在工控行业深耕的工程师们,是否已经察觉到,PLC编程早已超越了简单的逻辑运算范畴?
许多工程师朋友转向了上位机开发,殊不知,最基础的PLC编程环境本身,也正在逐步融合C++等高级计算机语言的编程理念。
通过深入研读IEC 61131-3标准的第四版,这种体会尤为深刻。过去我们或许认为掌握梯形图、简单的图表式编程便已足够。但行业的发展催生了全能型人才的需求,不少工程师已经开始学习C#、C++、Python等语言并用于独立项目开发。
当前,一个明显的趋势是,PLC技术并未停滞,反而朝着AI化、虚拟化、云端化与边缘化等方向加速演进。
那么,最新的标准究竟带来了哪些具体更新?这些更新又将如何影响我们的编程思维?让我们一同探讨。

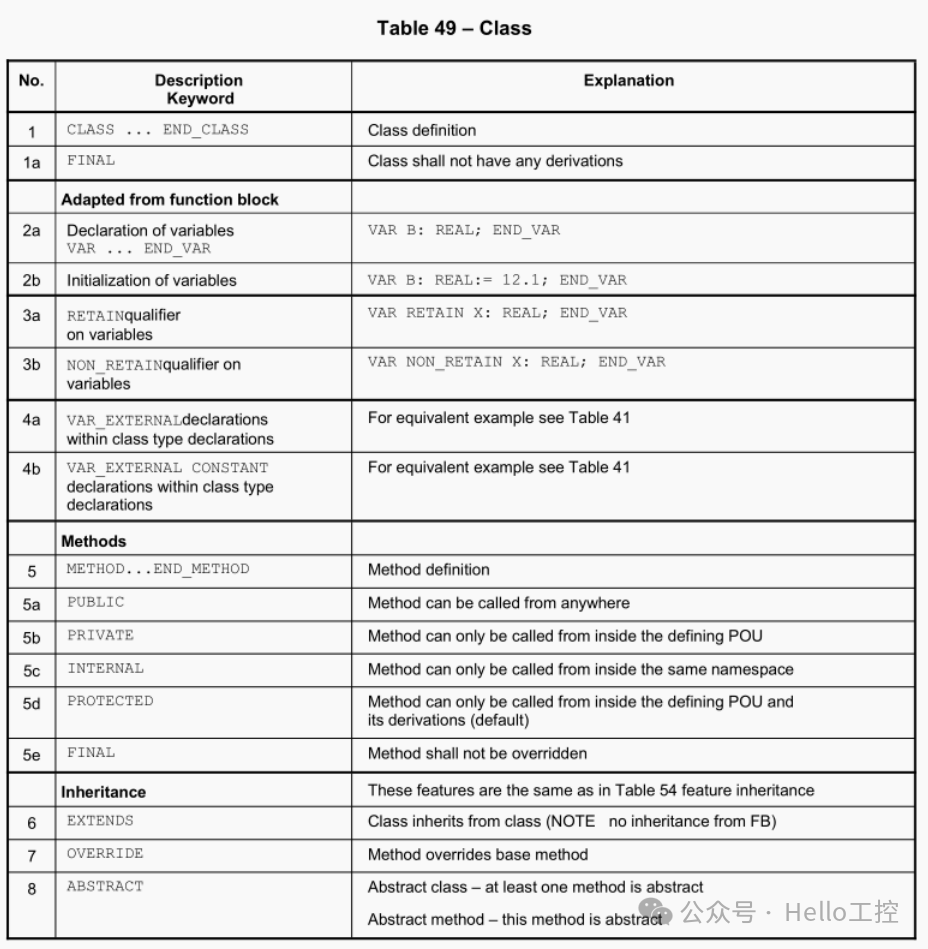
在IEC 61131-3第四版中,一个重大变化是允许使用Class(类)来实现传统的Function Block(功能块)。具体表现为:
- 传统的
FUNCTION BLOCK ... END_FUNCTION_BLOCK 关键字可以被 CLASS...END_CLASS 替代。
- 面向对象的编程技术(OOP)更加贴近通用计算机编程。诸如方法(Method)、属性(Property)、继承(Inheritance)、重载(Override)等术语,原本是IT领域的核心概念,如今正被系统地引入PLC编程语言中。
- 结构化文本(ST)语言的重要性日益凸显,因为梯形图等图形化语言难以实现下表中描述的复杂细节。
一个实际的CLASS定义示例如下所示:
CLASS CCounter
VAR
m_iCurrentValue: INT; (* Default = 0 *)
m_bCountUp: BOOL:= TRUE;
END_VAR
VAR PUBLIC
m_iUpperLimit: INT:= +10000;
m_iLowerLimit: INT:= -10000;
END_VAR
METHOD Count (* Only body *)
IF (m_bCountUp AND m_iCurrentValue < m_iUpperLimit) THEN
m_iCurrentValue:= m_iCurrentValue+1;
END_IF;
IF (NOT m_bCountUp AND m_iCurrentValue > m_iLowerLimit) THEN
m_iCurrentValue:= m_iCurrentValue-1;
END_IF;
END_METHOD
METHOD SetDirection
VAR_INPUT
bCountUp: BOOL;
END_VAR
m_bCountUp:= bCountUp;
END_METHOD
END_CLASS
那么,这段PLC-ST代码用经典的 C++ 如何实现呢?我们可以进行一个直观的对比:
头文件 CCounter.hpp :
// CCounter.hpp - C++头文件
#ifndef CCOUNTER_HPP
#define CCOUNTER_HPP
class CCounter {
private:
// 私有成员变量(对应VAR区域)
int m_iCurrentValue;
bool m_bCountUp;
public:
// 公共成员变量(对应VAR PUBLIC区域)
int m_iUpperLimit;
int m_iLowerLimit;
// 构造函数(带默认参数)
CCounter(int initialValue = 0, bool countUp = true,
int upperLimit = 10000, int lowerLimit = -10000);
// 公共方法
void Count(); // 计数操作
void SetDirection(bool bCountUp); // 设置计数方向
// Getter方法(提供私有成员的受控访问)
int GetCurrentValue() const;
bool GetDirection() const;
// 显示当前状态
void DisplayStatus() const;
};
#endif // CCOUNTER_HPP
实现文件 CCounter.cpp :
// CCounter.cpp - C++实现文件
#include "CCounter.hpp"
#include <iostream>
// 构造函数实现
CCounter::CCounter(int initialValue, bool countUp, int upperLimit, int lowerLimit)
: m_iCurrentValue(initialValue),
m_bCountUp(countUp),
m_iUpperLimit(upperLimit),
m_iLowerLimit(lowerLimit) {
std::cout << "CCounter对象已创建,初始值: " << m_iCurrentValue << std::endl;
}
// 计数方法实现
void CCounter::Count(){
if (m_bCountUp && m_iCurrentValue < m_iUpperLimit) {
m_iCurrentValue = m_iCurrentValue + 1;
}
if (!m_bCountUp && m_iCurrentValue > m_iLowerLimit) {
m_iCurrentValue = m_iCurrentValue - 1;
}
}
// 设置方向方法
void CCounter::SetDirection(bool bCountUp){
m_bCountUp = bCountUp;
}
// Getter方法实现
int CCounter::GetCurrentValue() const{
return m_iCurrentValue;
}
bool CCounter::GetDirection() const{
return m_bCountUp;
}
// 显示状态
void CCounter::DisplayStatus() const{
std::cout << "当前值: " << m_iCurrentValue
<< " | 方向: " << (m_bCountUp ? "向上" : "向下")
<< " | 范围: [" << m_iLowerLimit << ", " << m_iUpperLimit << "]"
<< std::endl;
}
主程序 main.cpp :
// main.cpp - 使用示例
#include <iostream>
#include "CCounter.hpp"
int main(){
std::cout << "=== PLC CCounter类C++实现示例 ===" << std::endl;
// 1. 使用默认构造函数
std::cout << "\n1. 创建默认计数器:" << std::endl;
CCounter counter1;
counter1.DisplayStatus();
// 执行计数
for (int i = 0; i < 5; i++) {
counter1.Count();
}
std::cout << "计数5次后: ";
counter1.DisplayStatus();
// 2. 使用带参数的构造函数
std::cout << "\n2. 创建自定义计数器:" << std::endl;
CCounter counter2(50, false, 100, 0); // 初始值50,向下计数,上限100,下限0
counter2.DisplayStatus();
// 3. 改变方向并计数
std::cout << "\n3. 改变计数方向并操作:" << std::endl;
counter2.SetDirection(true); // 改为向上计数
counter2.Count();
std::cout << "改变方向后计数1次: ";
counter2.DisplayStatus();
// 4. 直接访问公共成员(对应VAR PUBLIC)
std::cout << "\n4. 修改公共成员变量:" << std::endl;
std::cout << "原上限: " << counter2.m_iUpperLimit << std::endl;
counter2.m_iUpperLimit = 80; // 直接修改公共变量
std::cout << "新上限: " << counter2.m_iUpperLimit << std::endl;
// 5. 通过Getter访问私有成员
std::cout << "\n5. 通过Getter访问私有成员:" << std::endl;
std::cout << "当前值(通过Getter): " << counter2.GetCurrentValue() << std::endl;
std::cout << "方向(通过Getter): " << (counter2.GetDirection() ? "向上" : "向下") << std::endl;
// 6. 测试边界条件
std::cout << "\n6. 测试边界条件:" << std::endl;
CCounter counter3(99, true, 100, 0);
counter3.DisplayStatus();
counter3.Count(); // 应该增加到100
std::cout << "计数到上限后: ";
counter3.DisplayStatus();
counter3.Count(); // 应该保持100(已达上限)
std::cout << "再次尝试计数: ";
counter3.DisplayStatus();
return 0;
}
对比这两份代码可以看出,PLC的ST语言实现相对更为简洁,这也符合工业控制编程所追求的简单、易读、可靠的原则。这种面向对象的编程范式,无疑是下一代PLC系统演进的重要方向,毕竟最新的IEC标准已经将其纳入规范。接下来,就看哪家PLC厂商能率先推出完全基于第四版标准的产品。
从工业控制的根本需求出发,我们始终追求的是确定性、实时性、可靠性和对物理世界的直接控制能力,这是所有控制程序设计的核心准则。
既然这是技术发展的必然趋势,我们不妨主动学习其精髓,并尝试将其逐步融入到实际项目中。特别是在人工智能时代,这种融合趋势更加显著。它将真正解放PLC编程人员,使我们不再为繁琐的基础代码耗费精力,从而能将更多时间投入到系统架构、工艺优化等更具创造性的工作中去。理解这些编程范式的演变,是构建复杂可靠系统的重要计算机基础。
对于PLC编程引入OOP等高级特性,你有何看法?欢迎在云栈社区交流你的实践经验与见解。
 发表于 2026-1-19 09:14:11
|
查看: 289|
回复: 0
发表于 2026-1-19 09:14:11
|
查看: 289|
回复: 0
