在工业自动化领域,运动控制的精度和实时性直接决定了设备性能与产品质量。其中,基于高性能工业以太网的EtherCAT多轴协同控制技术,已成为实现精密制造的关键。本文将深入剖析睿擎工业开发平台如何基于EtherCAT协议,实现微秒级低抖动与高精度的多轴控制。
一、EtherCAT技术:工业自动化的高速通信引擎
EtherCAT(Ethernet Control Automation Technology)是一种高性能的工业以太网技术,其核心优势在于颠覆了传统以太网的通信模式。与传统网络每个节点都需要完成接收、处理、转发三个步骤不同,EtherCAT采用“在线处理”机制。数据帧在通过每个从站节点时,设备会实时读取或写入分配给自己的数据,整个过程仅产生纳秒级延迟。
这种高效的通信机制赋予了EtherCAT以下显著特点:
- 高带宽利用率:通信速率可达100Mbit/s或1Gbit/s,有效数据利用率超过90%。
- 极低延迟:典型通信延迟在微秒级别,1000个数字量I/O的刷新时间仅需约30µs。
- 精确同步:借助分布式时钟(Distributed Clock, DC)技术,可实现多轴间的高精度时间同步。
- 拓扑灵活:支持线型、树型、星型及它们的组合,便于现场布线。
二、睿擎工业开发平台的EtherCAT技术突破
在睿擎平台上,EtherCAT技术的实现取得了多项关键进展,尤其在控制精度方面表现突出。
1. DC自动补偿:攻克多轴同步抖动难题
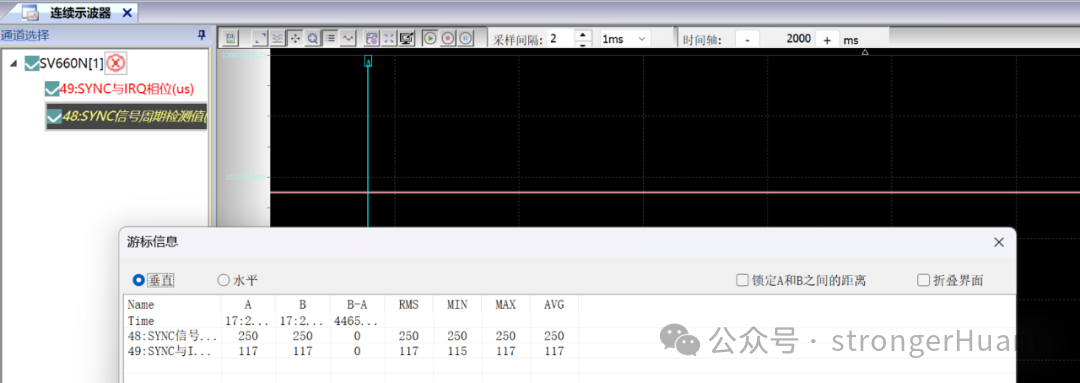
分布式时钟同步是实现高精度控制的基础,但在实际硬件环境中,时钟漂移和传输延迟会影响同步精度。睿擎平台内置了DC自动补偿功能,能够实时监测并校准各从站节点间的时间偏差。
技术指标:在250µs的控制周期下,系统将同步抖动稳定控制在±5µs以内。这意味着在多轴协同运动时,各轴间的动作相位差被严格限制在微秒级,极大提升了复杂轨迹控制的平滑性与准确性。
2. 多模式电机控制:适配多样化场景
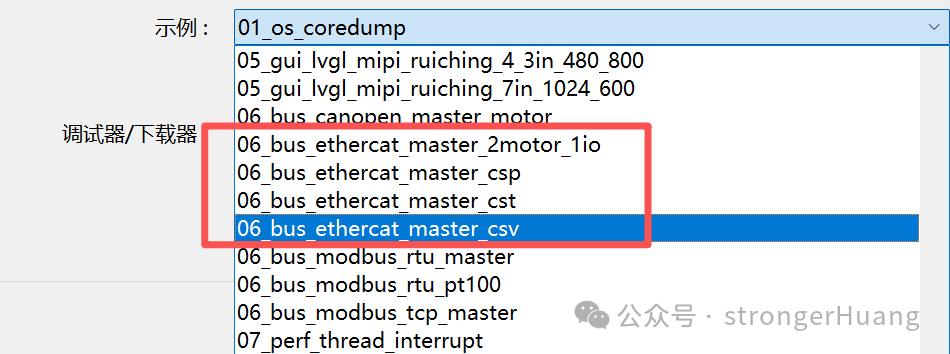
平台提供了丰富的EtherCAT主站示例,支持CSP(周期同步位置)、CSV(周期同步速度)及CST(周期同步转矩)等多种符合CiA 402协议的控制模式,满足从精准定位到力控的不同需求。
| 模式名称 |
模式值(hex) |
主要应用场景 |
| 周期同步位置模式(CSP) |
0x8 |
精密点位控制、轨迹插补 |
| 周期同步速度模式(CSV) |
0x9 |
恒速运行、转速调节 |
| 周期同步转矩模式(CST) |
0xA |
恒力输出、力矩控制 |
3. 多电机协同示例:简化复杂系统开发
睿擎平台提供了可直接运行的多电机控制示例,演示了通过单个EtherCAT主站同时控制两个伺服电机的协同逻辑。该示例为开发者构建多轴系统提供了清晰的参考框架,通过修改和扩展,可以便捷地适配更多轴数的复杂应用。
三、技术实现:EtherCAT多轴控制核心流程
以下是在睿擎派开发板上实现EtherCAT多轴控制系统的主要流程。
1. 系统初始化与配置
初始化主站服务,配置网络接口并进行拓扑扫描,为通信建立基础。
// EtherCAT服务初始化
ecat_service_init();
// 配置网络接口(例如“e1”)
csp_master.nic0 = ifname ? ifname : “e1”;
// 初始化主站结构体
ecat_master_init(&csp_master);
// 自动扫描网络拓扑
ecat_config_init(&csp_master, RT_FALSE);
2. 分布式时钟(DC)同步配置
启用分布式时钟同步功能,为所有接入网络的设备提供统一、精确的时间基准,这是实现高精度多轴同步的核心。
// 配置分布式时钟同步
ecat_config_dc(&csp_master);
3. 状态机管理与切换
EtherCAT通信遵循严格的状态机(INIT → PRE-OP → SAFE-OP → OP)切换流程,确保系统启动过程可靠可控。
// 切换到 PRE-OP 状态
ecat_write_state(&csp_master, 0, EC_STATE_PREOP);
// 验证从站状态
state = EC_STATE_PRE_OP;
ecat_check_state(&csp_master, 0, &state, 2000000 * 3);
// 切换到 SAFE-OP 状态
ecat_write_state(&csp_master, 0, EC_STATE_SAFE_OP);
state = EC_STATE_SAFE_OP;
err = ecat_check_state(&csp_master, 0, &state, 20000000 * 3);
// 最终切换到 OPERATIONAL 状态
ecat_write_state(&csp_master, 0, EC_STATE_OPERATIONAL);
4. 实时控制循环
进入运行状态后,系统进入周期性的实时控制循环,执行数据交换与运动控制算法。
// 启动高精度硬件定时器
ecat_hwtimer_start(&csp_master);
while(1) {
// 更新伺服驱动器状态机
sv_update_state(&csp_master);
// 发送过程数据(PDO)并接收从站反馈
ecat_send_processdata_group(&csp_master, 0);
ecat_receive_processdata_group(&csp_master, 0, 2000*10);
// 根据模式(如CSP)计算并更新目标指令
if(motor_run_flag) {
if(motor_dir == 0) {
target_pos += 1000; // 正向运动
} else {
target_pos -= 1000; // 反向运动
}
}
// 等待并同步至下一个精确控制周期
ecat_sync_dc(&csp_master);
}
这种基于Linux实时系统的循环设计,确保了控制指令的严格周期性发布。
四、开发实战:在睿擎派上构建EtherCAT控制系统
1. 硬件准备
- 睿擎派RC3506工业开发板
- EtherCAT伺服驱动器(如汇川SV660N)
- 伺服电机
- 标准网线及电源线
2. 连接与拓扑
将伺服驱动器的IN端口与开发板的ETH1网口连接。若需控制多个电机,可将后续驱动器的IN口与前一驱动器的OUT口以菊花链形式串联。
3. 软件开发流程
在RuiChing Studio IDE中:
- 创建对应的EtherCAT示例工程(例如
06_bus_ethercat_master_csp)。
- 根据实际硬件修改网络接口名、从站PDO映射等参数。
- 编译工程并下载程序至开发板。
- 通过终端命令行调试与控制。
4. 常用调试命令
睿擎派提供了简洁的Shell命令用于调试:
# 启动EtherCAT主站服务(以CSP模式示例为例)
msh > ect_csp
# 启动电机运行
msh > motor_run
# 停止电机
msh > motor_stop
# 设置运动方向 (0 或 1)
msh > motor_dir 0
五、典型工业应用场景
睿擎的EtherCAT多轴解决方案已应用于多种对精度和实时性要求严苛的场景:
- 自动化产线:实现多个执行单元(如机械臂、传送带)的毫秒级协同,提升装配与搬运效率。
- 工业机器人:为多关节机器人提供低抖动、高同步性的关节控制,保障运动轨迹精度。
- 精密加工设备:在CNC、激光切割等设备中,确保多轴联动的微米级精度,直接提升加工质量。
六、总结
睿擎工业开发平台通过其深度优化的EtherCAT协议栈,结合DC自动补偿、多控制模式与完备的示例,为工业运动控制领域提供了一套高可靠、高精度的解决方案。其实现的±5µs同步抖动控制能力,尤其适用于要求严苛的多轴协同应用。
随着智能制造的演进,对实时通信网络和精确控制的要求将持续提高。睿擎平台将持续迭代其EtherCAT及相关工控技术,为开发者与设备制造商提供更强大的底层支撑,推动工业自动化向更高水平发展。
 发表于 2025-12-11 02:00:03
|
查看: 184|
回复: 0
发表于 2025-12-11 02:00:03
|
查看: 184|
回复: 0
