本文将详细介绍如何使用预训练的深度学习模型实现汽车图像分割,从理论原理到代码实现进行全面讲解。
一、什么是图像分割?
1.1 图像分割的定义
图像分割(Image Segmentation)是计算机视觉中的核心任务之一,目标是将图像中的每个像素分配到特定的类别。
┌─────────────────────────────────────────────────────────────┐
│ 图像分类 目标检测 语义分割 │
│ ───────── ───────── ───────── │
│ [图片] [图片+框] [图片+像素着色] │
│ ↓ ↓ ↓ │
│ “这是一辆车” “车在这个位置” “每个像素属于什么” │
└─────────────────────────────────────────────────────────────┘
1.2 分割类型对比
| 类型 |
描述 |
输出 |
| 语义分割 |
每个像素分类,不区分实例 |
像素级类别图 |
| 实例分割 |
区分同类的不同实例 |
实例+类别 |
| 全景分割 |
语义+实例的结合 |
完整场景理解 |
本文采用的是语义分割方法。
二、DeepLabV3 模型架构
2.1 为什么选择 DeepLabV3?
DeepLabV3 是 Google 提出的语义分割模型,具有以下优势:
- ✅ PyTorch 内置:torchvision 直接提供预训练权重
- ✅ 高精度:在 COCO 数据集上表现优异
- ✅ 支持多类别:包括汽车、行人、动物等 21 个类别
- ✅ 端到端推理:输入图像直接输出分割图
2.2 核心技术:空洞卷积(Atrous Convolution)
DeepLabV3 的核心创新是空洞卷积(也称膨胀卷积):
普通卷积 (dilation=1) 空洞卷积 (dilation=2)
┌───┬───┬───┐ ┌───┬ ┬───┬ ┬───┐
│ × │ × │ × │ │ × │ │ × │ │ × │
├───┼───┼───┤ ├───┤ ├───┤ ├───┤
│ × │ × │ × │ │ │ │ │ │ │
├───┼───┼───┤ ├───┤ ├───┤ ├───┤
│ × │ × │ × │ │ × │ │ × │ │ × │
└───┴───┴───┘ └───┴ ┴───┴ ┴───┘
感受野: 3×3 感受野: 5×5
优势:
- 在不增加参数量的情况下扩大感受野
- 捕获多尺度上下文信息
- 保持空间分辨率
2.3 ASPP 模块(Atrous Spatial Pyramid Pooling)
DeepLabV3 使用 ASPP 模块并行处理多个尺度:
输入特征图
│
┌───┼───┐
│ │ │
▼ ▼ ▼
1×1卷积 3×3空洞 3×3空洞 → 不同 dilation rate
rate=1 rate=6 rate=12
│ │ │
└───┬───┴────┬────┘
│ │
▼ ▼
全局平均池化 + 1×1卷积
│
▼
拼接 + 1×1卷积
│
▼
输出特征图
三、实际分割效果展示
3.1 原始输入图像
下面是我们用于测试的汽车图像:
 图1:输入的高分辨率汽车照片(1024×1024)
图1:输入的高分辨率汽车照片(1024×1024)
3.2 分割掩码输出
模型推理后生成的二值分割掩码,粉色区域表示检测到的汽车:
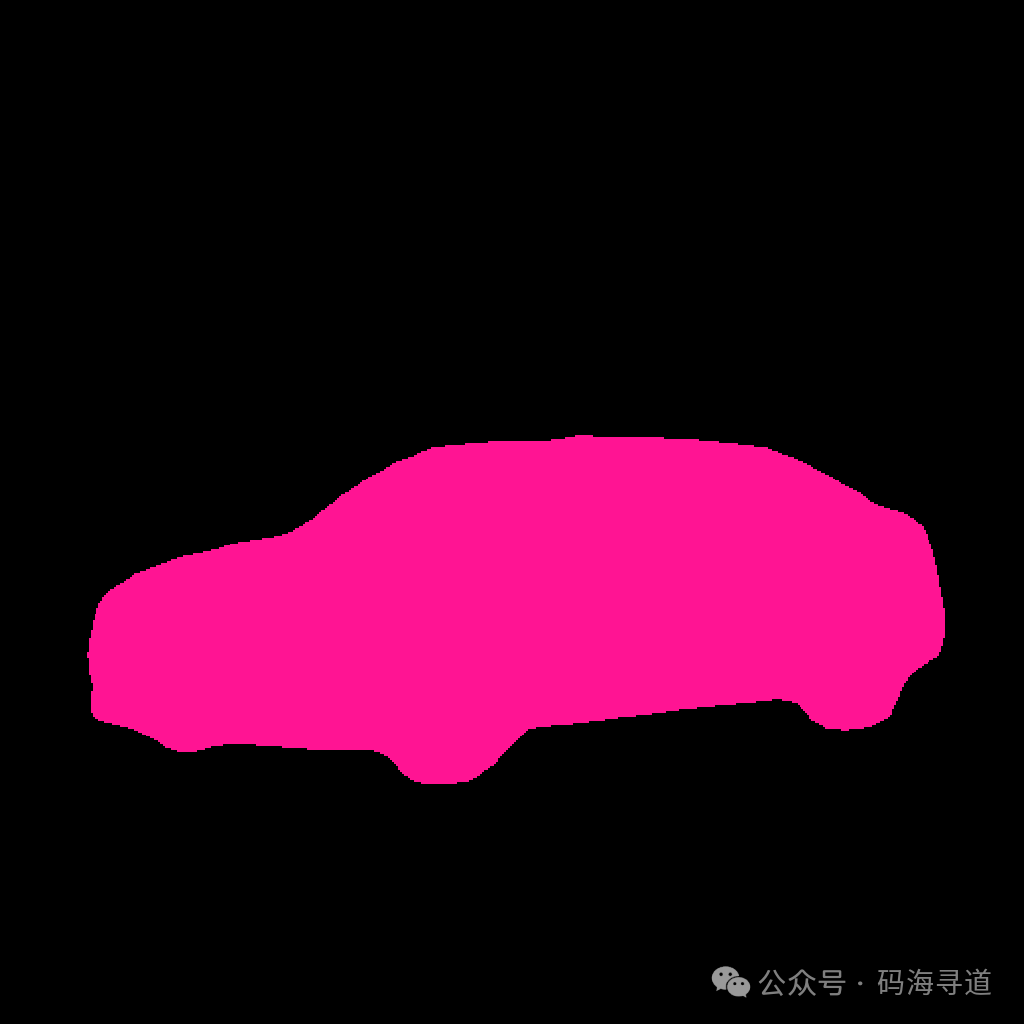 图2:DeepLabV3 生成的汽车分割掩码(检测到 19.93% 像素属于汽车)
图2:DeepLabV3 生成的汽车分割掩码(检测到 19.93% 像素属于汽车)
3.3 叠加可视化效果
将分割掩码以 50% 透明度叠加到原图上,直观展示分割效果:
 图3:原图与掩码的 Alpha 混合叠加可视化
图3:原图与掩码的 Alpha 混合叠加可视化
四、代码实现详解
4.1 模型加载
from torchvision.models.segmentation import deeplabv3_resnet101, DeepLabV3_ResNet101_Weights
def load_model():
"""加载预训练的 DeepLabV3 模型"""
# 使用默认的 COCO 数据集预训练权重
weights = DeepLabV3_ResNet101_Weights.DEFAULT
model = deeplabv3_resnet101(weights=weights)
model.eval() # 设置为评估模式,关闭 Dropout 和 BatchNorm 训练行为
return model, weights
| 关键点解析: |
参数 |
说明 |
DeepLabV3_ResNet101_Weights.DEFAULT |
使用最新的预训练权重 |
model.eval() |
推理模式:BN使用全局统计量,Dropout关闭 |
ResNet101 |
骨干网络,101层残差网络 |
4.2 图像预处理
def preprocess_image(image_path, weights):
"""加载并预处理图像"""
image = Image.open(image_path).convert(“RGB”)
original_size = image.size
# 获取模型权重定义的标准预处理流程
preprocess = weights.transforms()
input_tensor = preprocess(image)
input_batch = input_tensor.unsqueeze(0) # [C, H, W] → [1, C, H, W]
return input_batch, image, original_size
预处理流程:
原始图像
│
▼
① 调整尺寸 → 520×520(模型默认输入尺寸)
│
▼
② 转为 Tensor → [0, 255] → [0.0, 1.0]
│
▼
③ 标准化 → 减均值、除标准差(ImageNet统计量)
mean = [0.485, 0.456, 0.406]
std = [0.229, 0.224, 0.225]
│
▼
④ 添加 Batch 维度 → [1, 3, 520, 520]
4.3 模型推理
def run_inference(model, input_batch):
"""运行模型推理"""
with torch.no_grad(): # 禁用梯度计算
output = model(input_batch)[‘out’][0]
# 对每个像素取概率最大的类别
predictions = output.argmax(0).cpu().numpy()
return predictions
推理过程详解:
输入: [1, 3, 520, 520]
│
▼
┌─────────────┐
│ ResNet101 │ ← 骨干网络提取特征
│ Backbone │
└─────────────┘
│
▼
┌─────────────┐
│ ASPP │ ← 多尺度特征融合
│ Module │
└─────────────┘
│
▼
┌─────────────┐
│ Decoder │ ← 上采样恢复分辨率
└─────────────┘
│
▼
输出: [1, 21, 520, 520] ← 21个类别的概率图
│
▼
argmax(dim=1)
│
▼
预测: [520, 520] ← 每个像素的类别ID
4.4 掩码提取
CAR_CLASS_ID = 7 # COCO 数据集中汽车的类别ID
def create_car_mask(predictions, original_size):
"""从预测结果中提取汽车掩码"""
# 创建二值掩码:汽车像素=1,其他=0
car_mask = (predictions == CAR_CLASS_ID).astype(np.uint8)
# 调整回原始图像尺寸
mask_image = Image.fromarray(car_mask * 255)
mask_image = mask_image.resize(original_size, Image.NEAREST)
return mask_image
| COCO 类别对照表: |
ID |
类别 |
ID |
类别 |
ID |
类别 |
| 0 |
背景 |
7 |
汽车 |
14 |
摩托车 |
| 1 |
飞机 |
8 |
猫 |
15 |
人 |
| 2 |
自行车 |
9 |
椅子 |
16 |
盆栽 |
| 3 |
鸟 |
10 |
牛 |
17 |
羊 |
| 4 |
船 |
11 |
餐桌 |
18 |
沙发 |
| 5 |
瓶子 |
12 |
狗 |
19 |
火车 |
| 6 |
公交车 |
13 |
马 |
20 |
电视 |
4.5 可视化叠加
MASK_COLOR = (255, 20, 147) # 粉色
OVERLAY_ALPHA = 0.5 # 透明度
def create_overlay(original_image, mask_image):
"""创建原图与掩码的叠加可视化"""
original_array = np.array(original_image).astype(np.float32)
mask_array = np.array(mask_image)
overlay_array = original_array.copy()
mask_bool = mask_array > 0
# Alpha 混合公式:result = original * (1-α) + color * α
overlay_array[mask_bool] = (
original_array[mask_bool] * (1 - OVERLAY_ALPHA) +
np.array(MASK_COLOR) * OVERLAY_ALPHA
)
return Image.fromarray(overlay_array.astype(np.uint8))
Alpha 混合原理:
对于掩码区域的每个像素:
R_out = R_原图 × 0.5 + 255 × 0.5
G_out = G_原图 × 0.5 + 20 × 0.5
B_out = B_原图 × 0.5 + 147 × 0.5
效果:保留原图细节的同时叠加半透明粉色
五、完整处理流程
┌─────────────────────────────────────────────────────────────────┐
│ 汽车图像分割完整流程 │
└─────────────────────────────────────────────────────────────────┘
原始图像 输出结果
car_original.png
│
▼
┌──────────┐ ← PIL.Image.open()
│ 图像加载 │
└──────────┘
│
▼
┌──────────┐ ← 缩放、归一化、转Tensor
│ 预处理 │
└──────────┘
│
▼
┌──────────┐ ← deeplabv3_resnet101
│ 模型推理 │
└──────────┘
│
▼
┌──────────┐ ← predictions == 7 (汽车)
│ 类别提取 │
└──────────┘
│
┌───┴───┐
│ │
▼ ▼
┌──────┐ ┌──────┐
│ 掩码 │ │ 叠加 │
└──────┘ └──────┘
│ │
▼ ▼
car_mask car_overlay
_real.png _real.png
六、运行结果分析
6.1 控制台输出
==================================================
🚗 汽车图像分割 - DeepLabV3
==================================================
📦 正在加载预训练 DeepLabV3-ResNet101 模型...
✅ 模型加载成功!
📷 正在加载图像: car_original.png
图像尺寸: 1024x1024
🔄 正在进行分割推理...
输出尺寸: (520, 520)
🎭 正在提取汽车掩码 (类别ID: 7)...
检测到汽车像素: 53887 (19.93%)
✨ 正在创建叠加可视化...
💾 正在保存结果...
✅ 掩码已保存: car_mask_real.png
✅ 叠加图已保存: car_overlay_real.png
🎉 分割完成!
6.2 分割统计
| 指标 |
数值 |
| 输入尺寸 |
1024×1024 |
| 模型输出尺寸 |
520×520 |
| 汽车像素数 |
53,887 |
| 汽车像素占比 |
19.93% |
| 处理时间 |
~2-3秒 |
6.3 结果解读
| 输出文件 |
描述 |
用途 |
car_original.png |
原始输入图像 |
对照参考 |
car_mask_real.png |
二值分割掩码 |
后续处理(抠图、替换背景) |
car_overlay_real.png |
半透明叠加 |
可视化验证效果 |
七、与 UNet 的对比
| 特性 |
UNet |
DeepLabV3 |
| 架构 |
编码器-解码器 + 跳跃连接 |
骨干网络 + ASPP + 解码器 |
| 核心技术 |
跳跃连接保留细节 |
空洞卷积扩大感受野 |
| 适用场景 |
医学图像、小数据集 |
自然图像、大规模数据 |
| 预训练 |
较少公开权重 |
torchvision 内置 |
| 输入尺寸 |
灵活 |
通常需要固定尺寸 |
两者都是强大的分割架构,选择取决于具体任务和数据。
八、扩展应用
8.1 背景替换
# 使用掩码提取前景
foreground = original_image * mask
# 合成到新背景
result = foreground + new_background * (1 - mask)
8.2 颜色修改
# 只在汽车区域应用颜色变换
car_region = original_image[mask > 0]
car_region = apply_color_transform(car_region)
8.3 批量处理
for image_path in image_list:
result = segment_car(image_path)
save_result(result)
九、总结
本文介绍了如何使用 PyTorch 的 DeepLabV3 预训练模型实现汽车图像分割:
- 模型加载:使用 torchvision 加载预训练权重
- 图像预处理:标准化、调整尺寸、转换格式
- 模型推理:前向传播获取21类别概率图
- 掩码提取:根据类别ID提取目标区域
- 可视化:Alpha混合生成叠加效果
这套方法可以快速应用到各种图像分割任务中,如人像分割、物体抠图等。
十、完整源代码
以下是 segment_car.py 的完整代码:
“”“
汽车图像分割 - 使用预训练 DeepLabV3 模型
==========================================
本脚本使用 PyTorch 预训练的 DeepLabV3-ResNet101 模型对汽车图像进行语义分割。
该模型在 COCO 数据集上训练,包含 ‘car’ 作为 21 个类别之一。
COCO 数据集类别对照表:
0: 背景, 1: 飞机, 2: 自行车, 3: 鸟, 4: 船,
5: 瓶子, 6: 公交车, 7: 汽车, 8: 猫, 9: 椅子, 10: 牛,
11: 餐桌, 12: 狗, 13: 马, 14: 摩托车, 15: 人,
16: 盆栽, 17: 羊, 18: 沙发, 19: 火车, 20: 电视
”“”
import torch
import torchvision.transforms as T
from torchvision.models.segmentation import deeplabv3_resnet101, DeepLabV3_ResNet101_Weights
from PIL import Image
import numpy as np
import os
# 配置参数
INPUT_IMAGE = “car_original.png” # 输入的汽车图像
OUTPUT_MASK = “car_mask_real.png” # 输出的二值掩码
OUTPUT_OVERLAY = “car_overlay_real.png” # 叠加可视化结果
CAR_CLASS_ID = 7 # COCO 数据集中 ‘汽车’ 的类别ID
MASK_COLOR = (255, 20, 147) # 掩码颜色 (粉色 RGB)
OVERLAY_ALPHA = 0.5 # 叠加透明度
def load_model():
“”“加载预训练的 DeepLabV3 模型”“”
print(“📦 正在加载预训练 DeepLabV3-ResNet101 模型...”)
weights = DeepLabV3_ResNet101_Weights.DEFAULT
model = deeplabv3_resnet101(weights=weights)
model.eval() # 设置为评估模式
print(“✅ 模型加载成功!”)
return model, weights
def preprocess_image(image_path, weights):
“”“加载并预处理图像”“”
print(f“📷 正在加载图像: {image_path}”)
image = Image.open(image_path).convert(“RGB”)
original_size = image.size # (宽度, 高度)
# 使用模型权重中定义的预处理方式
preprocess = weights.transforms()
input_tensor = preprocess(image)
input_batch = input_tensor.unsqueeze(0) # 添加 batch 维度
print(f“ 图像尺寸: {original_size[0]}x{original_size[1]}”)
return input_batch, image, original_size
def run_inference(model, input_batch):
“”“运行模型推理”“”
print(“🔄 正在进行分割推理...”)
with torch.no_grad(): # 禁用梯度计算以节省内存
output = model(input_batch)[‘out’][0]
# 获取每个像素的类别预测
predictions = output.argmax(0).cpu().numpy()
print(f“ 输出尺寸: {predictions.shape}”)
return predictions
def create_car_mask(predictions, original_size):
“”“从预测结果中提取汽车类别,创建二值掩码”“”
print(f“🎭 正在提取汽车掩码 (类别ID: {CAR_CLASS_ID})...”)
# 创建汽车类别的二值掩码
car_mask = (predictions == CAR_CLASS_ID).astype(np.uint8)
# 统计汽车像素数量
car_pixels = np.sum(car_mask)
total_pixels = car_mask.size
car_percentage = (car_pixels / total_pixels) * 100
print(f“ 检测到汽车像素: {car_pixels} ({car_percentage:.2f}%)”)
# 如果没有检测到汽车,尝试其他车辆类别
if car_pixels == 0:
print(“⚠️ 未检测到汽车! 尝试其他车辆类别...”)
for alt_class, name in [(6, ‘公交车’), (14, ‘摩托车’)]:
alt_mask = (predictions == alt_class).astype(np.uint8)
if np.sum(alt_mask) > 0:
print(f“ 检测到 {name}!”)
car_mask = alt_mask
break
# 转换为 PIL 图像并调整到原始尺寸
mask_image = Image.fromarray(car_mask * 255)
mask_image = mask_image.resize(original_size, Image.NEAREST)
return mask_image, car_mask
def create_colored_mask(mask_image):
“”“创建彩色版本的掩码”“”
mask_array = np.array(mask_image)
# 创建 RGB 彩色掩码
colored_mask = np.zeros((*mask_array.shape, 3), dtype=np.uint8)
colored_mask[mask_array > 0] = MASK_COLOR
return Image.fromarray(colored_mask)
def create_overlay(original_image, mask_image):
“”“创建原图与掩码的叠加可视化”“”
print(“✨ 正在创建叠加可视化...”)
# 转换为 numpy 数组
original_array = np.array(original_image).astype(np.float32)
mask_array = np.array(mask_image)
# 复制原图
overlay_array = original_array.copy()
# 在掩码区域应用彩色叠加
mask_bool = mask_array > 0
overlay_array[mask_bool] = (
original_array[mask_bool] * (1 - OVERLAY_ALPHA) +
np.array(MASK_COLOR) * OVERLAY_ALPHA
)
return Image.fromarray(overlay_array.astype(np.uint8))
def save_results(original, mask, overlay):
“”“保存所有输出图像”“”
print(“\n💾 正在保存结果...”)
# 保存彩色掩码
colored_mask = create_colored_mask(mask)
colored_mask.save(OUTPUT_MASK)
print(f“ ✅ 掩码已保存: {OUTPUT_MASK}”)
# 保存叠加图
overlay.save(OUTPUT_OVERLAY)
print(f“ ✅ 叠加图已保存: {OUTPUT_OVERLAY}”)
print(“\n🎉 分割完成!”)
def main():
“”“主分割流程”“”
print(“=” * 50)
print(“🚗 汽车图像分割 - DeepLabV3”)
print(“=” * 50 + “\n”)
# 检查输入图像是否存在
if not os.path.exists(INPUT_IMAGE):
print(f“❌ 错误: 输入图像 ‘{INPUT_IMAGE}’ 不存在!”)
print(“ 请确保图像文件位于当前目录中。”)
return
# 加载模型
model, weights = load_model()
# 预处理图像
input_batch, original_image, original_size = preprocess_image(INPUT_IMAGE, weights)
# 运行推理
predictions = run_inference(model, input_batch)
# 创建汽车掩码
mask_image, _ = create_car_mask(predictions, original_size)
# 创建叠加可视化
overlay_image = create_overlay(original_image, mask_image)
# 保存结果
save_results(original_image, mask_image, overlay_image)
print(“\n📁 输出文件:”)
print(f“ - 原图: {INPUT_IMAGE}”)
print(f“ - 掩码: {OUTPUT_MASK}”)
print(f“ - 叠加: {OUTPUT_OVERLAY}”)
if __name__ == “__main__”:
main()
运行方式
# 确保已安装依赖
pip install torch torchvision pillow numpy
# 运行脚本
python segment_car.py
 发表于 2025-12-12 19:13:01
|
查看: 198|
回复: 0
发表于 2025-12-12 19:13:01
|
查看: 198|
回复: 0
