在工业自动化领域,进行基于时间的运动控制编程时,一个常见且关键的问题是:如何精确计算伺服电机从起点运动到目标位置所需的时间?例如,给定速度 Vel=100,加速度 Acc=100,减速度 Ade=100,目标位置 pos=1000,电机究竟需要运行多久才会停止?本文将通过一个具体的算法推导和 ST语言 的函数块实现,来解答这个问题。
核心算法公式推导
首先,我们定义算法所需的变量与公式。整个计算过程基于一个中间变量 f,它代表了在给定的加减速能力下,电机从零速加速到目标速度 v 并立即减速到零所需的理论最短距离。
中间变量 f 的计算公式如下:
f = (a + d) * v² / (2 * a * d)

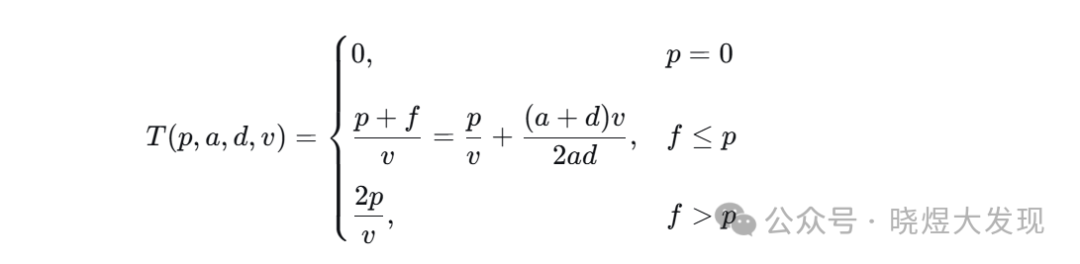
基于这个中间变量 f,我们可以得到总的运行时间 T。它是一个分段函数,具体取决于目标位置 p 与 f 的关系。
总运行时间 T(p, a, d, v) 的分段公式为:
T(p, a, d, v) = {
0, p = 0
(p + f) / v = p/v + (a + d)v/(2ad), f ≤ p
2p / v, f > p
}
公式中各个参数的含义与约束:
p 为目标位置(计算时取绝对值,且 p ≥ 0)。a 为加速度(若输入值非正,则取默认值 100)。d 为减速度(若输入值非正,则取默认值 100)。v 为运行速度(若输入值非正,则取默认值 100)。
该分段函数的程序逻辑是:当目标位置为 0 时,时间显然为 0。否则,判断理论加减速距离 f 与实际位置 p 的大小。
- 若
f ≤ p,说明有足够的距离让电机完成加速到 v 并减速到零的完整过程,总时间等于匀速段与加减速段的耗时之和。
- 若
f > p,说明距离不足以让电机加速到最大速度 v,它将经历一个“三角形”速度曲线(加速后立即减速),总时间由 2p / v 决定。
使用ST语言实现
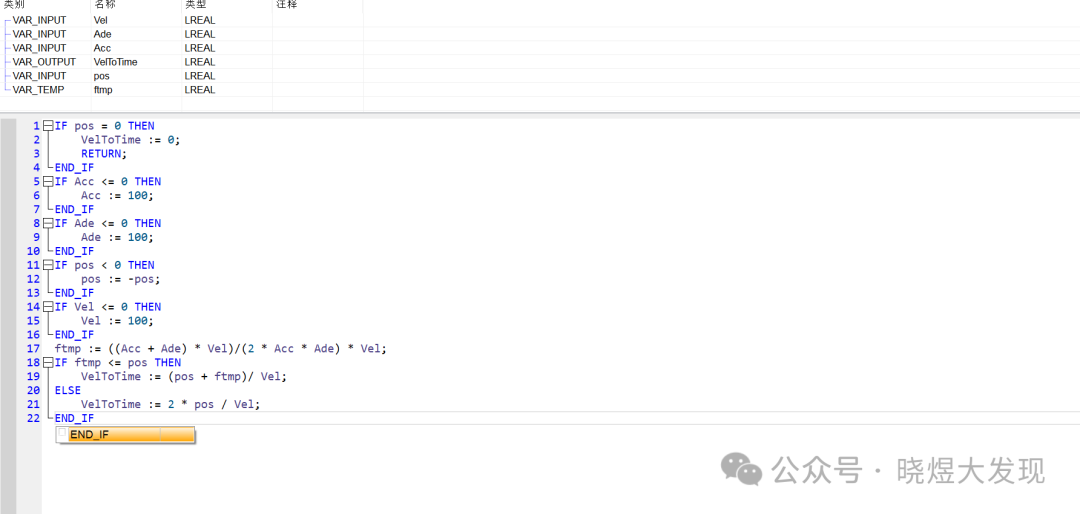
理解了数学模型后,我们将其转化为可嵌入 PLC 程序的功能块。以下是使用 ST语言 (Structured Text) 编写的函数块 FC_VelToTime 的核心逻辑代码。
IF pos = 0 THEN
VelToTime := 0;
RETURN;
END_IF
IF Acc <= 0 THEN
Acc := 100;
END_IF
IF Ade <= 0 THEN
Ade := 100;
END_IF
IF pos < 0 THEN
pos := -pos;
END_IF
IF Vel <= 0 THEN
Vel := 100;
END_IF
ftmp := ((Acc + Ade) * Vel)/(2 * Acc * Ade) * Vel;
IF ftmp <= pos THEN
VelToTime := (pos + ftmp) / Vel;
ELSE
VelToTime := 2 * pos / Vel;
END_IF
这段代码严格实现了上述分段函数的逻辑,包含了参数的有效性检查和默认值处理。
功能应用与验证
在实际编程中,我们只需调用这个封装好的函数块,并传入速度、加减速度和目标位置参数,即可直接获得计算出的运行时间。
例如,在程序中调用:
FC_VelToTime(Vel := 100, Ade := 100, Acc := 100, VelToTime => FC_ss, pos := 1000);
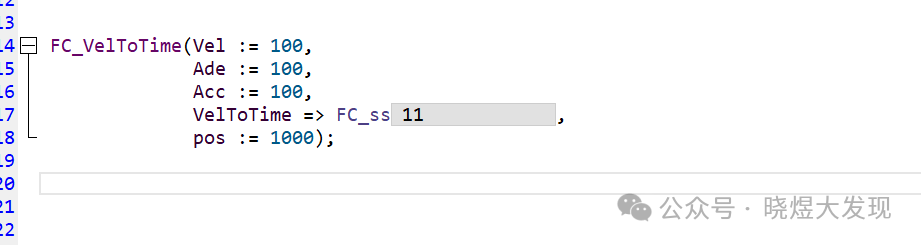
执行后,输出变量 FC_ss 的值恰好为 11。通过模拟或实际运行可以验证,伺服电机刚好在 11 秒后精确停止在目标位置 1000 处。
这个计算功能有广泛的应用场景,例如在需要严格时间同步的多轴协调运动、在特定时间窗口内完成工艺流程等时间编程任务中,它都是至关重要的基础工具。
资源获取
为了方便大家验证和使用,这里提供了实现该算法的 ST语言 函数块文件。有兴趣的工程师可以下载并在自己的项目中测试,共同探讨公式和实现的准确性。
下载链接:https://pan.quark.cn/s/825341b16956
结语
本文从物理原理出发,推导了伺服电机在梯形速度曲线下的运行时间算法,并提供了完整的 ST语言 工业实现。掌握这种从理论到实践的转化能力,对于深入理解运动控制核心和解决复杂工程问题至关重要。希望这个具体的案例能为你带来启发。欢迎在专业的开发者社区分享你的实践心得或提出更深入的优化思路。
 发表于 2026-4-5 05:13:44
|
查看: 145|
回复: 0
发表于 2026-4-5 05:13:44
|
查看: 145|
回复: 0
