在激光雷达技术快速迭代的浪潮中,全固态方案已成为重要的演进方向。业界常聚焦其“体积小、成本低、易量产”等结论,却少有关注其技术内核、与机械/半固态雷达的本质区别、当前进展与瓶颈。本文旨在系统拆解全固态激光雷达的工作原理、技术路径与行业现状。

激光雷达基础原理
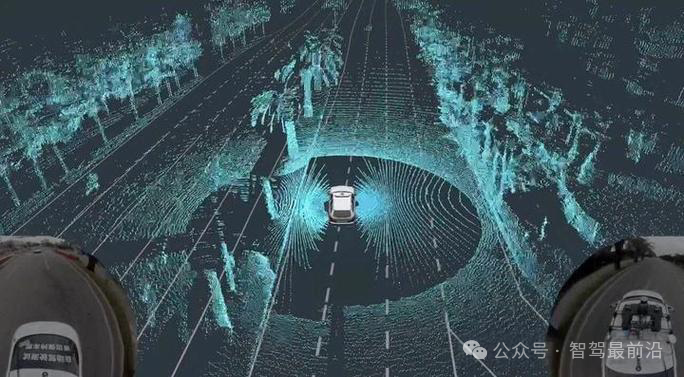
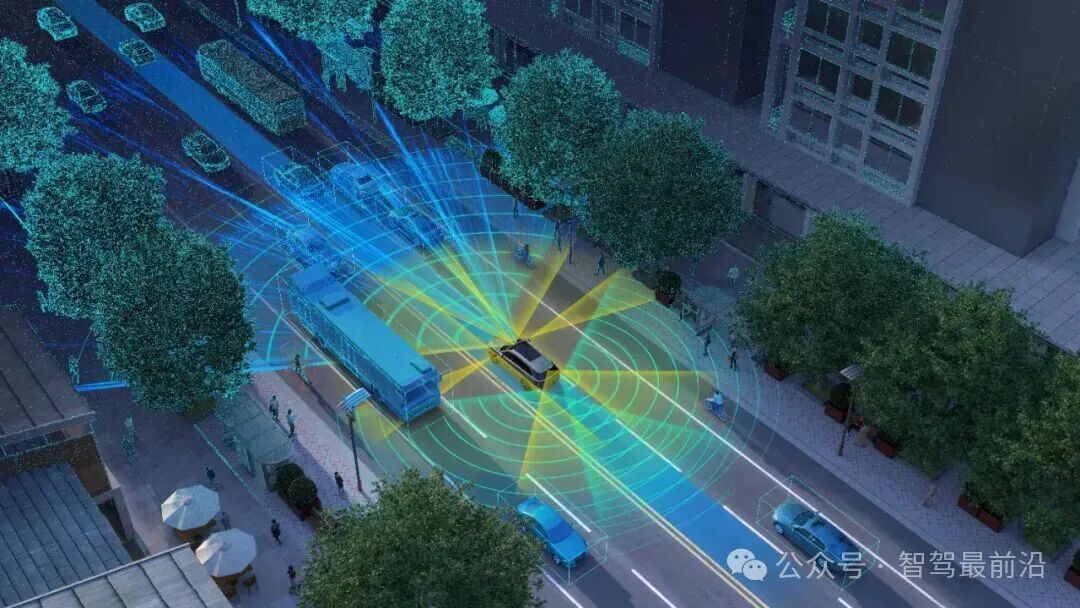
激光雷达(LiDAR,光探测与测距)的核心是飞行时间法(ToF):发射激光束,通过测量光束往返时间并乘以光速,计算出目标距离。通过高速发射脉冲并整合角度信息,即可构建描述环境三维形状的点云图。
与摄像头(富纹理但弱于测距)和毫米波雷达(强于测距测速但分辨率低)相比,激光雷达在三维空间感知上优势显著,因而成为自动驾驶、机器人自主导航及高精度测绘等领域的关键传感器。
早期机械旋转式激光雷达通过电机驱动实现360°扫描,虽能获取密集点云,但存在体积大、成本高、机械部件易磨损等问题,难以满足车规级量产需求。由此催生了结构更简化的半固态激光雷达,其核心收发模块固定,仅通过微动镜片等有限机械运动实现扫描。
全固态激光雷达的定义与优势
全固态激光雷达彻底消除了任何机械运动部件,光束的发射、扫描及接收完全依赖电子调控或静态光学结构实现。这种设计带来了多重优势:
- 高可靠性:无活动部件,抗震性强,寿命显著延长。
- 易于量产:结构简化,更符合汽车行业的大规模装配需求。
- 扫描速度快:电子控制可实现微秒级响应,远超机械极限。
- 小型化与低成本:去除了昂贵复杂的机械总成,体积和成本得以压缩。
全固态方案的核心在于通过纯电控或光控实现光束导向,从而在严苛环境下保持稳定性能。

主流技术路径:OPA 与 Flash LiDAR
目前,实现全固态扫描主要有两种技术路线,其原理和适用场景各有侧重。
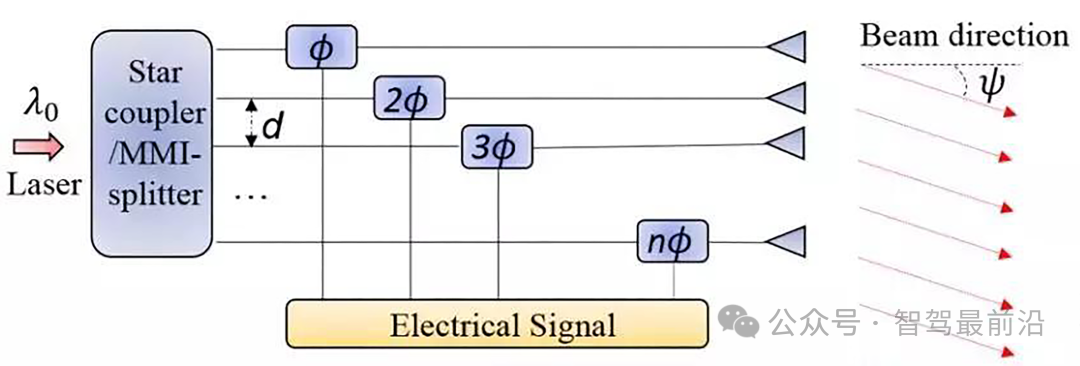
1. 光学相控阵(OPA)
OPA 由多个相干激光发射单元组成阵列,通过精确控制每个单元发射光波的相位差,使多路光波干涉叠加形成指向性极强的光束。改变控制信号即可实现光束偏转,完成电子扫描,过程无需任何机械运动。
优势:扫描速度极快、控制精度高、理论寿命长、潜在分辨率高。
挑战:
- 工艺门槛高:单元尺寸需控制在光波长量级(约1微米),对半导体制造工艺要求苛刻。
- 旁瓣干扰:在大视场角扫描时,能量易泄露至非主方向,影响信噪比与点云质量。
- 成本与集成度:目前仍处于工程化攻关阶段,大规模量产面临挑战。
2. Flash LiDAR
Flash LiDAR 采用“闪光”式工作原理:在极短瞬间向整个视场发射大面积激光脉冲,随后由二维面阵探测器(如SPAD或CMOS阵列)同步接收各方向的回波信号。每个探测像素独立计算飞行时间,从而一次性获取整个场景的深度图像,彻底无需扫描机制。
优势:结构极度简单、无扫描运动部件、帧率高、延迟极低,非常适合短距、高动态场景。
挑战:
- 能量分散:激光能量平均覆盖整个视场,导致单点能量密度低,限制了探测距离与分辨率。
- 环境干扰:易受背景光及多路径反射影响,对接收端灵敏度与抗干扰算法要求高。
为应对能量分散问题,业界多采用高灵敏度SPAD(单光子雪崩二极管)阵列或优化CMOS传感器结合深度计算算法,以提升弱信号探测能力。

2025年发展现状与趋势
目前,固态激光雷达已从实验室走向工程化应用。多家头部传感器厂商及车企已推出相关产品,部分已进入量产车型前装序列。然而,市场主力仍为以MEMS微振镜为代表的半固态方案,纯固态的OPA与Flash LiDAR在性能一致性、量产成熟度及成本控制上仍需突破。
行业共识是,OPA路线若能突破工艺瓶颈,有望实现芯片级集成,带来革命性的成本下降与可靠性提升。Flash路线则在补盲、舱内感知等特定场景中逐步落地。两者共同推动激光雷达向更固态化、高性能、低成本方向演进。
总结与展望
全固态激光雷达通过电子与光学创新取代机械扫描,代表了传感器向高可靠、易量产演进的重要方向。尽管目前技术尚未完全成熟,但其在体积、成本和适应性上的优势已十分明显。随着半导体工艺进步、光电集成度提升及感知算法优化,全固态LiDAR有望在未来成为L3及以上自动驾驶系统的标准配置,并为机器人、智慧城市等广阔领域提供核心三维感知能力。 |  发表于 2025-12-24 01:38:53
|
查看: 286|
回复: 0
发表于 2025-12-24 01:38:53
|
查看: 286|
回复: 0
