在工业自动化应用中,实现精确的位置控制是保障设备稳定高效运行的核心。西门子S7-200 SMART PLC为此提供了多样的解决方案,其中运动控制向导以其图形化的配置流程,成为工程师实现高速脉冲开环定位的首选工具。本文将深入探讨如何使用运动控制向导,并重点解析其中用于定位控制的AXISx_GOTO指令。
一、S7-200 SMART运动控制方案一览
S7-200 SMART主要支持三种位置控制方式:
- 运动控制向导:基于高速脉冲输出的开环控制,配置直观。
- PLS指令:通过编写脉冲输出指令实现开环控制,灵活性高。
- EPOS指令库:通过PROFINET通信控制支持闭环功能的驱动器。
本文将聚焦于最常用的运动控制向导方法,详解其配置与核心指令应用。
二、环境准备
硬件要求:
- SIMATIC S7-200 SMART CPU(固件版本 V2.7 及以上)。
软件要求:
- STEP 7-Micro/WIN SMART 编程软件(版本 V2.7 及以上)。该版本新增了轴组功能,支持多轴直线插补,为复杂运动轨迹控制提供了便利。
三、运动控制向导配置详解
1. 启动配置向导
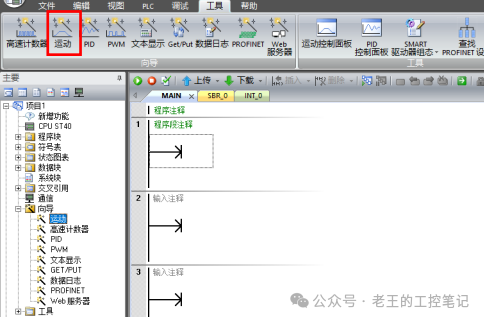
在STEP 7-Micro/WIN SMART软件中,依次点击“工具” → “向导” → “运动”,即可打开运动控制配置界面。
2. 选择配置类型
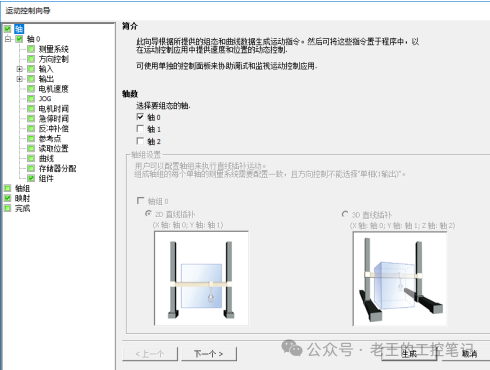
根据实际控制需求,选择配置单个运动轴或进行多轴协同的轴组配置。
3. 关键参数设置
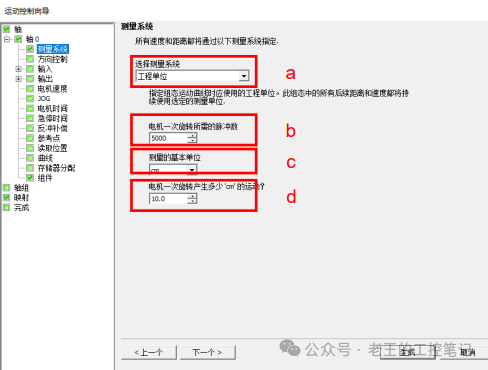
此步骤是配置的核心,需要根据实际机械系统设置以下参数:
- 测量系统:选择使用工程单位(如毫米)或脉冲数。
- 电机每转脉冲数:伺服或步进电机编码器反馈的每转脉冲数。
- 电机每转运行距离:电机旋转一周,机械负载移动的实际距离。
四、生成的指令集概览
向导配置完成后,软件会自动在项目树中生成一个专用的指令子程序库,其中包含一系列控制指令,例如:
| 指令名称 |
功能说明 |
AXISx_CTRL |
启用与初始化运动轴 |
AXISx_MAN |
手动模式(点动)控制 |
AXISx_GOTO |
运动到指定位置(核心定位指令) |
AXISx_RUN |
运行预定义的包络(多段路径) |
AXISx_RSEEK |
搜索参考点(建立零点) |
五、核心指令:AXISx_GOTO深度解析
基本使用原则
- 单指令激活:同一时间只能有一条运动控制指令(如GOTO、RUN)对同一个轴生效。
- 持续使能:
AXISx_CTRL指令需在每次扫描周期执行,通常使用常开触点SM0.0调用。
- 建立参考点:执行绝对位置定位前,必须通过
AXISx_RSEEK或AXISx_LDPOS指令建立零点坐标系。
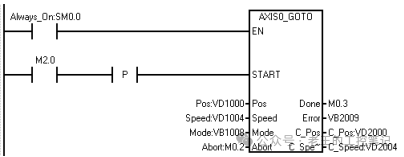
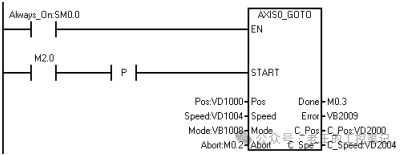
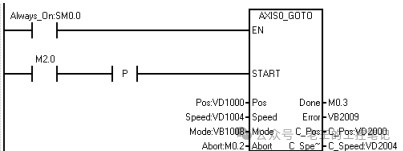
指令参数说明
EN: 使能调用
START: 触发定位命令(上升沿有效)
Pos: 目标位置值(绝对模式)或移动距离(相对模式)
Speed: 运行的最高速度
Mode: 运动模式选择
0 - 绝对位置
1 - 相对位移
2 - 连续正转
3 - 连续反转
六、相对运动与绝对运动的区别
相对运动 (Relative Move)
- 概念:以当前位置为起点,移动指定的距离。
- 特点:无需建立机械参考点即可使用。
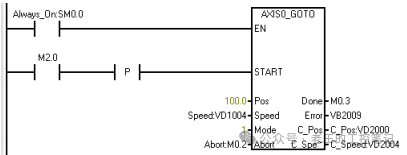
- 示例:指令
Pos=100.0, Mode=1,表示从当前位置正向移动100个用户单位。
绝对运动 (Absolute Move)
- 概念:运动到以参考点为原点的坐标系中的某个特定坐标位置。
- 特点:必须事先建立稳定的参考点。
- 示例:指令
Pos=200.0, Mode=0,表示运动到距离参考点200个用户单位的绝对坐标位置。
七、V2.7重要特性:超驰控制
功能定义
超驰 是指当轴正在执行一个AXISx_GOTO指令时,允许通过触发一个新的AXISx_GOTO指令来实时修改当前运动的目标位置、速度或模式,而无需先停止当前运动。
超驰行为特点
- 动态修改:可更改目标位置(Pos)、运行速度(Speed)和运动模式(Mode)。
- 平滑过渡:速度变化时,轴会平滑加速或减速至新设定值。
- 方向处理:若要求运动方向反转,轴会先减速停止,再向反方向启动。
- 应用场景:适用于运动过程不允许中断,但需要根据系统反馈实时调整参数的场合。
实现方法
- 在轴运动过程中,修改原
AXISx_GOTO指令的Pos、Speed等参数,并重新产生一个START上升沿信号。
- 直接调用另一个
AXISx_GOTO指令(针对同一轴)。
八、应用注意事项
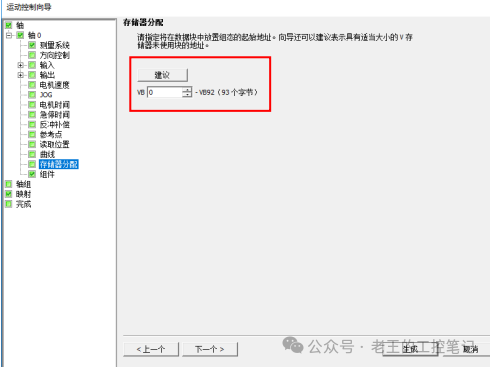
- 存储区占用:运动控制向导会占用固定的V存储区,在编程时应避免使用这些地址,防止数据冲突。
- 数据类型:若配置中使用工程单位,位置、速度参数应使用REAL(实数)类型;若使用脉冲数,则应使用DINT(双整数)类型。
- 中止功能:
Abort输入管脚对所有运动指令均有效,触发后会立即中止运动,使用时需注意逻辑安全。
- 版本依赖:超驰控制功能仅在STEP 7-Micro/WIN SMART V2.7及更高版本中支持。
通过运动控制向导,S7-200 SMART为工程师提供了一套从简单单轴定位到复杂多轴插补的完整解决方案。熟练掌握AXISx_GOTO指令的相对/绝对定位模式及超驰控制功能,能够显著提升设备运动控制的精度、灵活性和响应能力。 |  发表于 2025-12-15 18:03:44
|
查看: 450|
回复: 0
发表于 2025-12-15 18:03:44
|
查看: 450|
回复: 0
