2026年4月,北京亦庄,荣耀“闪电”以50分26秒冲线,包揽人形机器人半程马拉松前六。观众的目光聚焦于它超过4米/秒的奔跑速度,以及赛后“摸电机甚至还是冷的”散热神话。但鲜有人注意到,在“闪电”的髋关节模组内部,驱动板上一块指甲盖大小的物理层芯片,正在以纳秒级的精度同步六台关节伺服电机——接口协议的选择,在无人问津的角落,直接决定了马拉松赛道上的胜负。
工程师在面对电机选型时,往往聚焦于扭矩、转速、功率密度,却常常将一个更深层、更致命的问题压到项目末期:“如何让控制器‘叫得动’这颗电机?”
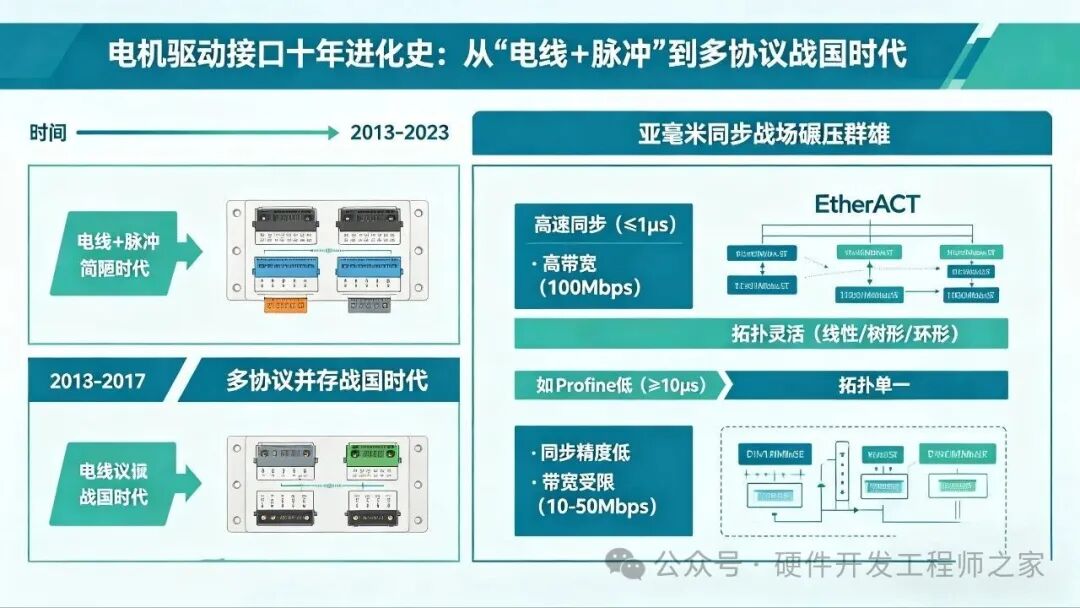
过去十年,电机驱动接口已经从“电线+脉冲”的简陋时代,进入了多协议并存的战国时代。RS-485如何凭借其坚固的物理层统治工控现场三十年?EtherCAT凭什么在亚毫米同步的战场上碾压群雄?人形机器人为何在高速奔跑时离不开EtherCAT,而一辆汽车的线控转向又为何可能让10BASE-T1S悄然上位?
本文将从硬件工程师的工程视角出发,横向对比主流电机驱动接口的核心技术参数,深度剖析其选型逻辑与优劣势,并为未来的接口演进方向提供专业预判。
01 接口的分类逻辑:物理层、协议层与应用层
在深入对比之前,有必要澄清一个工程上的基本概念:电机驱动接口是一个分层结构,而非单一的“选A或选B”。
电机驱动接口可解构为以下三个层次:
| 层次 |
核心问题 |
主流方案 |
技术特征 |
| 物理层 |
信号如何传输? |
RS-485、RS-232、以太网(100BASE-TX)、LVDS |
决定传输距离、抗干扰能力、线缆数量 |
| 数据链路层 |
数据如何成帧? |
Modbus RTU、CAN、EtherCAT、PROFINET |
决定通信效率、实时性、帧结构 |
| 应用层 |
数据含义是什么? |
CiA 602(伺服驱动行规)、PROFIdrive、脉冲 + 方向 |
决定控制语义的标准化程度 |
一个完整的电机驱动接口方案,是这三层的“叠罗汉”。例如,“RS-485物理层 + Modbus RTU协议 + 自定义寄存器映射”是一种经典组合;“以太网物理层 + EtherCAT协议 + CiA 402行规”则是高性能伺服的黄金搭档。
理解这一分层结构,是正确选型的基础。现代驱动器通常支持多种通信协议,如RS-232、RS-485、CAN总线、EtherCAT等,选择驱动器时需确保其通信接口与控制系统兼容。
02 主流接口全方位对比
2.1 RS-485:工控现场的“老兵”
RS-485采用差分平衡传输,可有效抑制共模噪声,在长达1200米的传输距离上保持信号完整性。当配合Modbus RTU协议使用时,这套组合能够为传感器、驱动器和控制器提供结构化的主从通信。
在实际应用中,RS-485通常支持几十个节点以内的网络规模。这种“节点数适中、抗干扰强、成本低廉”的特性,使其在PLC与变频器之间、在老旧设备的改造升级中,仍然占据着不可替代的地位。
工程判断:RS-485/Modbus的使命是解决“能不能通”的问题,而不是“通得多快、多准”。当系统对实时性和同步精度的要求不高时,它仍然是性价比最高的选择。
2.2 CAN/CANopen:汽车工业走出的“野战军”
CAN总线最早诞生于汽车内部复杂的电磁环境,具备极佳的抗干扰能力和错误处理机制。基于11位CAN ID,典型网络支持127个节点,适合中小规模分布式控制。
在电机驱动领域,CANopen的DS402运动控制行规是专门针对伺服电机的标准化协议,定义了位置、速度、转矩三种工作模式下PDO映射消息的设置方式。在机器人关节运动(如机械臂的旋转、移动机器人的轮系驱动)中,CANopen通过DS402实现控制器与伺服驱动器的精准实时数据交互。
一个典型的CANopen伺服执行器只需四根导线:CANH、CANL、+24VDC和0VDC。这种极简的线束设计,使其在医疗设备、机器人、自动化装配线等高要求场景中广泛应用。
工程判断:CAN/CANopen是“抗干扰、线束少、成本可控”的平衡之作,适合对实时性有一定要求但尚不需要纳秒级同步的中等规模分布式系统。
2.3 EtherCAT:运动控制赛道的“性能之王”
EtherCAT采用“飞读”机制——数据帧通过从站设备时,从站控制器(ESC)在硬件层面读取或插入数据,整个过程仅有几纳秒延迟。这种机制突破了传统以太网“收-解-封-发”的瓶颈,实现了工业以太网中最高效的数据传输。
关键性能参数如下:
| 性能维度 |
技术指标 |
工程意义 |
| I/O刷新速度 |
30微秒刷新1000个I/O点 |
快于绝大多数控制周期的物理极限 |
| 伺服轴控制 |
100微秒控制100个伺服轴 |
可同时驱动数十台机器人关节 |
| 单帧数据量 |
1486字节(≈12000个DI/DO) |
单帧即可传输海量过程数据 |
| 同步抖动 |
<20纳秒,同步误差<15纳秒 |
纳秒级同步,多轴运动如臂使指 |
在带宽利用率方面,EtherCAT可达90%以上,100Mbps网络下有效数据吞吐量超过80Mbps。
这些性能指标决定了EtherCAT的技术定位。据业内分析,EtherCAT凭借其卓越的性能,已成为工业机器人和人形机器人高性能关节控制的首选协议,在全球工业机器人通信协议市场中占据主导地位。从机器人运动学到同步印刷机,EtherCAT支持亚毫秒级多轴同步,这对于复杂机械臂的运动学至关重要。分布式驱动器的电流(转矩)控制也是其典型应用。
工程判断:如果你的系统需要“多轴、高速、纳秒级同步”,EtherCAT是绕不开的选择。代价是,它需要专用的从站控制器(ESC)芯片,且开发门槛显著高于RS-485和CAN。
2.4 PROFINET:西门子生态的“主场优势”
PROFINET基于标准以太网协议栈,分为三种模式:RT(实时)反应时间小于10ms,适用于常规自动化;IRT(等时实时)反应时间小于1ms,可满足伺服控制等驱动系统需求。
然而,PROFINET IRT的“等时实时”对网络拓扑有严格要求。有工程经验指出,使用PROFINET IRT连接反应釜控制系统时,必须使用西门子SCALANCE系列交换机才能保证时序确定性。这种对特定硬件生态的依赖,既是PROFINET的护城河,也是其开放性受限之处。
工程判断:如果你的控制系统已经是西门子全家桶(TIA Portal + SCALANCE + SINAMICS),PROFINET IRT是生态最优解。但在跨品牌、开放性要求高的系统中,其通用性不如EtherCAT。
2.5 脉冲方向/步进驱动接口:简单场景的“最低成本”
在最低的控制层级,脉冲方向(Pulse/Direction)接口仍是步进电机和部分低端伺服的标准配置。控制一对步进驱动器与步进电机只需要发送一路PWM脉冲和方向高低信号即可。
总线型步进电机驱动器相比脉冲型,不仅是体积上的优势,还能做到电机电流、电压、温度、堵转的实时反馈,以及电流、细分的实时更改,控制程序的编写也比梯形图简单许多。
工程判断:脉冲方向接口的价值在于“极致的简单和低成本”,是初学者和成本敏感型应用的入门选择。但一旦系统需要闭环反馈或动态参数调整,总线型接口的优势就会立刻显现。
03 对比表格:一张表看懂六大接口
| 接口类型 |
物理层 |
典型速率 |
实时性 |
同步精度 |
典型节点数 |
线束复杂度 |
成本 |
最佳应用场景 |
| RS-485/Modbus |
RS-485 差分 |
9.6–115.2kbps |
毫秒级 |
无硬同步 |
≤32(实际几十点) |
低(2 线 + 地) |
★★☆☆☆ |
变频器控制、传感器采集、老旧设备改造 |
| CAN/CANopen |
CAN 差分 |
125k–1Mbps |
亚毫秒级 |
位同步级 |
≤127 |
极低(2 线 + 电源) |
★★★☆☆ |
医疗设备、汽车电子、中小规模分布式控制 |
| EtherCAT |
以太网 |
100Mbps |
纳秒级 |
<15ns |
理论 65535 |
中(4/8 线) |
★★★★☆ |
人形机器人、多轴伺服、半导体设备 |
| PROFINET IRT |
以太网 |
100Mbps |
<1ms |
约 1μs |
几乎无限 |
中 |
★★★★☆ |
西门子生态下的运动控制、过程自动化 |
| 脉冲方向 |
单端 / 差分 TTL |
200k–500kHz |
实时(硬连线) |
无 |
1(点对点) |
低(3-6 线) |
★☆☆☆☆ |
步进电机控制、低端伺服、初学者项目 |
| 10BASE-T1S(未来) |
单对非屏蔽双绞线 |
10Mbps |
确定性 |
多点同步 |
≤50 |
极低(2 线) |
★★☆☆☆(预计) |
汽车区域架构、低成本传感器 / 执行器网络 |
注:成本星级从★到★★★★★,★越多成本越高。
04 选型决策树:从应用场景反推接口
面对复杂的接口矩阵,选型决策可以遵循以下工程逻辑:
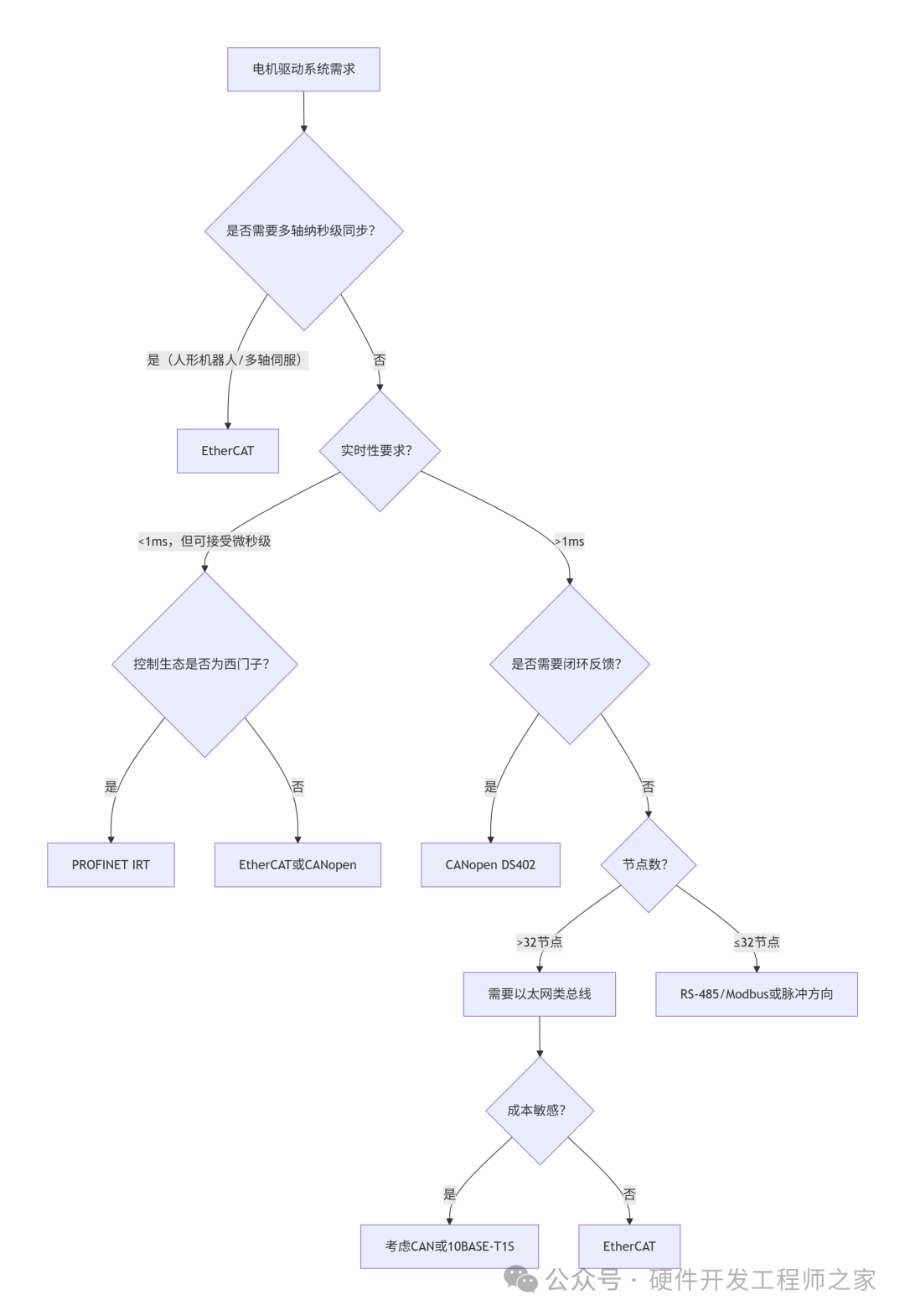
核心决策逻辑:
- 多轴纳秒级同步:EtherCAT是唯一选择
- 西门子生态锁定:PROFINET IRT是生态最优解
- 中等规模、闭环反馈、成本可控:CANopen DS402是平衡之选
- 简单、低成本、无闭环要求:RS-485/Modbus或脉冲方向
05 未来接口趋势:从EtherCAT到TSN与单对以太网
5.1 EtherCAT的市场地位与技术演进
从当前的市场格局来看,EtherCAT的地位在未来5-10年内难以被撼动。其在带宽利用率、同步精度和拓扑灵活性上的综合优势,目前尚无竞品能全面超越。
然而,EtherCAT的100Mbps带宽在面对超高分辨率视觉传感器与多轴伺服协同的极端场景时,已开始逼近物理极限。EtherCAT的继任者EtherCAT G将带宽提升至1Gbps,向下兼容100Mbps设备,为更高速的伺服控制和海量数据的实时传输打开了通道。与此同时,时间敏感网络正在成为工业通信的另一个重要演进方向,但它与EtherCAT更多是协同而非竞争关系——EtherCAT可用于设备级实时控制,TSN用于控制器间的同步网络。
5.2 10BASE-T1S:单对以太网的新战场
在EtherCAT统治的高性能领域之外,另一个值得关注的趋势是10BASE-T1S的崛起。10BASE-T1S由IEEE 802.3cg规范定义,是一种多点、无冲突的以太网标准,在非屏蔽双绞线单对以太网线缆上运行,数据传输速率为10Mb/s。
10BASE-T1S不仅具有确定性工作的特点,其基于非屏蔽单对以太网线缆的部署成本相对较低。在汽车领域,10BASE-T1S被用于将以太网连接扩展到车内的边缘设备,包括传感器和执行器。通过单对双绞线以多点总线形式实现共享通信,无需部署以太网交换机,也可省去大体积的以太网/CAN网关。恩智浦也已推出符合IEEE 802.3cg标准的10BASE-T1S PMD收发器,支持多点拓扑。
10BASE-T1S是否会替代EtherCAT? 答案是否定的。10BASE-T1S的10Mbps速率远低于EtherCAT,其定位是“低成本、低复杂度”的边缘连接,而非“高性能、高同步”的运动控制主战场。但在汽车区域架构、低成本工业传感器网络、以及那些此前因预算或封装限制而无法使用以太网的应用中,10BASE-T1S正在打开新的可能性。
10BASE-T1S是否会冲击CAN? 这是更值得关注的命题。10BASE-T1S与CAN在定位上高度重叠——都是低成本、低线束、多点总线的网络解决方案。但10BASE-T1S拥有以太网的“基因优势”:它天然兼容IP协议栈,与上层IT系统无缝对接。在汽车软件定义架构的大趋势下,10BASE-T1S对传统CAN的替代将是渐进而深远的。
06 对工程师的选型建议
6.1 如果你在做机器人关节控制
请直接上EtherCAT。 人形机器人的多轴协同、纳秒级同步、高带宽反馈,都是EtherCAT的统治区。选择任何其他接口,都意味着在性能上做出不可逆的妥协。
6.2 如果你在做工业设备改造
RS-485/Modbus仍然够用。 不要为了“技术潮流”而推翻已验证数十年的成熟方案。只有当现有方案的带宽或实时性成为明确瓶颈时,才应考虑向EtherCAT或CANopen迁移。
6.3 如果你在做汽车或低成本分布式控制
密切关注10BASE-T1S的生态成熟度。 它可能是未来五年内汽车区域架构和低成本工业网络的标准答案,值得在下一代产品规划中预留接口。
6.4 硬件设计的关键参数速查
| 关键考量 |
RS-485 |
CAN |
EtherCAT |
10BASE-T1S |
| 终端电阻 |
120Ω 两端匹配 |
120Ω 两端匹配 |
100Ω(需考虑物理层) |
100Ω(多点拓扑) |
| 隔离要求 |
推荐隔离 |
推荐隔离 |
推荐隔离 |
推荐隔离 |
| 最大传输距离 |
1200m @ 低速率 |
1000m @ 低速率 |
100m |
25m(多点) |
| 连接器建议 |
DB9 / 凤凰端子 |
DB9/M12 |
RJ45/M12 |
单对连接器 |
结语:接口的选择,决定系统的上限
2026年,电机驱动接口的赛道从未如此拥挤。RS-485统治着“够用就好”的广袤工控平原,EtherCAT在高性能运动控制的高地上插旗立碑,CANopen在分布式控制的丘陵地带稳步行军,而10BASE-T1S正在汽车和低成本以太网的荒野中开辟新的路径。
工程师在选择电机驱动接口时,本质上是在做一道系统级的设计题——不只是“要选哪个协议”,而是“整个系统的实时性、同步性、可靠性、成本、可维护性的天花板在哪里”。
当你的六轴机器人以纳秒级同步完成精密装配,当你的AGV车队在CAN总线上下发毫秒级的制动指令,当你的下一代汽车传感器通过10BASE-T1S以10Mbps接入区域网关——这些接口背后的物理层芯片、协议栈软件和工程判断,共同决定了一台机器能跑多快、能控多准、能活多久。
 发表于 2026-4-24 16:55:30
|
查看: 148|
回复: 0
发表于 2026-4-24 16:55:30
|
查看: 148|
回复: 0
