旋转位置编码RoPE(Rotary Position Embedding)是Transformer模型中的一种创新位置编码策略,已广泛应用于LLaMA、ChatGLM等主流大模型。本文将从实现步骤、源码分析到数学原理进行全面解析,帮助读者深入理解这一关键技术。
位置编码基础概念
由于Transformer的Self Attention机制具有排列不变性,模型无法感知输入序列中单词的位置信息。为了解决这个问题,需要引入位置编码让模型理解词序关系。
位置编码主要分为两大类:
绝对位置编码:根据单个token的绝对位置定义编码,每个位置分配独立的位置向量。实现方式又分为:
- 固定式:如原生Transformer的sin-cos三角函数编码,通过固定公式计算
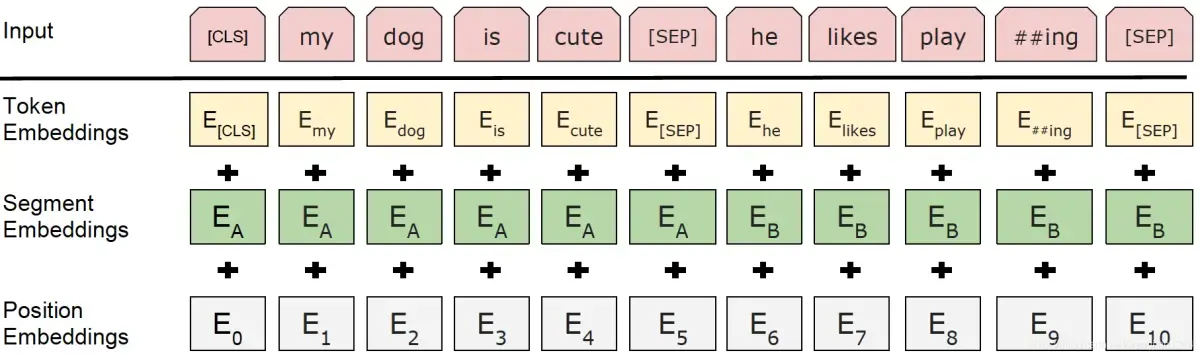
- 可学习式:如BERT和GPT,通过训练自适应学习位置向量
相对位置编码:对两个token之间的相对位置进行建模,将相对位置信息注入Self Attention结构中,代表模型包括Transformer-XL和DeBERTa。
RoPE的本质与计算流程
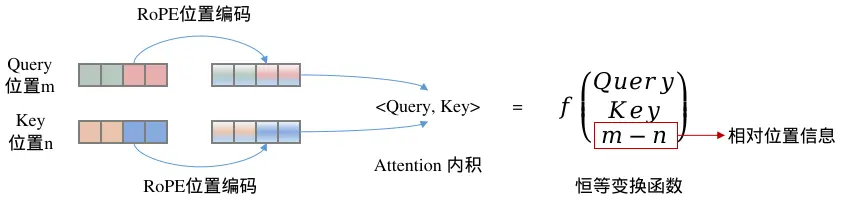
旋转位置编码RoPE是一种固定式的绝对位置编码策略,但其巧妙之处在于:通过绝对位置编码的实现方式,配合Attention内积机制,最终达到相对位置编码的效果。
RoPE的核心思想是对Query和Key向量进行变换,使变换后的向量自动携带位置信息,而无需修改Attention的内积结构。这种设计既保持了实现的简洁性,又兼具了相对位置编码的优势。
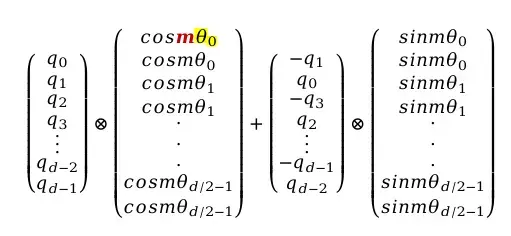
RoPE的计算公式如下:
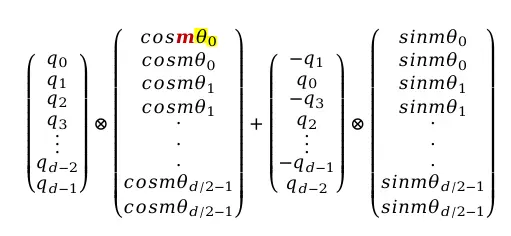
公式解读:
- 第一项:位置为m的token的原始Query向量
- 第二项:包含cos三角函数的向量,与Query逐位相乘
- 第三项:由原始Query变换而来
- 第四项:包含sin三角函数的向量
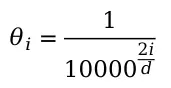
位置信息由参数m和θ共同表征,其中m为token在句子中的位置,θ与向量各元素位置相关:
计算示例
以"我爱你"中的第二个词"爱"为例,假设词向量维度d=4,向量表征为[0.2, 0.1, -0.3, 0.7],RoPE变换的计算过程如下:
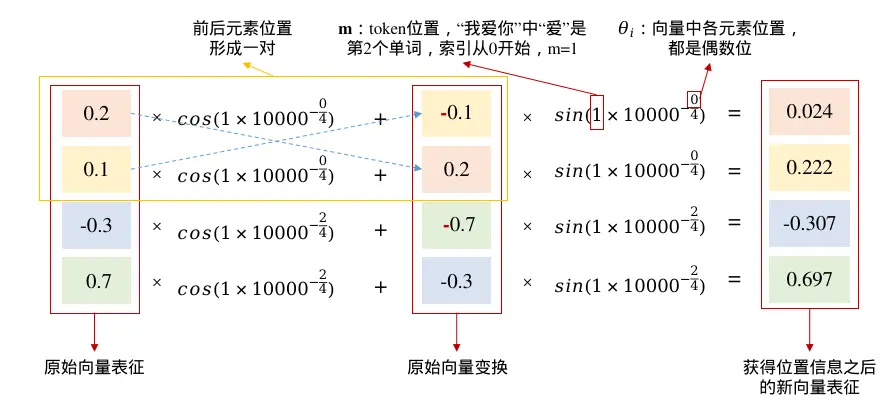
公式中的第三项由原始向量变换而来,将前后两个元素位置构成一对,交换位置并对偶数位取相反数。每个元素位的位置信息注入,可以看作该元素和其相邻元素分别经过sin、cos三角函数加权求和的结果。
RoPE如何表达相对位置信息
RoPE与传统sin-cos位置编码的对比:
实现途径不同:
- sin-cos编码:三角函数性质天然具备表达相对距离的能力
- RoPE编码:本身不能表达相对距离,需结合Attention内积激发相对位置表达能力
融合方式不同:
- sin-cos编码:直接与原始输入相加
- RoPE编码:采用类似哈达马积的相乘形式
RoPE的关键特性:带有RoPE位置编码的两个token,其Query向量和Key向量进入Self Attention后,内积结果可以恒等转化为一个函数,该函数仅与Query向量、Key向量以及两个token位置之差相关。这使得RoPE在不改变Attention结构的前提下,实现了相对位置信息的感知。
LLaMA源码实现解析
在HuggingFace的LLaMA大模型实现中,RoPE的计算分为三个步骤:
步骤一:初始化cos向量和sin向量
根据上下文窗口大小m和每个头的向量维度d,生成cos和sin向量。在LLaMA2中,上下文窗口m=4096,每个头的向量维度d=128。
class LlamaRotaryEmbedding(torch.nn.Module):
def __init__(self, dim, max_position_embeddings=2048, base=10000, device=None):
super().__init__()
# dim=128, max_position_embeddings=4096
inv_freq = 1.0 / (base ** (torch.arange(0, dim, 2).float().to(device) / dim))
self.register_buffer("inv_freq", inv_freq)
self.max_seq_len_cached = max_position_embeddings
# 生成位置索引 [0, 1, 2, ..., 4095]
t = torch.arange(self.max_seq_len_cached, device=self.inv_freq.device, dtype=self.inv_freq.dtype)
# 笛卡尔积生成mθ组合矩阵
freqs = torch.einsum("i,j->ij", t, self.inv_freq)
# [4096, 64] => [4096, 128]
emb = torch.cat((freqs, freqs), dim=-1)
# [1, 1, 4096, 128]
self.register_buffer("cos_cached", emb.cos()[None, None, :, :], persistent=False)
self.register_buffer("sin_cached", emb.sin()[None, None, :, :], persistent=False)
通过m向量和θ向量的笛卡尔积构造mθ组合矩阵,最终形成[4096, 128]的二维矩阵,再转换为四维以匹配多头注意力中Query和Key的形状[batch_size, num_heads, seq_len, head_dim]。
步骤二:截取对应长度的向量
根据输入Query的实际长度截取cos和sin向量。例如上下文窗口为4096,但实际输入句子长度仅为10,则截取前10个位置的向量。
def forward(self, x, seq_len=None):
return (
self.cos_cached[:, :, :seq_len, ...].to(dtype=x.dtype),
self.sin_cached[:, :, :seq_len, ...].to(dtype=x.dtype),
)
步骤三:改造Query和Key
使用cos和sin向量,根据RoPE公式对原始Query和Key进行变换:
def apply_rotary_pos_emb(q, k, cos, sin, position_ids):
q_embed = (q * cos) + (rotate_half(q) * sin)
k_embed = (k * cos) + (rotate_half(k) * sin)
return q_embed, k_embed
def rotate_half(x):
"""旋转向量的一半维度"""
# 前半部分
x1 = x[..., : x.shape[-1] // 2]
# 后半部分
x2 = x[..., x.shape[-1] // 2 :]
# 后半部分取负号,与前半部分拼接
return torch.cat((-x2, x1), dim=-1)
值得注意的是,HuggingFace的实现与论文公式在元素配对方式上有所不同:
- 论文公式:q0与q1配对
- 代码实现:q0与q64配对(前半部分与后半部分配对)
这两种方式在数学上是等价的,因为RoPE本质是以元素对为单位进行旋转变换,只要配对策略不重复且维度为偶数,Attention内积都能感知相对位置信息。
在完成Query和Key的改造后,直接输入标准的Attention结构:
attn_weights = torch.matmul(query_states, key_states.transpose(2, 3)) / math.sqrt(self.head_dim)
attn_weights = nn.functional.softmax(attn_weights, dim=-1, dtype=torch.float32).to(query_states.dtype)
attn_output = torch.matmul(attn_weights, value_states)
注意:Attention结构无需任何修改,且Value向量不参与RoPE变换。
数学原理推导
RoPE的数学推导涉及复数运算、欧拉公式和旋转矩阵等概念。
推导目标
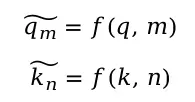
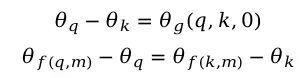
设位置m的token1的Query为q,位置n的token2的Key为k,改造函数为f,目标是找到一个改造函数,使得:
并且Attention内积能够恒等转化为:

二维情况推导
从最简单的二维向量入手,将q和k用复数表示(第一维为实部,第二维为虚部)。两者的内积等于q和k的共轭复数相乘的实部:

将三个复数用三角形式表示:
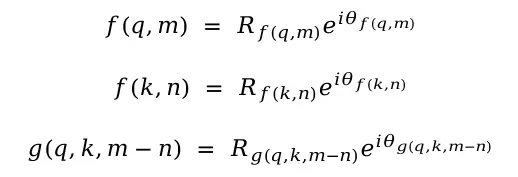
其中R代表向量模长,根据欧拉公式:

根据复数相乘的性质(模长相乘,幅角相加),可得:
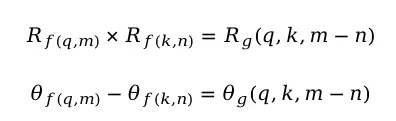
取特例m=n=0,得到:

可得θ是关于位置参数m的等差数列函数。将求解的R和θ代入,得到f的一般形式:

根据欧拉公式展开,该变换对应向量的旋转操作,改写成矩阵形式:

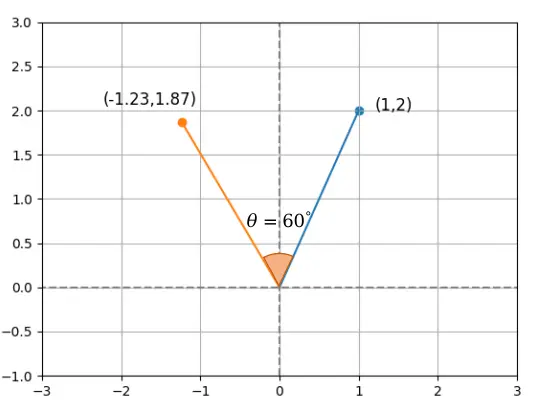
旋转矩阵验证
以二维向量[1, 2]旋转60度为例:
import numpy as np
def rotary_matrix(xita):
matrix = np.array([[np.cos(xita), -np.sin(xita)],
[np.sin(xita), np.cos(xita)]])
return matrix
m = rotary_matrix(np.pi / 3)
one = np.array([[1], [2]])
two = np.matmul(m, one)
print(two)
# array([[-1.23205081],
# [ 1.8660254 ]])
验证模长不变:
np.linalg.norm(one) # 2.236
np.linalg.norm(two) # 2.236
验证旋转角度为60度:
np.dot(one.T, two) / (np.linalg.norm(one) * np.linalg.norm(two))
# array([[0.5]]) # cos(60°) = 0.5
推广到任意偶数维
由于内积满足线性叠加性,任意偶数维向量都可以表示为多个二维情形的拼接,因此RoPE的最终公式为:
从旋转矩阵的角度理解:RoPE本质上是对各个位置的token向量根据自身位置m计算旋转角度,在Attention的内积操作中,内积能够感知旋转后两个向量之间的夹角,这个夹角就是相对位置信息。
总结
旋转位置编码RoPE通过巧妙的数学设计,实现了以下优势:
- 高效性:无需额外可学习参数,计算开销小
- 兼容性:无需修改Attention结构,易于集成
- 表达力:通过绝对位置编码实现相对位置感知
- 可扩展性:支持任意偶数维度的向量
这些特性使得RoPE成为当前大模型位置编码的主流选择,在LLaMA、ChatGLM等模型中得到广泛应用。理解RoPE的原理和实现,对于深入掌握Transformer架构和大模型技术具有重要意义。
转自 CSDN 作者 AI大模型datian
 发表于 2025-12-11 17:12:28
|
查看: 342|
回复: 0
发表于 2025-12-11 17:12:28
|
查看: 342|
回复: 0
