一、PID功能概述
PID控制器,即比例-积分-微分控制器,是工业过程控制领域应用最广泛的闭环控制算法。它通过对设定值与实际反馈值的偏差进行比例、积分、微分运算,实现对温度、压力、流量、速度等模拟量的高精度、稳定控制。
汇川技术的H5U与Easy系列PLC均内置了成熟的PID功能块。这些功能块支持自整定、PWM脉冲输出、模拟量输出等多种控制模式,能够灵活应对各种工业场景的控制需求。
典型应用场景包括:
- 温度控制:如加热炉、恒温箱、注塑机的温度精准调控。
- 压力控制:如恒压供水系统、气动设备的压力稳定。
- 速度控制:如变频器驱动的电机调速、卷绕设备的张力恒定。
- 流量控制:如液体或气体管道流量的精确调节。
二、PID指令格式与参数说明
1. PID指令格式(梯形图)
在汇川的AutoShop编程软件中,PID指令以功能块形式调用,通常集成在系统库中。主要提供两种类型的指令:
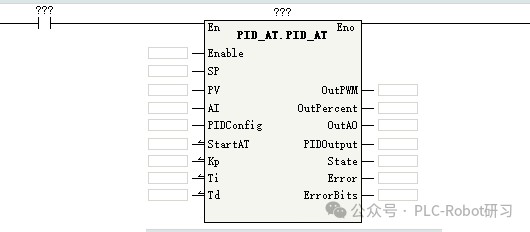
一种是支持模拟量输出的通用标准PID指令,其功能块接口如下图所示:
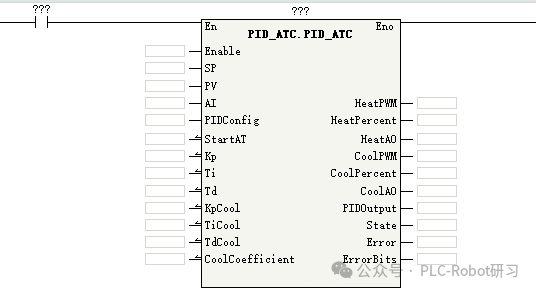
另一种是专门为温度控制(尤其是加热/冷却控制)优化的PID指令,功能更为丰富:
2. 核心输入/输出参数详解
调用PID功能块时,需要理解并设置以下关键参数:
- SP (SetPoint):设定值。期望系统达到的目标值,数据类型为
REAL(浮点数)。
- PV (Process Value):过程反馈值。来自传感器的实际测量值,数据类型为
REAL。
- AI:模拟量输入值。部分功能块允许直接输入整型模拟量地址,数据类型为
DINT。
- Kp:比例增益。决定控制器对当前误差的反应强度。设定范围通常为0.01至1000,值越大响应越快,但过大可能导致振荡。数据类型
REAL。
- Ti:积分时间(单位:秒)。用于消除静态误差,值越大积分作用越弱。设置为0时,关闭积分作用。设定范围通常为0.01至10000,数据类型
REAL。
- Td:微分时间(单位:秒)。用于预测误差变化趋势,抑制超调,值越大微分作用越强。设置为0时,关闭微分作用。数据类型
REAL。
- OutPWM:PWM脉冲输出使能。设置为
TRUE 时,功能块将输出PWM脉冲信号;FALSE 时关闭。
- OutAO:模拟量输出值。功能块计算出的控制量,可直接关联到模拟量输出通道。
- State:运行状态字。用于显示PID功能块的当前工作状态,如是否处于自整定、是否出错等。
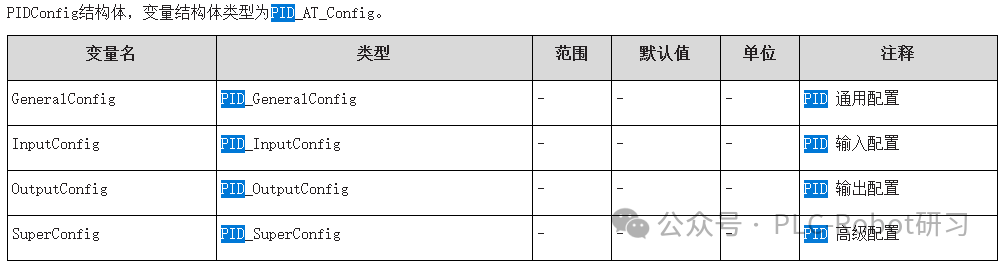
3. PID_Config结构体参数
除了上述基础参数,PID功能块通常需要一个 PID_Config 结构体来进行更细致的配置。该结构体内部通常包含通用配置、输入配置、输出配置和高级配置等子结构,方便对PID行为进行模块化管理。
4. StartAT自整定功能详解
汇川PLC的PID功能块一大亮点是集成了自整定(Auto-Tuning)功能。启动自整定后,系统能自动分析被控对象特性,并计算出相对较优的 Kp、Ti、Td 参数,极大简化了工程师的调试工作。
自整定执行条件(以加热控制为例):
- 当前过程值(PV)低于设定值(SP)。建议SP设置为设备常用的工作温度。
- 将
StartAT 引脚置为 TRUE,触发自整定过程。
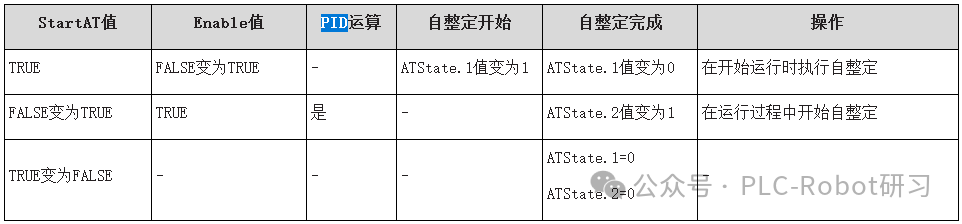
StartAT 信号与系统状态、自整定过程的逻辑关系如下表所示:
使用提示:
PID控制的核心原理与参数整定方法(如临界比例度法、衰减曲线法)是通用的,在基础 & 综合知识领域有深入探讨。如果你已经熟悉西门子、三菱等品牌PLC的PID应用,那么在汇川PLC上主要需要适应其特定的功能块调用方式和参数接口,其底层的控制逻辑和调试思路是相通的。掌握一种,便能更快地触类旁通。 |  发表于 2026-3-1 06:58:21
|
查看: 1759|
回复: 1
发表于 2026-3-1 06:58:21
|
查看: 1759|
回复: 1

