在自动驾驶技术领域,“中间表达”是一个常被提及却又略显抽象的概念。相较于激光雷达、摄像头等硬件,或是大模型、端到端等算法概念,它究竟指什么?在系统中又扮演着何种角色?
什么是中间表达?
要理解“中间表达”,可以从系统处理的信息流入手。自动驾驶系统中的传感器提供了形式各异的数据:摄像头输出彩色图像,激光雷达提供三维点云,毫米波雷达返回目标距离和速度,GPS和惯性测量单元则给出位置与运动状态。这些原始数据虽然包含了环境的丰富细节,但体量大、形式杂,难以直接用于决策。因此,系统需要将原始输入转化为更便于后续模块推理和利用的信息。
车辆从各类传感器获取大量原始数据后,必须经过一系列处理,才能将其转化为准确、可用的信息。这些经过处理、介于原始数据与最终驾驶决策之间的数据或信息层,便是我们所说的“中间表达”。
例如,从传感器图像和点云中识别出的一条车道线位置、后方车辆的相对速度和距离,或是一个红绿灯的当前状态,都属于中间表达。它们比原始像素或点坐标更具语义,但尚未形成最终的控制指令,相当于系统对现实世界的“理解与摘要”。通过这种转换,自动驾驶系统能将注意力聚焦在对行驶有实际影响的环境要素上,减少对无关细节的依赖。
中间表达有时也被称为中间表示,这与编译器中使用的中间语言概念有相似之处,二者都是位于原始输入与最终输出之间的抽象层,旨在提升整个处理流程的效率与可分析性。对于自动驾驶而言,一个优秀的中间表达必须在保留关键信息的前提下,让后续模块能更轻松、更准确地进行预测和规划。
简而言之,中间表达在自动驾驶系统中承担着将原始数据加工为高价值信息的职责。其形式多样,可以是二维场景的语义描述、三维空间中物体的位姿信息,也可以是对未来行为的预测。它既比原始感知数据更精炼,也比最终的控制指令更贴近对环境的理解。
中间表达在不同架构中的角色
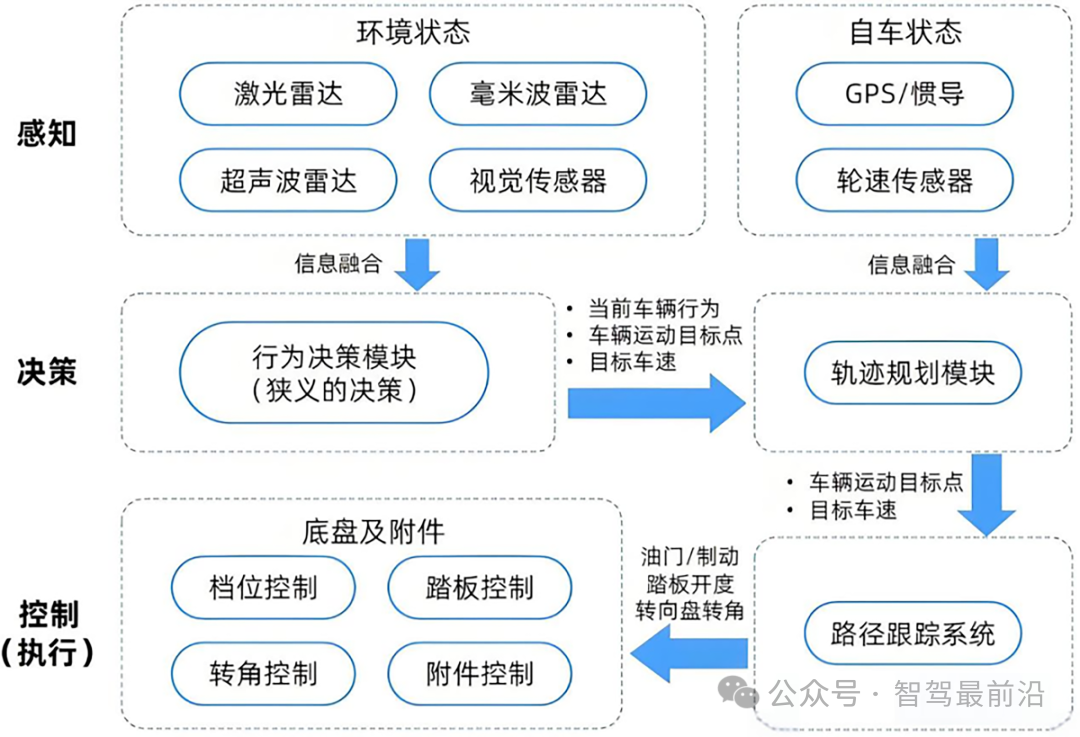
自动驾驶系统存在不同的实现架构,中间表达在其中扮演的角色也略有不同。在传统的模块化系统中,中间表达被显式地定义和传递。一个模块的输出会成为下一个模块的输入,这种清晰、可观测的信息流,使得系统更易于调试、验证和优化。
在这种架构下,感知模块输出的中间表达既包含静态特征(如车道线、障碍物位置),也包含动态特征(如物体速度、运动趋势)。这些信息以标准格式传递给预测模块,后者据此推断场景的未来变化。随后,规划模块会基于预测结果,制定出安全合理的车辆轨迹。模块化设计使得各环节可以独立开发与测试,一旦感知输出出错,其影响会清晰地传导至下游,便于快速定位和修复故障点。
目前,端到端架构应用日益广泛,这类系统试图跳过显式的中间模块,将传感器输入直接映射为控制输出。这种方式虽然能减少人工设计的复杂性,但也带来了“黑箱”问题——内部决策过程难以解释。没有明确的中间表达,就很难理解系统是依据哪些具体环境特征做出了特定决策,这对安全验证和系统调试构成了巨大挑战。
为了兼顾端到端学习的灵活性与系统的可解释性,业界提出了“两阶段式端到端”等方法。在这种架构中,网络首先学习将原始输入转换为一种对驾驶决策友好的中间表达,然后再基于此表达生成控制指令。例如,系统可以先输出语义鸟瞰图和预测轨迹点作为中间表达,再据此生成最终控制量。这种方式既保留了端到端学习的优势,又通过显式的中间表达提升了模型的可解释性与系统的可靠性。
中间表达的常见形式及作用
要更深入地理解中间表达,可以看看它在系统中的几种具体形式及其价值。不同形式的中间表达承载的信息侧重点不同,但共同目标都是将传感器信息转化为对后续任务更有帮助的数据。
一种常见形式是几何语义表达。它主要描述环境的空间结构,例如道路几何形状、车道线位置、路缘石位置、车辆和行人的边界框等。这类数据回答了“周围有什么”和“它们在哪”的问题,是规划模块决定车辆可通行空间与路径的基础。
另一种形式是语义理解表达。例如交通标志、红绿灯状态、道路类型等信息。这类表达帮助系统在行为决策时理解场景的语义规则。知道前方是红灯而非绿灯,系统就会选择停车,这种判断依赖于语义信息而非单纯的几何数据。

更高级的中间表达会包含动态预测信息。它不只描述当前环境,还能预测未来可能的变化。例如,系统根据当前车速和方向,预测前车在未来几秒内的可能位置,并附带概率估计。这类预测结果是规划模块进行决策的关键参考。缺乏动态预测,车辆只能基于瞬时状态做出反应,无法前瞻性地规避风险。
这些中间表达的设计与选用并非随意,而是基于自动驾驶在实际道路运行中所必需的核心认知与判断能力。优秀的中间表达能使系统在复杂、动态的道路环境中做出更精准、更安全的决策。
为什么关注中间表达对自动驾驶很重要
理解了中间表达,就能更深刻地认识自动驾驶系统的本质。它并非简单地将传感器数据抛给一个大模型就能自动得出指令,而是需要将原始数据转化为表征环境状态的信息,再基于此进行预测、规划与控制。中间表达不仅是工程实现中的信息桥梁,更是系统性能与安全的基石。
在模块化设计中,中间表达使各阶段功能清晰、易于验证。若某个表达在特定场景下不稳定,可以针对该环节进行针对性优化。这种清晰的分层也有利于与传统控制理论结合,从而提升系统整体的鲁棒性和可控性。
在数据驱动的方法中,明确的中间表达能提供更丰富的监督信号。在训练阶段,使用带标签的中间表达作为额外约束,可以引导模型不仅学会控制,更能正确理解场景本质,避免其只关注最终输出而忽略了对环境的正确认知。
中间表达的重要性还体现在安全性评估上。自动驾驶系统需经过海量测试验证才能上路,明确的表达有助于设计更全面的测试用例,覆盖更多极端场景,同时也使系统在特定场景下的弱点更容易被诊断和修复。
结语
中间表达是自动驾驶系统内部一种核心的信息结构,它连接了感知与决策,是整个系统理解环境并做出正确判断的关键。在不同的技术架构中,其形式与作用虽有差异,但都承担着将海量、原始的传感器数据转化为对未来行为有指导意义的信息这一重任。理解中间表达,有助于把握自动驾驶技术的设计逻辑、性能边界与工程实现。随着技术不断发展,中间表达的设计与优化仍将是值得持续深耕的重要方向。
 发表于 2026-1-18 08:23:36
|
查看: 201|
回复: 0
发表于 2026-1-18 08:23:36
|
查看: 201|
回复: 0
