最近在项目中初次接触CAN通讯,系统学习了CAN 2.0A协议的相关知识。与深入协议底层细节不同,本文旨在从纯应用开发的角度出发,对CAN 2.0A的定义、核心规则、帧结构以及常见问题进行梳理和总结,希望能为同样初涉此领域的开发者提供一个清晰、实用的入门参考。
一、什么是CAN 2.0A协议?
CAN,全称Controller Area Network(控制器局域网),是由博世公司在1986年推出的串行通信协议。它的核心设计目标是在多个设备间实现可靠、实时的通信。最初主要应用于汽车电子领域,如今已广泛扩展至工业自动化、智能设备等诸多场景。
CAN 2.0规范主要分为两个子版本:2.0A和2.0B。简单来说,CAN 2.0A仅支持11位标识符的标准帧,而CAN 2.0B则在兼容标准帧的基础上,增加了对29位标识符的扩展帧的支持。为了聚焦于基础概念,本文内容将完全围绕CAN 2.0A展开,不涉及2.0B及更高阶的CAN FD等协议。
因此,我们可以将CAN 2.0A理解为CAN通信协议的基础版本。它结构简洁、硬件实现要求相对较低,非常适合作为初学者理解多节点、差分总线通信原理的起点。
二、CAN 2.0A协议规定了什么?
从应用配置的角度看,CAN 2.0A协议的核心规定可以归纳为以下四点,这几点也是我们在项目实践中必须遵循的准则:
- 物理层规定:总线采用
CAN_H和CAN_L两根差分信号线进行数据传输。为确保信号完整性,防止反射干扰,总线两端必须各接一个120Ω的终端电阻。
- 标识符(ID)规定:仅支持11位标准ID,其数值范围为0x000至0x7FF,共计2048个唯一ID。这个ID不仅用于区分不同报文,也直接决定了报文在总线上的优先级(数值越小,优先级越高)。同一总线上不允许出现ID冲突的报文。
- 数据长度规定:数据帧的有效负载(数据场)长度被严格限定为0到8个字节。任何企图发送超过8字节数据的操作都将被视为不符合协议规范,无法成功传输。
- 通信机制规定:采用多主、非破坏性仲裁的通信方式。所有节点地位平等,无中心主机调度。当多个节点同时发起通信时,它们会通过比较ID进行仲裁,优先级低的节点会自动退出发送,且不会破坏正在传输的数据。此外,诸如CRC校验、应答、错误帧处理等复杂流程均由硬件控制器自动完成,极大简化了软件开发者的负担。
三、CAN 2.0A帧结构与帧类型
协议总共定义了5种帧类型,但对于大多数应用开发者而言,唯一需要主动配置和处理的只有数据帧。其他帧类型均由CAN控制器硬件根据总线状态自动产生和处理。
帧类型1:标准数据帧(唯一需要用户配置的帧)
标准数据帧是我们实际发送和接收业务数据的载体。其结构按照总线上的传输顺序排列,理解每个字段的功能是应用开发的关键。
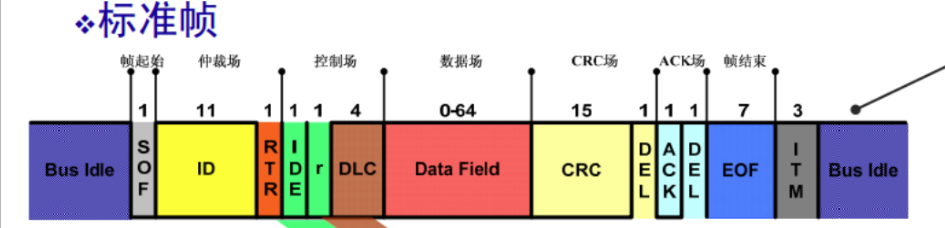
- 帧起始(SOF):1位,固定为显性电平(逻辑0)。它像一个“发令枪”,通知总线上所有节点一帧数据即将开始传输。此字段由硬件自动生成。
- 仲裁场:这是帧的核心部分,包含 11位ID 和1位RTR位。ID用于标识和仲裁;RTR位在数据帧中固定为显性(0),以示与远程帧的区别。
- 控制场:共6位,包含:
- IDE位:固定为显性(0),表明此帧是标准帧(而非扩展帧)。
- 保留位:1位,必须为显性(0)。
- DLC位:4位,需要手动配置,用于指明后续数据场的长度(0-8字节)。
- 数据场:长度由DLC指定,范围0-8字节。这里存放实际要传输的应用数据或指令,是通信的最终目的。
- CRC场:包含15位CRC校验码和1位隐性界定符。由硬件自动计算和校验,用于检测数据传输过程中是否发生错误。
- ACK场:包含ACK槽和ACK界定符。接收节点在正确接收到数据后,会在ACK槽位置发送一个显性电平进行应答。此过程完全由硬件自动处理。
- 帧结束(EOF):7位隐性电平(逻辑1),标志本帧传输结束,由硬件自动生成。
小结:在实际开发中,我们配置一个CAN数据帧,通常只需要关心三件事:设置11位ID、指定DLC数据长度、填充数据场内容。其余所有字段的组装、发送、校验和应答,都由CAN控制器硬件完美代劳。这体现了CAN协议将复杂网络通信协议机制硬件化的设计智慧,极大降低了软件复杂度。
帧类型2~5:远程帧、错误帧、过载帧、帧间隔(无需用户配置的帧)
这几种帧从应用层面看,仅需了解其作用即可,硬件会自动管理它们。
- 标准远程帧:用于向特定ID的节点请求数据。其结构与数据帧类似,但RTR位为隐性(1),且没有数据场。在实际应用中,远程帧的使用频率极低。
- 错误帧:当任何一个节点检测到总线错误(如位错误、格式错误等)时,会立即自动发送错误帧,强制终止当前传输,通知所有节点进入错误状态以进行后续处理。
- 过载帧:类似于“流控”信号。当某个接收节点内部处理速度跟不上数据到达速度时,会自动发送过载帧,意在请求发送方延迟发送后续数据帧。在现代高性能MCU系统中,此帧已较少出现。
- 帧间隔:用于分隔连续的数据帧或远程帧,由硬件自动插入的一段隐性位间隔,保证总线节点间的同步,对应用层完全透明。
四、CAN 2.0A协议的核心特点
基于以上内容,我们可以总结出CAN 2.0A协议的几个突出特点,这些特点也解释了它为何能在严苛的工业与汽车环境中经久不衰:
- 多主对等:总线无中心主机,任何节点在总线空闲时均可主动发起通信。
- 非破坏性仲裁:基于ID的优先级仲裁机制,解决了总线冲突问题,且不会造成数据损坏。
- 抗干扰能力强:差分信号传输方式,对共模噪声有天然的抑制作用。
- 高可靠性:硬件集成完善的错误检测(CRC)、确认和故障隔离机制,应用层无需编写复杂的错误处理代码。
- 结构简洁:仅需两根双绞线,布线简单,系统易于搭建和维护。
五、初学者的常见问题与排查思路
在实际动手调试CAN总线时,以下几个问题是新手最容易遇到的“坑”:
- ID冲突:总线中所有报文的ID必须是唯一规划的。如果两个节点使用了相同的ID发送报文,将导致不可预知的通信故障和数据丢失。务必在系统设计阶段就规划好ID分配表。
- 终端电阻缺失:这是导致通信不稳定、丢帧甚至完全无法通信的最常见原因。务必检查总线两端是否准确接入了120Ω终端电阻。
- 波特率不匹配:总线上所有节点的通信波特率必须严格一致(如500Kbps、1Mbps)。发送与接收方波特率不同将直接导致通信失败。
- 差分线接反:将
CAN_H和CAN_L两根线接反,通常会导致无法建立正常通信。
- 数据超长:试图发送超过8字节的数据。这在CAN 2.0A协议下是无效操作,需要由应用层进行分包处理。
希望这份从应用视角整理的笔记,能帮助你快速把握CAN 2.0A协议的要领。学习过程中,多动手实践,多观察总线数据,是理解这类基础 & 综合通信原理的最佳途径。如果在实践中遇到其他有趣的问题或心得,也欢迎在云栈社区与大家交流分享。 |  发表于 2026-4-5 00:20:35
|
查看: 184|
回复: 0
发表于 2026-4-5 00:20:35
|
查看: 184|
回复: 0
