在汇川PLC的运动控制编程中,MC_POWER 指令是伺服轴控制的基础与核心,主要用于轴的使能与禁用。该指令同时适用于 EtherCAT 总线轴和本地脉冲轴,通过设定使能状态(高电平有效)来控制电机的工作模式。
指令格式解析
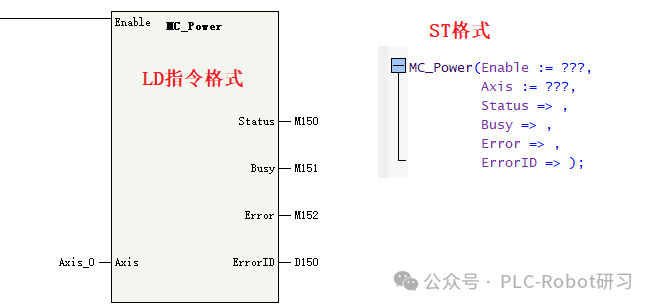
无论是使用梯形图(LD)还是结构化文本(ST)编程,指令的调用格式保持一致。
核心功能与接口详解
MC_POWER 指令主要实现三大功能:
- 使能轴:向驱动器发送使能信号,激活电机,使其准备接收后续的运动指令(如定位、速度控制)。
- 禁用轴:撤销使能信号,电机进入自由状态(通常可手动转动)。
- 监控轴状态:实时反馈轴的使能状态、准备就绪信号及故障信息。
各接口参数含义如下:
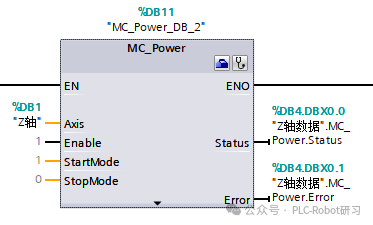
- Axis:轴变量。用于指定控制的轴编号,必须与项目“运动控制轴配置”中定义的轴变量完全一致。
- Enable:使能触发信号。上升沿有效,当该信号为ON时,指令持续执行使能操作;为OFF时,电机进入自由状态。在实际应用中,通常需要保持该信号为ON以维持轴的使能。
- Status:状态输出。当轴成功使能且驱动器准备就绪时,该信号为ON;轴禁用时,同步为OFF。
- Busy:繁忙标志位。指令正在执行时为ON,执行完毕或停止后为OFF。
- Error:错误标志位。当指令执行出错时为ON,具体的错误代码可在
ErrorID变量中查看。
指令执行逻辑与时序
理解指令的内部执行流程和信号时序对于网络通信与系统底层交互的调试至关重要。
执行流程:
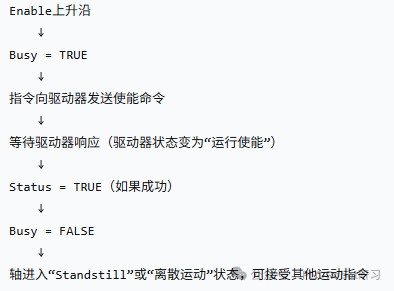
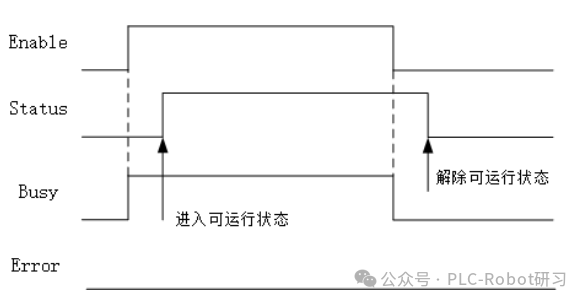
执行时序图:
基础编程示例
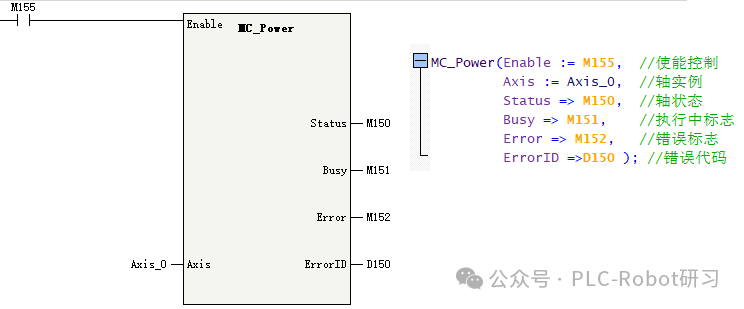
在梯形图(LD)和结构化文本(ST)中实现基本的使能控制。
使用前关键检查项
在调用MC_POWER指令前,务必确保以下条件已满足,这与保证系统稳定性和通信可靠性密切相关:
- 硬件连接正确:驱动器电源、编码器反馈线、通讯线(如EtherCAT网线)均需可靠连接。
- 驱动器状态正常:驱动器本身不应存在任何报警代码。
- 轴参数已完成配置:在软件中已完成对应轴的参数设置,包括单位、软限位、最大速度/加速度等。
- 系统无急停触发:确保急停回路未被按下或触发。
与西门子PLC MC_Power指令对比
在工业自动化领域,不同品牌的PLC指令设计理念各有特点。汇川的MC_POWER与西门子S7-1200/1500系列中的MC_Power指令功能类似,均用于轴的使能控制,但在接口细节上存在差异。
西门子MC_Power指令格式:
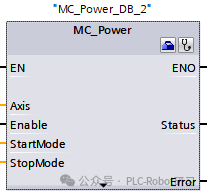
从引脚看,基础接口(Axis, Enable, Status)相似,使用前同样要求工艺对象(对应轴配置)已正确组态且无待决错误。
主要区别在于,西门子指令提供了更丰富的模式选择接口:
- StartMode:定义启动模式(0=位置不受控,1=位置受控),对于脉冲驱动器此参数常被忽略。
- StopMode:定义停止模式(0=紧急停止,1=立即停止,2=带加速度变化率控制的紧急停止),这使得禁用轴时的行为可控性更强。
总结:
无论是汇川PLC还是西门子PLC,MC_POWER/MC_Power指令都是伺服运动控制程序中最基础且必不可少的一环。两者的核心目的都是安全、可靠地控制伺服轴的使能状态。汇川作为国内工业自动化的领先品牌,其指令集设计简洁直观,在满足复杂网络与系统控制需求的同时,降低了工程师的编程门槛,在实际项目中表现稳定可靠。 |  发表于 2025-12-12 22:15:55
|
查看: 749|
回复: 0
发表于 2025-12-12 22:15:55
|
查看: 749|
回复: 0
