这张由 Brian Douglas 在 2020 年创作的手绘地图,是控制理论领域的一份经典「知识全景图」——它以中心辐射 + 分区分类的方式,将控制理论的核心分支、方法、工具和分析维度完整串联在一起,非常适合用来搭建系统的知识框架。如果你想找一份高质量的技术文档来辅助理解整个体系,这张图算得上是一份生动的知识图谱。
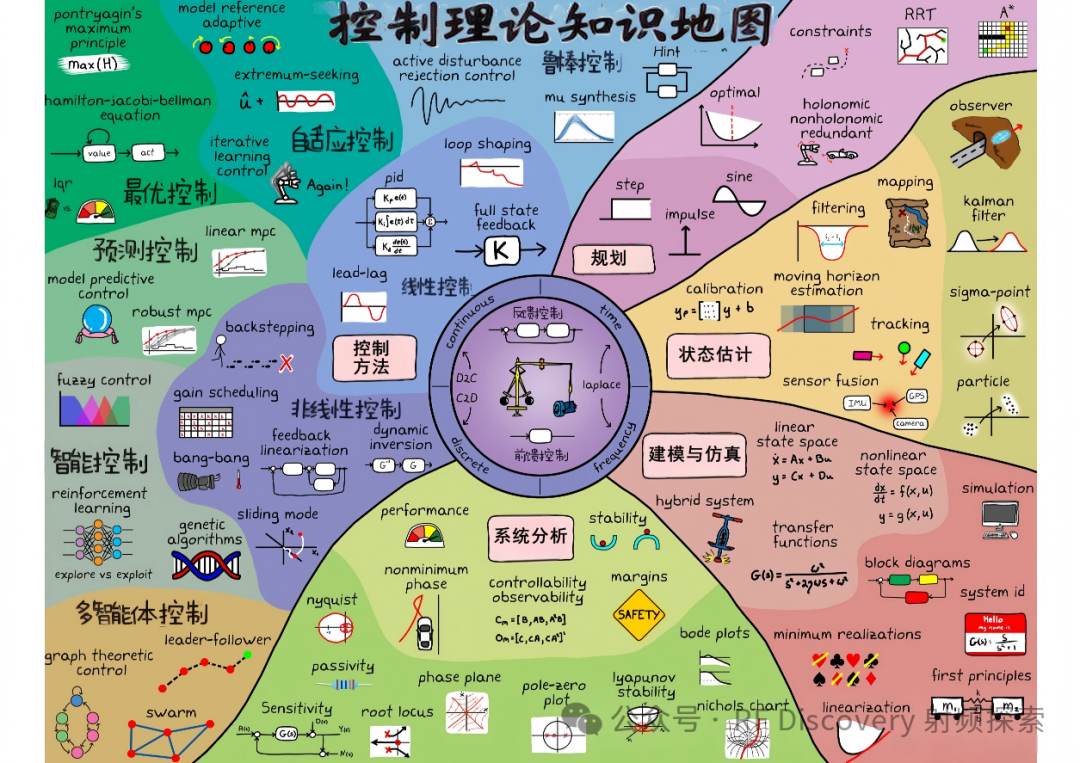
中心核心:控制理论的基础维度
地图最中心的紫色圆圈,是所有控制方法赖以建立的底层基座,它定义了控制理论最核心的几个要素:
八大核心分支详解
1. 线性控制 (Linear Control) —— 控制理论的基石
位于中心上方的蓝色区域,是所有控制方法的根基,核心是线性时不变(LTI)系统:
- 经典方法:
PID 控制(比例-积分-微分,工业界应用最广)、lead-lag (超前-滞后校正)、loop shaping (回路整形)。
- 高级方法:
full state feedback (全状态反馈),通过状态矩阵 $K$ 来设计控制器。
- 特点:数学模型相对简单、理论成熟、易于实现。从这儿入门,算是给整个控制理论的学习打基础。
2. 规划 (Planning) —— 轨迹与路径控制
位于右上方紫色区域,核心任务是为系统设计出可行的目标轨迹:
- 输入信号:
step (阶跃)、impulse (脉冲)、sine (正弦),这些是用于系统测试的标准输入。
- 优化方法:
optimal (最优控制)、constraints (约束控制)。
- 路径规划算法:
RRT (快速扩展随机树)、A*算法,在机器人、自动驾驶等领域很常见。
- 系统特性:涉及
holonomic/nonholonomic (完整/非完整约束系统),例如轮式机器人就属于典型的非完整约束系统。
3. 状态估计 (State Estimation) —— 从测量中还原系统状态
位于右侧的黄色区域,专门解决系统内部状态无法直接测量的难题:
- 经典算法:
kalman filter (卡尔曼滤波)、sigma-point (西格玛点滤波)、particle filter (粒子滤波)。
- 进阶方法:
observer (观测器)、moving horizon estimation (滚动时域估计),以及 sensor fusion (传感器融合)(融合 IMU、GPS、相机等多源数据)。
- 核心应用:滤波、目标跟踪、标定(
calibration)和映射(mapping)。
4. 建模与仿真 (Modeling & Simulation) —— 控制的前提
位于右下方的粉色区域。道理很简单:没有精准的模型,就很难有好的控制效果:
- 系统描述:
linear state space (线性状态空间)、nonlinear state space (非线性状态空间)、transfer functions (传递函数)。
- 工具与方法:
block diagrams (框图)、system id (系统辨识)、first principles (第一性原理建模)、linearization (线性化)。
- 核心:用数学模型精确描述被控对象,为后续的控制器设计铺路。
5. 系统分析 (System Analysis) —— 评估控制性能的标尺
位于下方的绿色区域。所有控制器设计出来后,都需要通过分析来验证其有效性:
- 核心特性:
stability (稳定性)、controllability (可控性)、observability (可观测性)、performance (性能)、margins (稳定裕度)。
- 经典分析工具:
nyquist (奈奎斯特图)、bode plots (伯德图)、nichols chart (尼科尔斯图)、root locus (根轨迹)、lyapunov stability (李雅普诺夫稳定性)、pole-zero plot (零极点图)、phase plane (相平面)。
- 关键指标:
nonminimum phase (非最小相位)、passivity (无源性)、sensitivity (灵敏度)。
- 安全标识:
SAFETY,这一点再强调都不为过——稳定性是整个控制系统的生命线。
6. 非线性控制 (Nonlinear Control) —— 处理真实世界的非线性
位于左下方的紫色区域,主要应对线性控制难以处理的非线性系统:
- 核心方法:
feedback linearization (反馈线性化)、backstepping (反步控制)、sliding mode (滑模控制)、gain scheduling (增益调度)、dynamic inversion (动态逆)、bang-bang (开关控制)。
- 特点:适用于强非线性、高不确定性的系统,理论复杂度更高,但鲁棒性通常也更强。
7. 智能/多智能体控制 (Intelligent & Multi-Agent Control) —— 数据驱动与群体协作
位于左侧的绿色与棕色区域,代表了现代控制理论的前沿方向:
- 智能控制:
fuzzy control (模糊控制)、reinforcement learning (强化学习)、genetic algorithms (遗传算法)。这些方法的优势在于依赖数据驱动,不要求拥有精确的系统模型。目前人工智能领域的进步,正给这类控制方法注入新的活力。
- 多智能体控制:
multi-agent (多智能体)、swarm (群体控制)、leader-follower (领导者-跟随者)、graph theoretic control (图论控制)。
- 核心:利用智能算法或群体协作机制,解决那些复杂、不确定、大规模系统的控制难题。
8. 最优/预测/自适应/鲁棒控制 (Optimal/Predictive/Adaptive/Robust) —— 高性能控制方法
位于左上方的绿色、青色和紫色区域。这些都是针对特定性能需求而生的高级控制策略:
optimal (最优控制):旨在最小化某项性能指标。比如 LQR (线性二次调节器)、pontryagin's maximum principle (庞特里亚金极大值原理) 和 hamilton-jacobi-bellman equation (HJB 方程)。predictive (预测控制):核心代表是 model predictive control (MPC,模型预测控制) 以及 linear/robust MPC。它通过滚动优化的方式,能显式处理系统约束。adaptive (自适应控制):包括 model reference adaptive (模型参考自适应)、iterative learning control (迭代学习控制) 和 extremum-seeking (极值寻优)。其特点是能在线调整参数,从而适应系统特性或环境的变化。robust (鲁棒控制):例如 H∞ 控制、mu synthesis (μ 综合) 和 active disturbance rejection control (ADRC,自抗扰控制)。这类方法的强项在于能有效抑制外部干扰和模型自身的不确定性。
这张图的核心价值
- 知识框架搭建:它能帮你把零散的知识点串联成一个系统性的全局视图,让你清楚每个控制方法的定位及它们之间的关联。
- 学习路径指引:遵循这幅图的结构,你可以从中心的线性控制入门,再逐步扩展到非线性、智能、鲁棒等更高级的分支。
- 工程实践参考:它几乎覆盖了从建模、分析,到控制器设计、状态估计与仿真的完整流程,可以作为相关领域工程师随手翻阅的「速查手册」。
|  发表于 2026-4-28 00:04:50
|
查看: 201|
回复: 0
发表于 2026-4-28 00:04:50
|
查看: 201|
回复: 0
