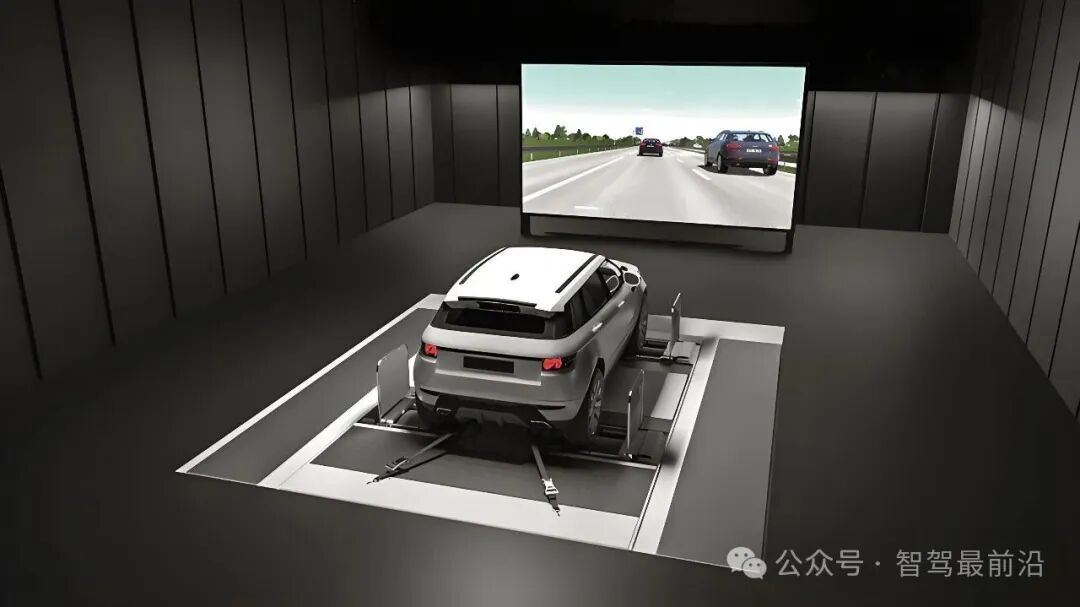
硬件在环(Hardware-In-the-Loop, HIL)本质上是一种将真实硬件(通常是控制器、执行器或传感器接口)置于由计算机实时模拟的虚拟车辆与环境中的测试方法。简而言之,就是把自动驾驶域控制器、传感器网关或制动ECU等真实组件,连接到一台“模拟的世界”中。虚拟的道路、交通参与者、传感器回波、定位信号被实时计算并发送给真实硬件,硬件据此做出决策(如下发制动指令),再将动作反馈回模拟器,从而形成一个完整的测试闭环。
将真实硬件接入虚拟世界,有两个关键要点:一是实时性,模拟必须以接近真实世界的时间尺度运行,否则控制器的时序和延迟表现将失真;二是接口还原,虚拟环境需通过各类总线、模拟信号甚至视频流,真实地驱动目标硬件的输入输出。HIL巧妙地将“实验室可控性”与“硬件真实性”结合,成为自动驾驶系统开发中不可或缺的一环。

HIL在自动驾驶开发中的关键作用
在自动驾驶开发周期中,HIL扮演着多面手的角色。它是快速验证控制逻辑与硬件接口的试金石。自动驾驶控制器与底层执行单元之间存在海量的消息、状态和时序要求,若仅依赖纯软件仿真,其接口匹配性和异常处理能力难以得到充分保证。将真实控制器接入HIL平台,即可在可控场景中观察硬件在不同工况下的反应、总线负载情况及异常处理流程,从而在早期发现接口不匹配、时延超限或异常状态覆盖不全等问题。
 (图片源自网络)
(图片源自网络)
HIL能够对极端与罕见场景进行高密度、可重复的测试。真实道路上的某些边缘情形出现概率极低,但对安全影响极大,例如冰面打滑下的多轴失效、复杂交叉口的多方决策冲突、多个传感器同时被遮挡等。HIL可以在短时间内将这些场景反复运行数千次,观察控制器行为、记录失败模式、调优安全策略,有效降低后期产品上市的潜在风险。
HIL还是连接模型仿真(MIL/SIL)与实车道路测试的关键桥梁。在典型开发流程中,算法先在模型环或软件环中进行逻辑验证,随后推进到HIL,将真实硬件纳入验证链路,最后才进入实车测试。这种分层验证策略不仅大幅节省成本,也显著降低了将问题带至真实车辆的概率。同时,HIL也是回归测试与持续集成的重要工具,每次软硬件变更后,都可在HIL上运行自动化回归场景,及时捕捉回归缺陷。
HIL对于合规与功能安全验证至关重要。在ISO 26262功能安全框架下,随着开发进入高安全等级(ASIL)要求,必须对硬件/软件在失效情况下的行为进行充分论证与测试。HIL能够模拟传感器失效、通信丢包、执行器迟滞等故障,检验系统的诊断、降级或安全停车(fallback)逻辑是否符合安全要求。对于SOTIF相关的场景边界与未知失效模式,HIL也提供了一个高度可控的试验平台。

实施HIL测试的技术要点与常见做法
要让HIL测试发挥最大价值,需要把握多项技术细节。实时仿真能力是首要基础。这不仅要求“跑得快”,更要求仿真平台必须在固定步长内完成车辆动力学、传感器模型和环境逻辑的所有计算,并在严格的时间窗口前将数据输出给真实硬件。控制器的运行频率通常在几十到几百赫兹,部分底层控制回路甚至要求千赫兹级别的更新频率,因此仿真平台的计算链路、操作系统调度和网络传输都需要精心设计,以避免抖动(jitter)和超时。
传感器建模是HIL成败的核心之一。摄像头、激光雷达、毫米波雷达、超声波、GNSS/IMU等,每类传感器的物理特性各异,模拟方式也大不相同。对于摄像头,逼真的图像流(包含光照变化、雨雪、运动模糊)对感知算法验证至关重要;对于雷达,回波模型需考虑多径效应、反射强度和噪声;对于定位系统,仿真需支持差分定位、信号遮挡导致的跳变等。常见的做法是将传感器仿真与物理引擎耦合,或采用基于真实数据回灌的方式来校准模型,以提升感知层在HIL中的可信度。
 (图片源自网络)
(图片源自网络)
接口与协议层的还原同样关键。自动驾驶系统中常见的通信方式包括CAN、Ethernet(含车载以太网AVB/TSN)、FlexRay、LIN以及各类模拟/数字I/O。HIL平台需能模拟这些总线的负载、时延、帧丢失和优先级冲突。特别是在多域控制器和域网关互联的架构下,总线拥塞或优先级倒置会直接影响控制决策,HIL可以提前暴露这些系统级问题。
故障注入是HIL的强项。可以在仿真中定义传感器噪声突增、通信丢包率提高、执行器信号饱和、电源瞬变等故障,进而观察整车控制器的降级策略是否按预期工作。优秀的HIL测试不仅关注“系统能否完成任务”,更会检验“系统在不理想条件下能否安全退出”,这正是自动驾驶安全设计的核心。
自动化与度量是提升HIL效率的另一关键。成熟的HIL实验室会将场景库、回归套件、数据采集和结果判定自动化,测试结束后自动生成并归档报告。常用的性能度量指标包括决策延迟、控制稳态误差、轨迹跟踪偏差、碰撞概率估计,以及在故障触发下的安全完成率等。这些指标需要通过可复现的脚本在基准场景中收集,以便进行长期对比和回归追踪。
最后需注意,不同层级的HIL测试侧重点不同。整车级HIL关注控制与执行在车辆动力学和车身系统耦合下的表现;传感器信号级HIL强调传感器回波与感知算法的交互;网络级HIL则用于评估域间通信与分布式决策的正确性。将这些层级组合成完整的验证链路,可以实现从模块到系统的逐步放大测试。

HIL的局限性与实车测试的互补
尽管HIL非常强大,但它并非万能。仿真模型不可能与真实环境完全一致,无论是车辆动力学、轮胎与路面的复杂相互作用,还是多变的光学现象和电磁干扰,模型总存在简化和假设。对于感知而言,真实世界的不可预测性(如偶发的强反光、镜头脏污、复杂背景物体)往往难以在仿真中被完全还原。因此,过度依赖HIL而忽视封闭场地和开放道路的实车验证,会带来“仿真通过但现实失效”的风险。
 (图片源自网络)
(图片源自网络)
某些硬件行为仅在物理世界中才会显现,例如电子元件在温度极限下的非线性失真、连接器物理松动导致的间歇性故障等,仅靠HIL难以完全覆盖。HIL能模拟信号层面的异常,但对这类物理失效的模拟需要结合环境试验(温湿度、振动)与硬件可靠性试验来补充。
因此,HIL的角色应定位为一个“高效的中间层”。在软件开发和硬件交付的早中期,利用HIL进行大批量、低风险、可重复的验证与回归;在产品走向成熟前,再将通过HIL验证的版本带入实车测试,用真实环境填补仿真的盲区。简言之,HIL将“危险与稀有事件”的验证搬入可控实验室,而道路测试则补全“真实世界的物理边界”,二者互为支撑,缺一不可。
总结:为什么HIL值得高度重视
将真实硬件置入模拟世界,这一构想看似简单,但在自动驾驶这样复杂且安全敏感的系统开发中,其带来的价值极为实际。HIL在缩短开发周期、降低测试成本、快速复现边缘场景、支撑功能安全论证以及实现自动化回归等方面,均发挥着不可替代的作用。它让自动驾驶系统能够在“零风险”的实验室内被逼问至极限并修补漏洞,从而将更稳定、更安全的版本推向最终的实车验证。
要把HIL用好,建议从项目初期就将HIL纳入整体验证策略,而非视作最后的准入门槛;建立可复用的场景库和自动化回归流程,实现测试的碎片化与持续执行;高度重视传感器模型与接口协议的真实性,特别是对感知和通信链路进行深入校准;将HIL的测试结果与实车试验数据交叉比对,形成“模型校正-仿真验证-实车验证-再校正”的迭代闭环;最后,始终保持对仿真局限性的清醒认识,将环境应力试验与长期的硬件可靠性试验作为必要的补充手段。

 发表于 2025-12-7 00:36:55
|
查看: 222|
回复: 0
发表于 2025-12-7 00:36:55
|
查看: 222|
回复: 0
