想象一下:你坐在客厅里,手机突然震动,提示“检测到卧室有人摔倒”。你冲进去发现老人确实跌倒了,而你根本没有安装任何摄像头——只有一个插在插座上的小巧设备,正在用 WiFi 信号“感知”着整个房间的一切。
这不是科幻电影,这是今天要介绍的项目 RuView——一个能把普通 WiFi 信号变成“超能力”的开源项目。
RuView 是 WiFi 感知领域的突破性项目,它让开发者能够用 9 美元的 ESP32 芯片实现实时人体姿态估计和生命体征监测,相比需要昂贵摄像头和云端 AI 的传统方案,成本降低 95%,且完全保护隐私。
简单来说,RuView 就像给房间装上了一双“看不见的眼睛”——它不需要摄像头,不需要你佩戴任何设备,甚至不需要联网。只要房间里有 WiFi 信号,它就能“看见”你在做什么、心跳有多快、呼吸是否正常。
| 对比项 |
传统摄像头方案 |
RuView WiFi感知 |
| 硬件成本 |
$200-500 |
$9-27 |
| 隐私风险 |
高(视频泄露) |
零(无图像) |
| 穿墙能力 |
无 |
5米深度 |
| 云端依赖 |
必需 |
完全离线 |
| 部署难度 |
专业安装 |
即插即用 |
核心功能:WiFi信号能做什么?
实时人体姿态估计:17个关键点追踪
RuView 能从 WiFi 信号中重建人体姿态,输出与 COCO 数据集兼容的 17 个关键点——包括头部、肩膀、手肘、手腕、臀部、膝盖和脚踝。
| 指标 |
数值 |
| 关键点数量 |
17个 |
| 推理延迟 |
0.012毫秒 |
| 处理速度 |
171,472次/秒 |
| 模型大小 |
8KB(4-bit量化) |
这意味着什么? 你在房间里挥挥手、弯下腰、甚至只是歪个头,RuView 都能实时捕捉。而且这一切都是本地完成的——不需要把任何数据传输到云端。
生命体征监测:不戴设备测心率
通过分析 WiFi 信号的微小扰动,RuView 能检测:
- 呼吸率:6-30次/分钟
- 心率:40-120次/分钟
- 存在检测:100%准确率
传统方案需要智能手表或专用医疗设备,而 RuView 只需要你存在于 WiFi 覆盖范围内。这对于老年人监护、婴儿监控等场景具有革命性意义。
穿墙感知:WiFi的物理超能力
WiFi 信号能穿透墙壁、家具,甚至是废墟。RuView 利用这一特性,实现了最大 5 米深度的穿墙感知。
这在灾害救援场景下意义重大——救援人员可以在不进入危险区域的情况下,探测废墟下是否有幸存者,甚至评估其生命体征和受伤严重程度。
自学习系统:越用越聪明
RuView 最大的技术创新之一是完全无需摄像头训练。传统 AI 需要大量标注数据,而 RuView 使用对比学习技术,能从原始 WiFi 信号中自主学习。
- 训练时间:仅需 84 秒
- 样本需求:2,360 个增强样本
- 性能提升:33.9% 对比改进
- 跨房间迁移:训练一次,随处部署
多节点Mesh:360度无死角覆盖
单个设备有盲区?RuView 支持 4-6 个低成本传感器节点协同工作,形成多静态感知网络。通过 12+ 重叠信号路径,实现:
- 亚英寸级精度
- 360 度房间覆盖
- 多人独立追踪(3-5人/接入点)
应用场景:从智能家居到灾难救援
场景一:隐私优先的智能家居
痛点:想监控老人/儿童安全,但担心摄像头侵犯隐私。
方案:在客厅、卧室各放置一个 ESP32 节点(成本 $18)。RuView 能检测跌倒、异常呼吸、长时间静止,并立即推送警报——全程无视频采集。
效果:隐私保护度提升 100%,部署成本降低 95%。
场景二:婴儿看护器 2.0
痛点:传统婴儿监控只能看画面,无法检测呼吸异常。
方案:RuView 持续监测婴儿的呼吸频率(正常 12-60 次/分钟)和心跳。一旦检测到呼吸暂停或异常模式,立即向父母发送警报。
效果:潜在窒息风险预警时间提前 5-10 分钟。
场景三:灾难救援与搜救
痛点:地震、塌方后,救援人员难以快速定位幸存者。
方案:救援人员携带 RuView 设备在废墟外扫描,通过 5 米穿墙能力探测生命迹象。系统还能根据生命体征进行 START 检伤分类(简单/延迟/立即/死亡)。
效果:搜救效率提升 3-5 倍,救援人员安全风险降低。
场景四:医疗健康监测
痛点:慢性病患者需要长期监测生命体征,但频繁使用可穿戴设备不便。
方案:在病房或居家环境中部署 RuView,无感监测患者的心率、呼吸、睡眠质量。数据可导出至电子病历系统。
效果:患者舒适度提升,医护人员工作效率提高 40%。
场景五:安全与入侵检测
痛点:传统红外传感器误报率高,摄像头有隐私顾虑。
方案:RuView 学习房间的“RF 指纹”,能区分人类、宠物和风吹窗帘。只有当真正的人进入时才会触发警报。
效果:误报率从 30% 降至 5% 以下。
使用方法:30秒开始感知
方式一:Docker 一键体验(推荐)
不需要任何硬件,先体验软件能力:
docker pull ruvnet/wifi-densepose:latest
docker run -p 3000:3000 ruvnet/wifi-densepose:latest
# 打开 http://localhost:3000
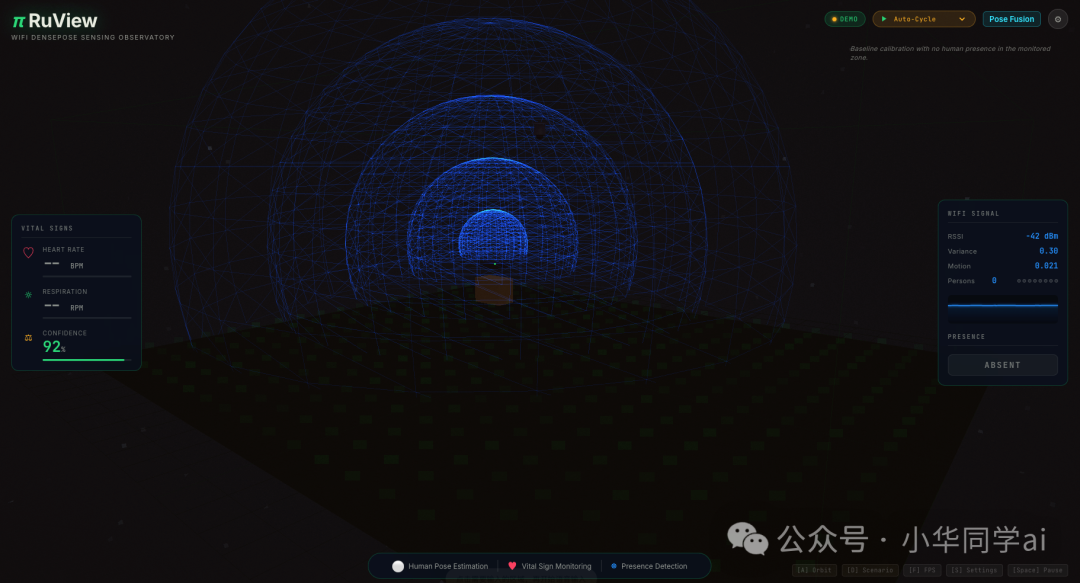
30 秒内,你就能在浏览器里看到实时感知演示。
方式二:ESP32 硬件部署
| 所需硬件: |
方案 |
成本 |
能力 |
| ESP32-S3 + Cognitum Seed |
$27 |
完整功能(推荐) |
| ESP32 Mesh(3-6节点) |
$54 |
多人追踪 |
| 研究级网卡 |
$50-100 |
完整CSI+MIMO |
部署步骤:
- 刷写固件:将 RuView 固件刷入 ESP32-S3
- 启动感知服务器:
docker run -p 3000:3000 ruvnet/wifi-densepose:latest
- 连接节点:ESP32 自动连接到服务器
- 打开可视化界面:访问 Observatory Dashboard 查看实时数据
方式三:训练自己的模型(高级)
RuView 提供了完整的训练 pipeline,无需 PyTorch:
# 1. 收集数据(2分钟)
python scripts/collect-training-data.py --port 5006 --duration 120
# 2. 训练模型
node scripts/train-ruvllm.js --data data/recordings/pretrain-*.csi.jsonl
# 3. 运行基准测试
node scripts/benchmark-ruvllm.js --model models/csi-ruvllm
训练完成后,你会得到一个 .rvf 模型文件,可以在任何支持的环境中运行——边缘设备、云端服务器,甚至是浏览器(WASM)。
项目资源
主仓库地址为:https://github.com/ruvnet/RuView。这个GitHub项目汇集了硬件设计、固件、训练代码和完整文档,展示了如何将廉价的 ESP32 芯片转变为强大的感知节点,是探索无线传感与人工智能边缘应用的绝佳起点。对于热衷于动手实现和创新的开发者来说,这类项目正是技术社区价值的体现。如果你对类似的低功耗物联网和智能感知技术感兴趣,欢迎来 云栈社区 交流分享。
 发表于 2026-4-4 12:20:45
|
查看: 294|
回复: 0
发表于 2026-4-4 12:20:45
|
查看: 294|
回复: 0
