宽调制)通过调节方波信号的占空比来等效模拟电压值。上图(可能)展示了原始 PWM 波(下方)经过低通滤波后,得到平滑的模拟电压波形(上方)的过程。
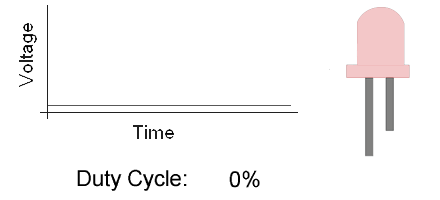
▲ 图1.6.2 PWM 控制 LED 亮度原理
这张图清晰揭示了 PWM 控制 LED 亮度的原理。左侧是不同占空比(0%, 60%, 80%, 10%)的 PWM 电压波形,右侧是对应的 LED 亮度。占空比越大(高电平时间比例越长),LED 平均功率越高,看起来就越亮。
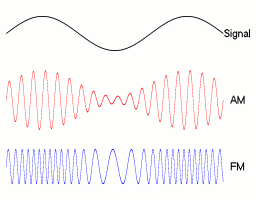
▲ 图1.6.3 调幅(AM)与调频(FM)信号
蓝色 AM 波形:其振幅随着黑色调制信号的变化而变化。红色 FM 波形:其频率随着调制信号的变化而变化(波形疏密变化),而振幅保持不变。这张对比图直观区分了两种基本调制方式。
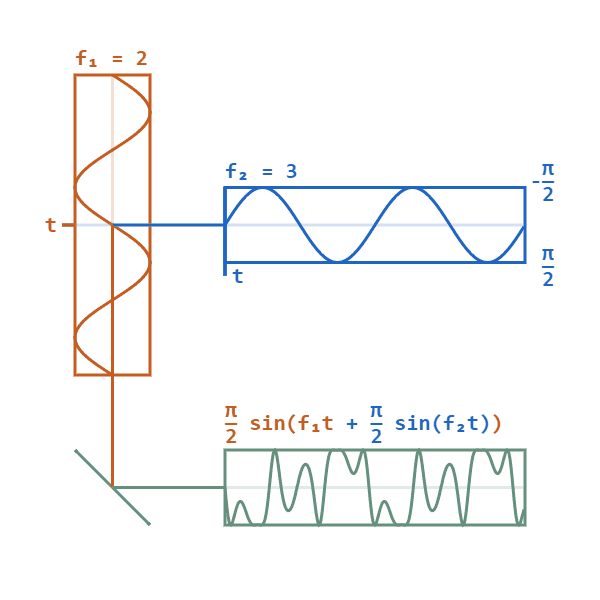
▲ 图1.6.4 信号叠加(或相位调制)示意图
此图展示了两个不同频率正弦波(f1=2, f2=3)进行线性叠加后,产生复杂波形的过程。这常用于解释信号合成、拍频或某些调制(如相位调制)的时域表现。
▲ 图1.6.5 方波边沿抖动(或畸变)波形
最后这张图展示了一个非理想的方波边沿,可能出现了抖动(Jitter)、振铃(Ringing)或畸变。在实际电路中,由于分布参数、反射等原因,理想的直角边沿往往难以保持,理解这些现象对高速电路设计至关重要。
以上动图从不同维度直观解释了嵌入式与电子工程中常见的通信与信号概念。希望这种可视化方式能帮助你建立更深刻的理解。如果你对这些技术的代码实现或更深入的原理讨论感兴趣,欢迎在云栈社区相关板块交流探讨。
 发表于 2026-4-20 12:19:10
|
查看: 197|
回复: 0
发表于 2026-4-20 12:19:10
|
查看: 197|
回复: 0
