2026年的北京车展上,“舱驾一体”和区域控制架构已成为主流。随着大六座、大五座新车价格持续下探,整车对智能化硬件成本的敏感度正快速攀升。汽车实质上已演变为一个集中加分布的计算系统,而区域控制器(ZCU)作为系统中的“边缘节点”,自然也在成本与功能层面被反复校核。它推动着计算集中、控制下沉、执行分布的核心理念,构建起一个由计算节点、通信网络和电源系统交融而成的有机整体。
告别传统体系:从分散的ECU到集中的“云-边-端”
传统分布式ECU体系在过去几十年里运行良好,但在软件定义汽车(SDV)时代,其结构性缺陷被迅速放大。一方面,ECU数量的线性增加带来了点对点连接的爆炸式增长,导致整车线束长度和重量失控,成本与复杂度双双攀升。另一方面,软件体系极度割裂——每个ECU独立开发,OTA升级难度极大,功能演进举步维艰。与此同时,以CAN/LIN为主的通信体系在带宽和时延上已无法支撑中央计算的需求。
因此,进入2026年,中国车企正快速抛弃传统的分布式控制单元体系。通过中央计算平台统一处理算法与决策(舱驾融合后这一目标已基本实现),由区域控制器接管局部控制与供电,而边缘节点则负责执行具体动作。这种“云-边-端”式结构不仅大幅降低了线束复杂度,还让软件架构趋于统一,将复杂性从“功能分布”转移到了“系统耦合”——即通信、电源和控制三者开始高度交织。

边缘节点的深层博弈:当连接、能量与控制相互交织
然而,工程实现的瓶颈恰恰出现在边缘。节点数量呈指数级增长,一个车门、车灯或座椅内部都可能包含多个执行器与传感器,这让区域控制器不得不管理大量低速但实时性要求极高的通信。更棘手的是通信的不确定性:传统以太网的冲突机制不适合车载实时系统,而CAN/LIN又无法提供足够带宽,这种“既求实时,又要扩展”的矛盾在边缘被急剧放大。
区域控制器还承担着沉重的供电与保护职责。它既要驱动电机、灯具等感性负载,又要在复杂的电磁环境中保证系统稳定,这带来了效率、热管理与电磁干扰(EMI)之间的多重权衡。一旦设计不当,不仅功能受限,还会反过来干扰通信系统。因此,边缘节点的问题本质上已演变为一个“连接+能量+控制”的系统级难题。
针对上述挑战,底层技术路径正逐渐清晰:
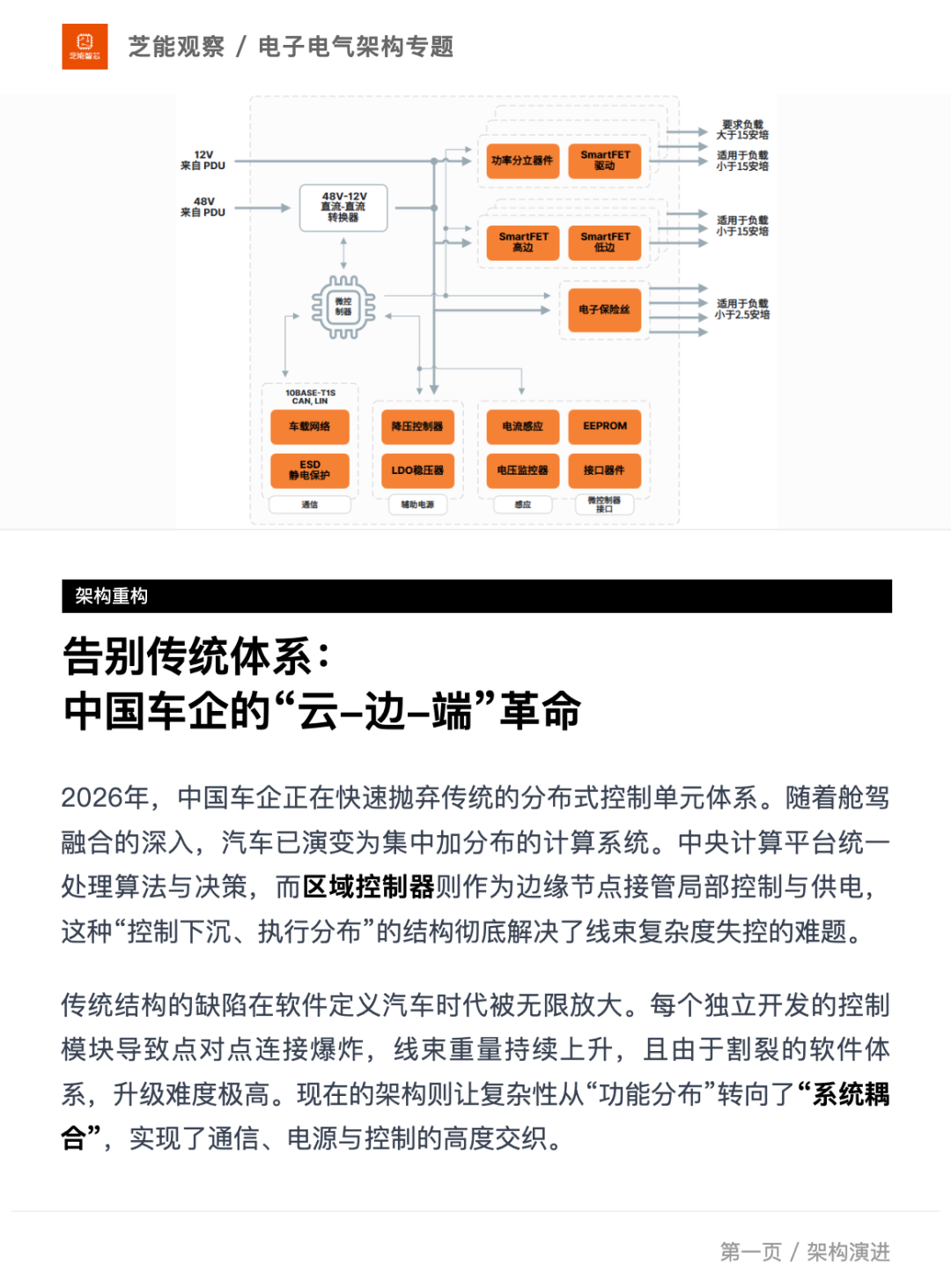
- 通信体系重构:通过将以太网能力下沉到边缘,利用10BASE-T1S实现多节点共享单条双绞线,并引入PLCA机制在物理层避免冲突,从而实现确定性通信。这让系统既具备以太网的带宽优势,又保留了类似CAN的实时特性,从根本上解决了“连接可扩展且可控”的问题。
- 能量与保护升级:
- 在功率侧,新一代MOSFET通过降低导通电阻和开关损耗,并优化二极管恢复特性,缓解了效率、热与EMI之间的矛盾,使高密度功率集成成为现实。
- 在配电侧,eFuse和智能高/低边开关(SmartFET)将传统被动式保险丝升级为可编程电源节点,实现了微秒级保护、可复位操作及状态上报,使电源系统具备了“感知与控制能力”。
这三条路径协同作用,使区域控制器从简单的连接枢纽,演变为集通信、供电与控制于一体的综合单元。这些技术已无法独立优化——功率器件的开关特性直接影响电磁噪声,干扰通信稳定性;通信的延迟与确定性又决定了控制策略的有效执行;而供电系统的稳定性,则是一切功能运行的前提。这种深度的耦合关系,让传统的“分模块设计、分别验证”方法逐渐失效,系统级协同设计取而代之。半导体厂商的角色也随之转变,从供应单一器件转向提供涵盖通信、驱动与配电的完整系统解决方案,通过协同优化来降低整车厂在集成与验证阶段的复杂度。
一盏车灯的架构革命:软件定义硬件的物理实现
车灯是区域控制最典型的应用之一。
传统方案中,灯具内部需要独立的微控制器(MCU)来解析通信协议和控制驱动,通过CAN总线接收指令。这种方式虽然成熟,但造成了严重的硬件冗余和软件复杂性问题,在矩阵大灯、动态投影等新功能出现后,其局限性愈发凸显。在新架构下,中央计算单元可直接通过10BASE-T1S与车灯通信,由远程通信协议芯片完成协议解析,从而取消了本地MCU。同时,高效MOSFET负责LED驱动,eFuse提供快速保护与状态反馈。
这种“去本地控制、强化中央调度”的方式,让系统结构更加扁平、成本更可控,并且使功能升级完全依赖软件实现。车灯由此从一个独立的硬件子系统,演变为整车计算网络中的一个“可编程、可调度节点”。
小结
软件定义汽车时代的到来,真正变革的并非应用层功能本身,而是底层架构的统一。区域控制器只是这场演进的阶段性产物。更深层的趋势是:汽车正逐渐具备计算系统的全部特征——统一网络、集中算力、分布执行与可编程电源。在这一进程中,打通“连接、能量与控制”的能力,将成为衡量车企未来竞争力的核心标尺。 |  发表于 2026-5-3 20:50:39
|
查看: 90|
回复: 0
发表于 2026-5-3 20:50:39
|
查看: 90|
回复: 0
