层级流水线并行 (Layer-wise Pipelining) 是 LMCache 和 DualPath 等先进 LLM 推理系统为了解决 KV Cache 存取延迟 和 显存容量限制 而采用的核心优化机制。它的核心在于将 KV Cache 的加载/存储与 GPU 的模型层级计算进行 并行化处理,从而掩盖 I/O 延迟并最大化系统吞吐量。
本文结合 LMCache 的工程实践与 DeepSeek DualPath 的学术研究,对这一关键技术进行深入解析。
近期,无论是 DeepSeek 在《DualPath》中提出的层级预填充(Layerwise Prefill),还是 LMCache 在工程实践中的实现思路,都在指向一个相同的演进方向:通过 KV-Cache 的层级流水线并行来缓解带宽压力、提升整体吞吐。这种学术探索与工程实践逐渐汇合的趋势,也正是我撰写本文的直接动机。
1. 核心概念
层级流水线并行是一种 计算与 I/O 重叠 (Computation-I/O Overlap) 的策略,在长上下文推理场景中,它常被具体化为 层级预填充 (Layerwise Prefill) 技术。
1.1 背景与动机
在处理长上下文的预填充 (Prefill) 阶段时,GPU 的 HBM 容量往往会成为瓶颈。
- 传统方式: 需要将整个批次 (Batch) 中所有层的激活值 (Activations) 和 KV Cache 都驻留在显存中。
- 导致后果: 这限制了可以同时处理的批次大小,导致 GPU 计算单元无法被填满,GPU 利用率低下。
层级流水线 则利用了 LLM 逐层计算 (Layer-by-Layer Execution) 的特性:
- 在 GPU 计算第
i 层时,系统在后台 同步加载 第 i+1 层的数据;
- 或者在后台 异步持久化 第
i-1 层的数据。
下图展示了普通推理与层级流水线推理的时间线对比:
注:在流水线模式中,“计算 Layer i” 的时间被用来掩盖 “加载 Layer i+1” 和 “存储 Layer i-1” 的 I/O 延迟。
2. 基本原理
层级流水线并行的实现依赖于 LLM 推理的计算局部性、硬件资源的解耦以及显存管理的优化。
- 计算局部性 (Locality) 与 逐层分配:
在模型的前向传播中,每一层仅需要其对应的层特定 KV Cache。这意味着系统不需要在显存中同时保存所有层的 KV Cache。
- 逐层分配与释放: KV Cache 可以在处理到特定层时才分配,并在该层计算完成后立即释放。
- 显存复用: GPU 在每一时刻仅需要持有当前正在计算的那一层的前向批次 KV Cache,极大地降低了峰值显存需求。
- 资源解耦 (Resource Decoupling):
- 利用 GPU 的 DMA 引擎 进行显存与主机内存 (H2D/D2H) 的传输;
- 利用 存储网卡 (SNIC) 进行主机与远程存储的 I/O;
- 利用 计算网卡 (CNIC) (如 RDMA) 进行节点间传输。
这些 I/O 操作可以与 GPU 的 Tensor Core 计算 异步执行,互不干扰。
- 显存节省 (Memory Savings):
通过逐层分配和释放 KV Cache 空间,显存只需持有当前正在计算的那一层 (或几层) 数据。这显著降低了显存占用,使得系统能够支持更大的 Batch Size (以 token 为单位,吞吐量提升约等于模型层数的倍数),从而提高 GPU 计算单元的利用率。
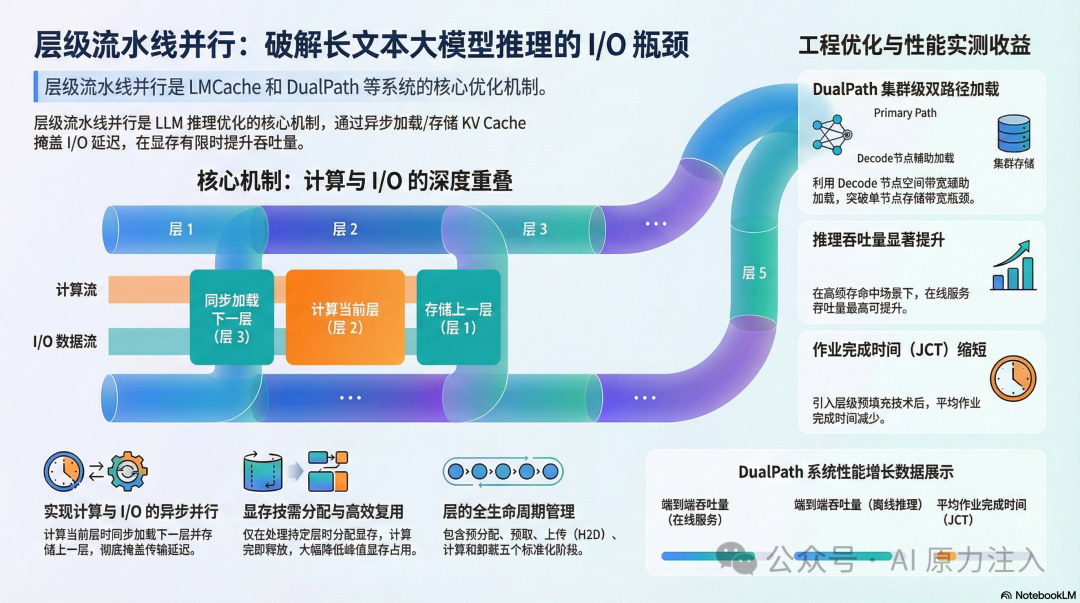
2.1 层的生命周期 (Life Cycle of a Layer)
在流水线中,每一层的 KV Cache 都会经历以下标准生命周期:
- 预分配 (Pre-allocate): 在推理开始前,在 CPU 内存中预留缓冲区。
- 预取 (Prefetch): 在计算前
k 步触发加载任务,数据从 L3/L4 存储流向 L1 CPU 内存。
- 上传 (H2D): 在计算当前层前,通过 PCIe/NVLink 将数据上传至 GPU 显存。
- 计算 (Compute): 参与 Attention 计算,生成新的 KV。
- 卸载/释放 (Offload/Free):
- 若需持久化,则通过 D2H 回传至 CPU 并写入存储。
- 若仅为推理,计算完成后立即释放显存空间给后续层使用。
3. LMCache 中的工程实现
LMCache 在集成到 vLLM 等引擎时,通过以下技术手段实现了这一机制,主要侧重于 降低首字延迟 (TTFT)。
3.1 生成器模式 (Generator Pattern)
LMCache 的存储和检索接口 (如 store_layer 和 retrieve_layer) 并不执行单一的阻塞操作,而是采用 Python 的 yield 机制构建流水线。
- 存储流程: 将存储任务拆解为细粒度步骤嵌入在模型每一层的计算循环中:
- 初始化 (计算 Hash);
- 等待上一层 D2H 完成;
- 启动当前层 D2H;
- 提交持久化任务。
- 检索流程: 构建 “生产者-消费者” 模型。
- 生产者: 负责从后端 (L1-L4 存储) 读取数据;
- 消费者: GPU 连接器 (GPU Connector) 负责将数据拷贝至显存。
# 伪代码示例:LMCache 的层级检索生成器
def retrieve_layer(self, tokens):
# 启动阶段:预取第 0 层和第 1 层 (Prefetch-2 策略)
prefetch(0); prefetch(1)
for i in range(num_layers):
# 消费者:等待第 i 层数据就绪 (可能已经在后台加载完毕)
layer_data = wait_for_layer(i)
# 生产者:触发第 i+2 层的预取 (保持流水线充盈)
# 当前在计算 i,利用计算时间掩盖 i+2 的 I/O
if i + 2 < num_layers:
prefetch(i + 2)
# 将第 i 层数据 yield 给计算引擎,进入计算阶段
yield layer_data
3.2 预取策略 (Prefetching)
为了最大化重叠效果,LMCache 采用了 “Prefetch-2” 策略,即始终保持 2 层 的预取深度:
- 启动阶段 (Warmup): 在开始计算前,立即触发 第 0 层 和 第 1 层 的加载任务。这是为了防止流水线初期出现 “气泡” (Bubble)。
- 掩盖延迟 (Overlap):
- 当 GPU 开始计算 Layer 0 时,I/O 系统已经在后台加载 Layer 2。
- 理想情况下,计算 Layer
i 的时间 T_comp 应大于或等于加载 Layer i+2 的时间 T_io。
- 流式协调 (Synchronization): 后续通过
wait_for_layer_load 在每一层计算前进行流式协调,确保数据就绪。如果 T_io > T_comp,则流水线会发生阻塞 (Stall)。
3.3 显存与内存管理
为了确保流水线在数据传输过程中不会因为频繁的内存分配而抖动,LMCache 实施了严格的内存管理策略:
- 全局预分配 (Global Pre-allocation): 在流水线启动前,LMCache 会一次性预分配所有层所需的 CPU 内存 (
MemoryObj),避免在推理关键路径上因频繁申请内存导致抖动。
- 同位置约束 (Same-location Constraint): 为了保证流水线的稳定性,系统强制要求同一 Key 的所有层级数据必须存储在同一个后端位置 (如都在磁盘或都在远程),不支持跨介质碎片化存储。这简化了预取逻辑,避免了多源数据合并带来的复杂性。
4. DualPath 中的演进
DualPath 将层级流水线并行从 单机 I/O 优化 扩展到了 集群级带宽调度,并针对分布式场景下的数据碎裂与流量竞争问题进行了深度优化。
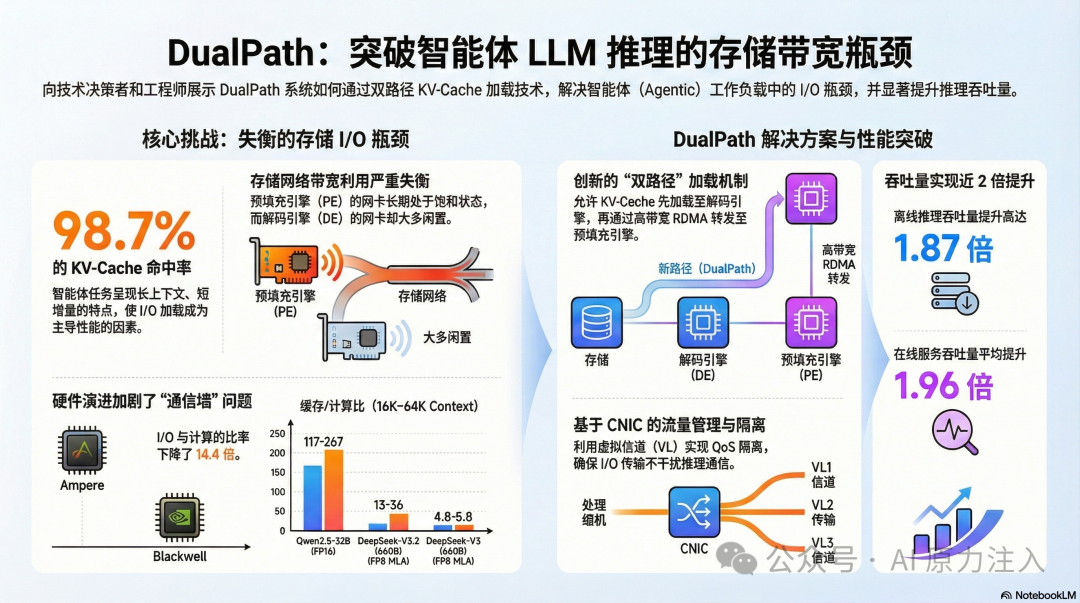
4.1 核心问题:存储 I/O 瓶颈与数据碎裂
- 存储带宽瓶颈: 在长上下文场景中,Prefill 阶段的 KV Cache 加载导致 Prefill 节点的存储网卡 (SNIC) 饱和。
- 数据碎裂: 层级执行会将 KV Cache 切分为大量细粒度的块 (fine-grained blocks),这可能带来传输和存储管理上的挑战。
4.2 双路径加载 (Dual-Path Loading)
为了平衡存储 I/O 压力,DualPath 引入了第二条加载路径,利用空闲的 Decode 节点带宽来辅助加载数据。两条路径的对比如下:
| 特性 |
PE Read Path (传统路径) |
DE Read Path (新增路径) |
| 数据流向 |
Storage → PE Buffer → PE HBM |
Storage → DE Buffer → PE HBM |
| 涉及网卡 |
Prefill 节点 SNIC |
Decode 节点 SNIC + 计算网络 (RDMA) |
| 瓶颈资源 |
Prefill 节点存储带宽 |
Decode 节点存储带宽 + 节点间 RDMA 带宽 |
| 适用场景 |
标准加载,小 Batch 或低负载 |
高负载、长上下文,Prefill 节点 I/O 饱和时 |
4.3 块布局优化 (Block Layout Optimization)
为了兼顾存储效率和传输效率,DualPath 设计了两种块布局:
- Full Block (全块): 包含所有层的数据。用于分布式存储交互,减少元数据开销。
- Layer Block (层块): 仅包含单层的数据。用于层级流式加载到显存中,支持细粒度的流水线执行。
4.4 流量隔离 (Traffic Isolation)
由于层级加载引入了复杂的计算网络流量,DualPath 采用以下技术确保 KV Cache 的搬运不会干扰对延迟敏感的模型推理通信:
- CNIC 中心化管理: 采用 计算网卡 (CNIC) 进行中心化流量调度。
- 虚拟信道 (VL): 利用 RDMA 的 Virtual Lanes 技术进行优先级划分,确保关键通信路径的低延迟。
5. 挑战与局限性
尽管层级流水线并行带来了显著的性能提升,但在实际工程落地中也面临诸多挑战:
- 同步开销 (Synchronization Overhead):
流水线需要精细的同步机制 (如 CUDA Events, Python AsyncIO)。过多的同步点可能会引入 CPU 开销,抵消部分重叠带来的收益。
- 网络抖动 (Network Jitter):
在依赖远程存储 (L4) 或 DualPath 跨节点传输时,网络延迟的波动可能导致流水线 “气泡” (Bubble)。一旦 I/O 延迟超过计算时间,GPU 就必须空转等待数据。
- 显存碎片 (Memory Fragmentation):
频繁的逐层分配和释放显存容易导致显存碎片。解决方案通常是使用预分配的内存池 (Memory Pool) 或 PyTorch 的 Caching Allocator。
- 复杂性 (Complexity):
将原本简单的串行加载逻辑重构为异步流水线,极大地增加了代码的复杂度和调试难度,特别是在处理异常 (如 I/O 失败) 和状态回滚时。
6. 性能收益
通过层级流水线并行及相关的架构优化,系统获得了显著的性能提升:
- 降低首字延迟 (TTFT): LMCache 通过 I/O 与计算的重叠,消除了显式的数据加载等待时间。
- 提升吞吐量:
- 显存效率: 逐层加载释放了显存压力,允许更大的 Batch Size (有效批次大小提升约等于模型层数的倍数)。
- 带宽利用率: DualPath 通过聚合集群内所有节点的存储带宽,解决了单节点 I/O 瓶颈。
- 实测数据:
- JCT 优化: 在 DualPath 系统中引入层级预填充后,平均可将作业完成时间 (JCT) 减少约 17.21%。
- 整体提升: 在 智能体 (Agentic) 等高缓存命中率场景下,DualPath 配合该技术将端到端吞吐量提升了高达 1.87 倍 (离线推理) 和 1.96 倍 (在线服务)。
7. 总结
层级流水线并行是一项从硬件底层出发、深入推理引擎内部的系统级优化技术。
- 核心价值: 它将原本串行的 “I/O 等待” 时间转化为有效的 “计算重叠” 时间,打破了存储带宽与计算延迟之间的硬性耦合。
- 演进路径: 从 LMCache 的单机显存优化,到 DualPath 的集群级带宽调度,该技术展示了在不同规模下解决 KV Cache 瓶颈的通用性。
- 未来展望: 随着大模型上下文长度的持续增长 (如 1M+ Context),层级流水线将成为未来推理系统的标配,并可能进一步结合预测性预取 (Speculative Prefetching) 和异构存储分层,以应对更极端的性能挑战。
像这样的深度优化技术,其讨论和实践往往在开发者社区中最为活跃。如果你想了解更多关于大模型推理优化、人工智能 系统架构的前沿探讨,欢迎来 云栈社区 交流,这里聚集了大量对技术充满热情的实践者。
8. 参考文献
- LMCache Documentation: LMCache 架构概览, LMCacheEngine 核心引擎代码分析.
- DualPath Paper: DualPath: Rethinking KV Cache Loading for Agentic LLM Inference (arXiv:2602.21548v2).
 发表于 2026-2-28 06:58:11
|
查看: 234|
回复: 0
发表于 2026-2-28 06:58:11
|
查看: 234|
回复: 0
