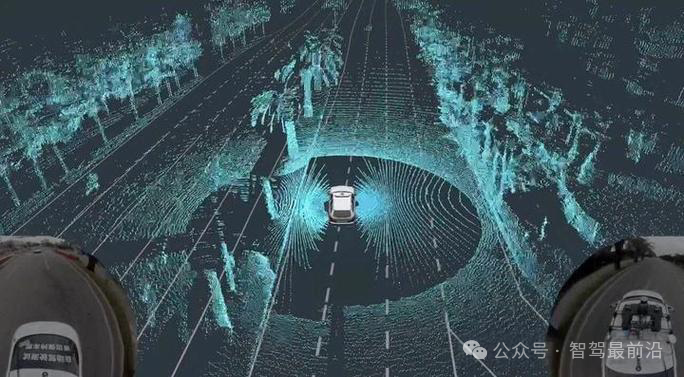
在自动驾驶系统中,激光雷达是关键的感知传感器。它通过发射激光束并接收物体反射信号,精确计算光线飞行时间(ToF),从而获取周围物体的距离、形状与位置信息,最终生成描述环境的三维“点云地图”。
图片源自:网络
相较于摄像头和毫米波雷达,激光雷达受环境光线影响小,且能提供分辨率更高的空间数据,对于路况判断、障碍物规避与路径规划至关重要。激光雷达根据内部扫描结构可分为不同类型,本文将重点解析机械式激光雷达与半固态激光雷达的工作原理及差异。

机械式激光雷达的工作原理
机械式激光雷达是早期自动驾驶测试车的常见配置,其外观通常为车顶的桶状或圆盘状装置。其核心工作原理是通过电机驱动整个光学收发模块进行360°连续机械旋转。
图片源自:网络
在这种设计中,激光发射器与接收器(或反射镜片)作为一个整体旋转,使激光束像扫描仪一样对水平方向进行全景覆盖,并配合多线束设计实现垂直方向的扫描。这种机制能单设备获取车辆周围完整的高精度数据,点云密度与测距精度表现优异,视野开阔,因此在诸多高级别自动驾驶原型车上被广泛应用。
然而,其弊端也源于机械结构:
- 可靠性挑战:依赖电机、轴承等持续运动的机械部件,长期在震动、温变等车载恶劣环境下易磨损,其寿命与可靠性难以满足车规级(数万至十万小时)的严苛要求。
- 集成与成本问题:较大的旋转结构需要安装在车顶以获得无遮挡视野,影响车辆空气动力学与外观设计。复杂的精密机械结构也导致其制造成本高,难以规模化量产。

半固态激光雷达的工作原理
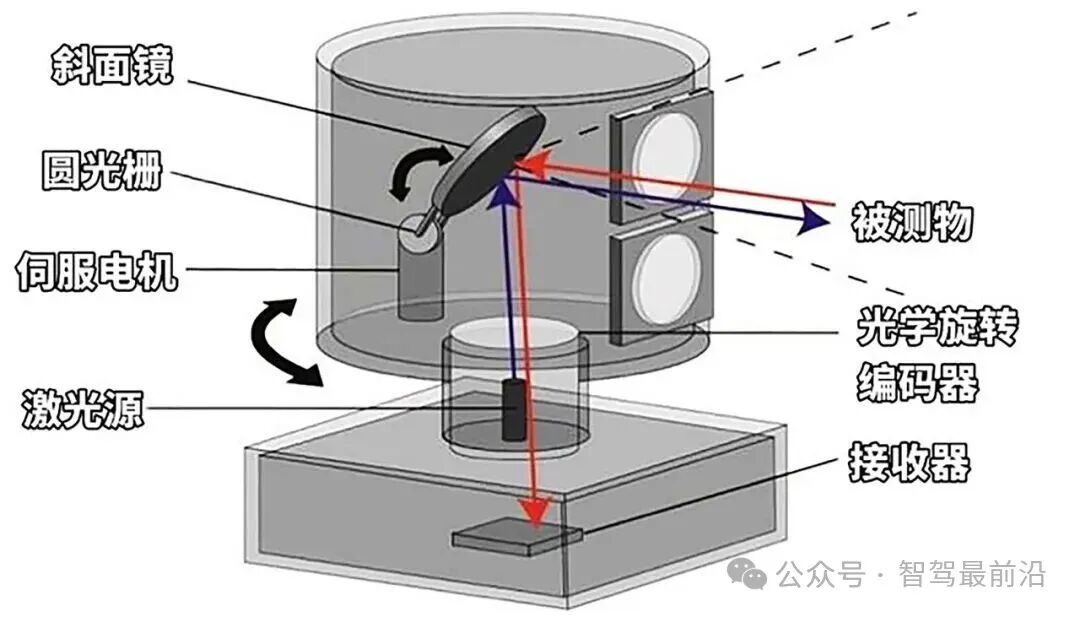
当前量产自动驾驶车型多采用半固态或固态激光雷达。“半固态”意指其核心激光收发模块固定不动,仅通过微型机械部件(如振镜、旋转镜)来偏转激光束方向,实现扫描。
图片源自:网络
以常见的转镜方案为例,激光发射/接收单元静止,前方的小型反射镜进行特定形式的往复旋转或振动,以此改变激光出射角度。这种方式在保持扫描灵活性的同时,极大地减少了机械运动幅度与部件数量。

机械式与半固态的根本结构区别
两者的本质区别在于实现扫描的物理方式:
- 机械式:整体旋转。激光发射与接收模块作为一个整体进行大范围机械旋转。
- 半固态:镜面反射。激光收发模块固定,通过微动镜面反射激光束完成扫描。
结构差异带来一系列衍生影响:
机械式雷达需要处理高速旋转带来的振动、摩擦与散热,结构复杂。半固态雷达由于运动部件大幅减少,磨损点少,结构更紧凑稳定,更易达到车规级可靠性标准,也便于实现模块化设计与规模化生产。

图片源自:网络
车企为何更青睐半固态激光雷达?
车企在量产车型上的传感器选型,需综合权衡性能、成本、可靠性与集成度。
- 更高的可靠性与车规符合性:车辆常年经历复杂环境考验,机械结构越简单,失效风险越低。半固态设计机械运动少,整体更稳定,更易通过严苛的车规认证,匹配整车质保周期。
- 更优的成本控制:机械式雷达结构复杂、定制化程度高、装配精密,成本居高不下。半固态雷达结构相对简化,更利于供应链管理和规模化降本,这对追求经济性的量产车至关重要。
- 更好的整车集成性:机械式雷达常需突兀地外置于车顶。半固态雷达凭借紧凑体积,可嵌入车身前脸、翼子板等位置,实现隐藏式安装,兼顾美观、低风阻与传感器保护。

图片源自:网络
尽管全固态激光雷达(无任何机械运动)是更终极的方向,但其在视场角、测距能力及工艺成熟度上仍面临挑战。目前,半固态方案在性能、成本、可靠性和集成便利性之间取得了最佳平衡,因此成为车企推进自动驾驶量产的主流选择。
车企的选择逻辑是务实的:半固态激光雷达并非在所有性能指标上均优于机械式,而是在满足基本性能需求的前提下,在商业化量产的综合得分上更高。

总结
机械式激光雷达通过“以机械换视野”,实现了优良的点云覆盖与质量,但其优势紧密捆绑于复杂的机械结构,导致其在可靠性、成本和集成方面难以满足量产车要求。半固态激光雷达通过减少机械运动,在保留有效扫描能力的同时,显著提升了可靠性、经济性与整车融合度,这正契合了自动驾驶技术从实验室Demo走向规模化商业落地的核心诉求。 |  发表于 2025-12-19 17:43:53
|
查看: 241|
回复: 0
发表于 2025-12-19 17:43:53
|
查看: 241|
回复: 0
