在进行机器人仿真时,经常需要根据实际硬件更换机器人的三维模型与描述文件。本文将详细介绍在基于Gazebo和MoveIt2的仿真环境中,如何替换不同机器人的STL模型文件与URDF描述文件。
一、准备模型文件(STL)
首先,需要准备好新机器人的三维模型文件。通常,这些文件为STL格式,并按机器人关节(links)分开存储。
操作步骤:
- 在您的ROS2功能包(例如
rm_description)中,找到存放网格模型的 meshes 目录。
- 在该目录下,为新的机器人模型创建一个单独的文件夹(例如
rm_65_arm),以便与旧模型(如 rm_63_arm)区分管理。
- 将新机器人的所有STL文件(如
base_link.STL, link1.STL 等)放入新建的文件夹中。
关键提示:
- 注意路径与命名:确保后续在URDF文件中引用的路径和文件名与此处完全一致,包括大小写。
- 组织结构:清晰的目录结构有利于管理多个机器人模型。下图为一种参考的文件组织结构。
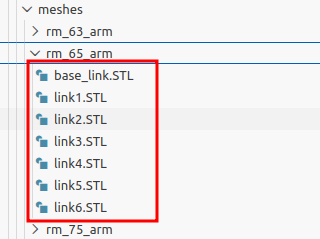 meshes目录下的模型文件结构示例。
meshes目录下的模型文件结构示例。
二、修改URDF描述文件
机器人模型的视觉、碰撞属性以及关节关系都在URDF(Unified Robot Description Format)文件中定义。我们需要修改此文件以指向新的STL模型。
操作步骤:
- 找到功能包中的URDF文件(通常位于
urdf 或 robots 目录下)。
- 在文本编辑器中打开URDF文件,定位到各个
<link> 的 <visual> 和 <collision> 标签下的 <mesh> 元素。
- 将
filename 属性中的路径,修改为指向您刚刚放置的新STL文件。
例如,原引用可能为:
<mesh filename="package://rm_description/meshes/rm_63_arm/link1.STL"/>
需将其更新为:
<mesh filename="package://rm_description/meshes/rm_65_arm/link1.STL"/>
- 除了模型路径,还需根据新机器人的实际参数,检查并更新关节限位(
<limit>)、坐标系变换(<origin>)等参数。
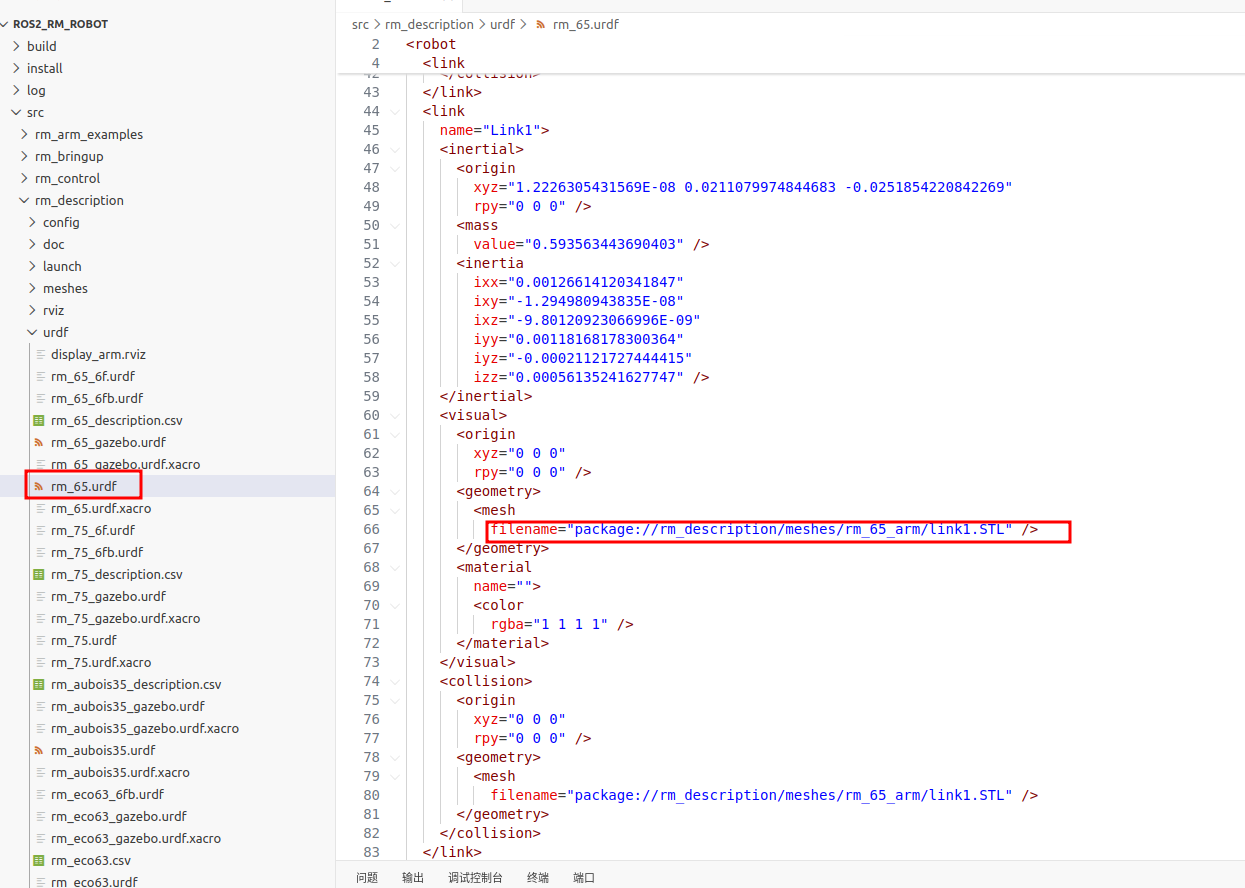 URDF文件中引用STL模型文件的代码片段,需修改
URDF文件中引用STL模型文件的代码片段,需修改filename路径。
三、进阶优化:使用Xacro宏
如果您的URDF文件较为复杂,或者希望在描述文件中加入变量、计算和条件判断等逻辑,强烈建议将 .urdf 文件转换为 .urdf.xacro 文件。
Xacro的优势:
- 可复用性:可以定义宏(
<xacro:macro>)来避免重复代码,例如定义通用的连杆或关节属性。
- 参数化:可以使用变量和算术运算,方便进行参数调整和配置管理。
- 模块化:可以通过
<xacro:include> 包含其他xacro文件,使模型描述更加清晰。
操作步骤:
- 将原
robot.urdf 文件重命名为 robot.urdf.xacro。
- 在文件顶部添加xacro的命名空间声明:
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="your_robot">。
- 随后,您就可以在文件中使用
<xacro:property> 定义属性,用 <xacro:macro> 定义宏,从而极大地提升URDF文件的维护性和可读性。对于复杂的机器人建模,这种模块化思想与Python等编程语言中的函数和类设计有异曲同工之妙。
完成上述步骤后,您就成功替换了仿真环境中的机器人模型。这为后续在Gazebo中进行物理仿真,以及在MoveIt2中规划和验证运动轨迹打下了基础。掌握模型替换是深入人工智能与机器人仿真领域的关键一步。 |  发表于 2025-12-14 09:31:07
|
查看: 230|
回复: 0
发表于 2025-12-14 09:31:07
|
查看: 230|
回复: 0
