特斯拉的 FSD、Waymo 的无人出租车、百端的 Apollo……当我们谈论自动驾驶时,脑海中浮现的往往是那些动辄千万美元研发投入、配备数十个激光雷达的“黑科技怪兽”。
但你是否想过,一个人、一台树莓派、一对摄像头,就能从零打造一辆真正能自主行驶的 AI 小车呢?
这不是科幻,而是 Instructables 上一个真实存在并斩获了 Grand Prize 大奖的开源项目—— AI Self Driving Car。这个项目以 70 个详尽步骤,完整覆盖了从 3D 打印、硬件组装到软件算法配置的全过程。
更重要的是,它用事实证明了一个观点:
自动驾驶不是大公司的专利,它可以是每一个工程师的周末项目。
今天,让我们一同拆解这个硬核项目,看看如何在自己的工作台上,复现自动驾驶的核心技术链。
项目概述:一个可动手的工程闭环
该项目围绕“让小车在道路环境中自主行驶”这一目标,清晰地拆解了自动驾驶的工程实现路径:感知 → 决策 → 控制。它通过摄像头感知环境,利用算法进行理解和决策,再将指令转换为电机控制信号驱动车辆,形成了一个完整且可迭代优化的工程闭环。
为何值得关注?三大核心亮点
1. 纯视觉感知方案
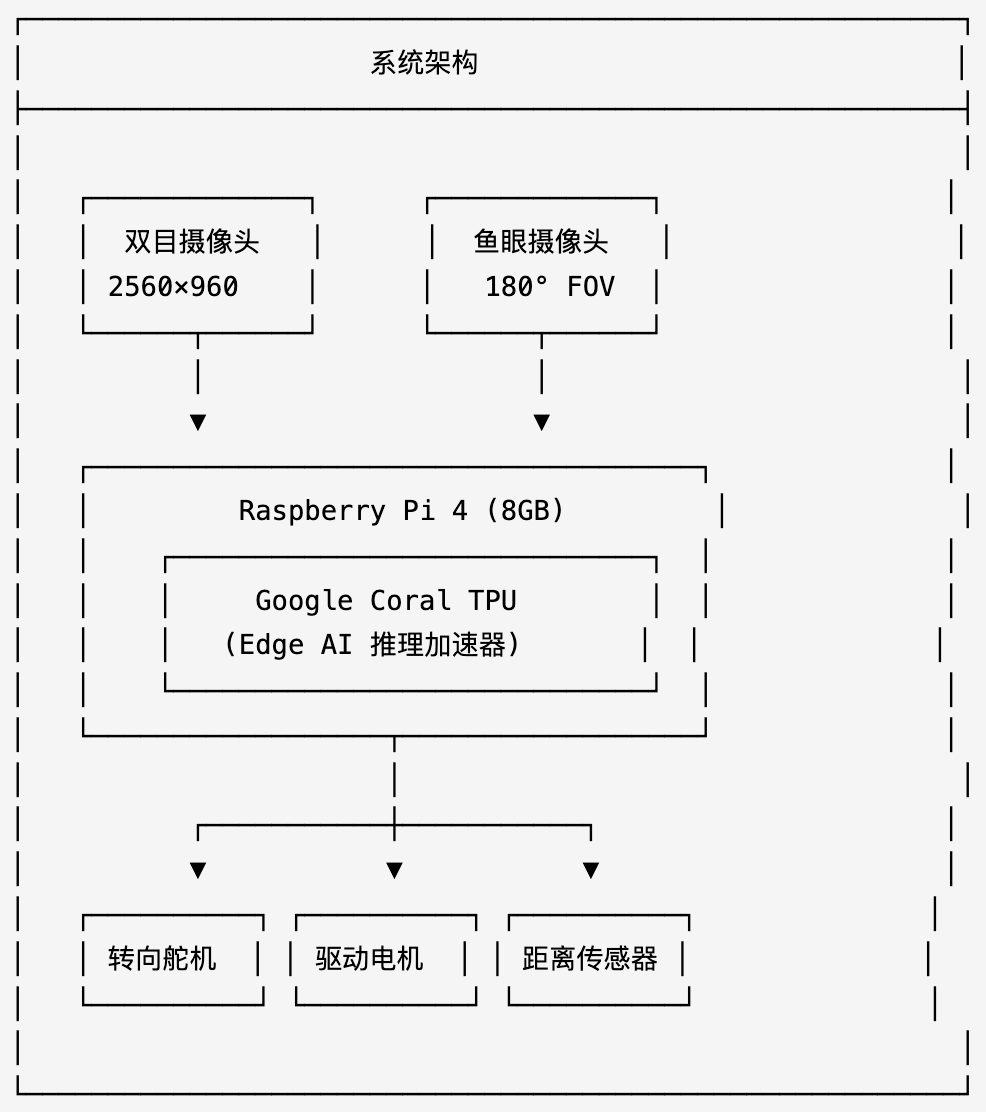
当许多项目依赖激光雷达时,本项目选择了一条与特斯拉技术路线相似的 纯视觉方案。它使用双目立体摄像头实现物理层面的深度感知,搭配180°鱼眼镜头扩大视野,再通过经典的计算机视觉算法进行车道检测和障碍物识别,不依赖海量标注数据,原理直观可靠。
2. 边缘计算赋能实时推理
自动驾驶对延迟要求苛刻。为了实现真正的实时处理,项目引入了 Google Coral USB 加速器。这颗 Edge TPU 协处理器能在功耗仅 2W 的情况下,于树莓派上实现每秒数百帧的神经网络推理,解决了边缘设备算力不足的瓶颈。
3. 完整的工程闭环:自制测试平台
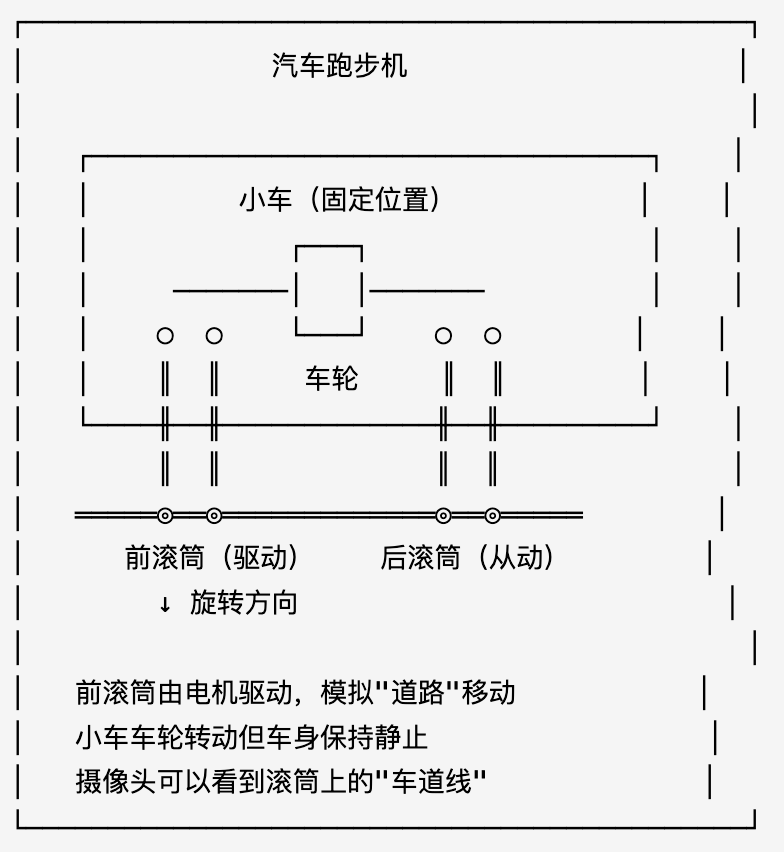
最体现“硬核”精神的,是作者为测试而自制的汽车跑步机。由于无法在真实道路上无限制测试,作者直接设计并制作了一个由电动滚筒组成的平台,让小车“原地跑步”,从而安全、可控、可重复地验证算法。这种“没有条件就创造条件”的工程思维,是项目的灵魂所在。

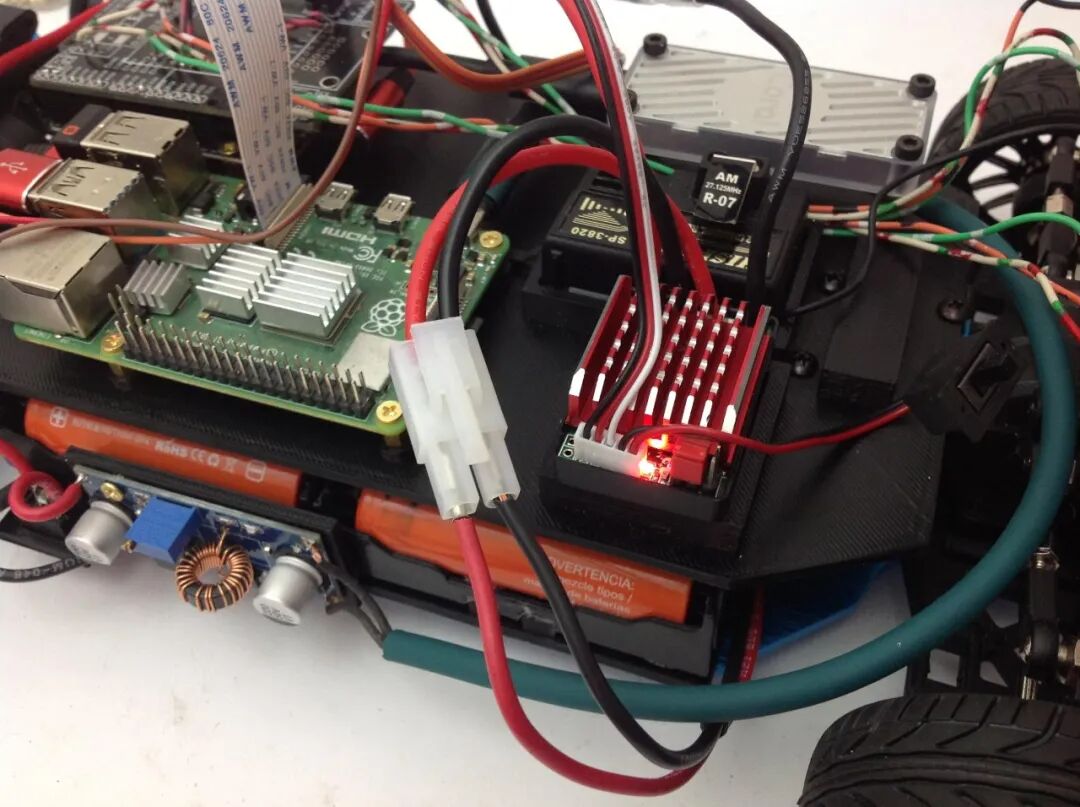
硬件架构详解
核心电子元件清单
| 组件 |
型号/规格 |
作用 |
| 主控制器 |
Raspberry Pi 4 (8GB) |
运行Linux系统,处理视觉算法 |
| AI加速器 |
Google Coral USB Accelerator |
Edge TPU,加速神经网络推理 |
| 主摄像头 |
同步双目立体摄像头 |
2560×960分辨率,用于深度感知 |
| 广角摄像头 |
树莓派相机 + 180°鱼眼镜头 |
全景视野,辅助车道检测 |
| 辅助控制器 |
Wemos D1 R32 (ESP32) |
WiFi/蓝牙,控制车灯和传感器 |
| 距离传感器 |
VL53L0激光测距 / SHARP红外测距 |
前方障碍物检测 |
| 驱动电机 |
550有刷电机 + ESC电调 |
提供动力 |
| 转向系统 |
金属齿轮舵机 |
精确转向控制 |
| 电源 |
双18650锂电池组 |
供电(需搭配降压模块) |
硬件选型思路:性价比与可靠性
- 为何选择树莓派4而非Jetson Nano? 树莓派4 + Coral TPU的组合在性价比上更优,功耗和散热管理也更简单,模块化设计便于维护升级。
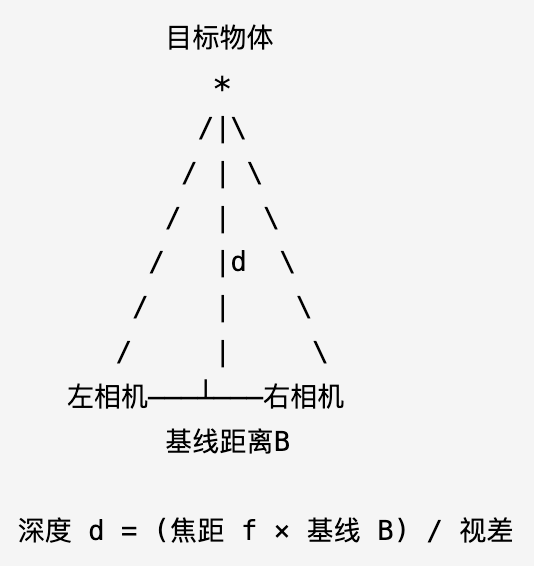
- 为何选择双目而非单目? 双目视觉基于三角测量原理直接计算深度,物理原理简单可靠,不依赖数据训练,精度稳定且计算量相对较小。
软件与算法栈
技术栈分层
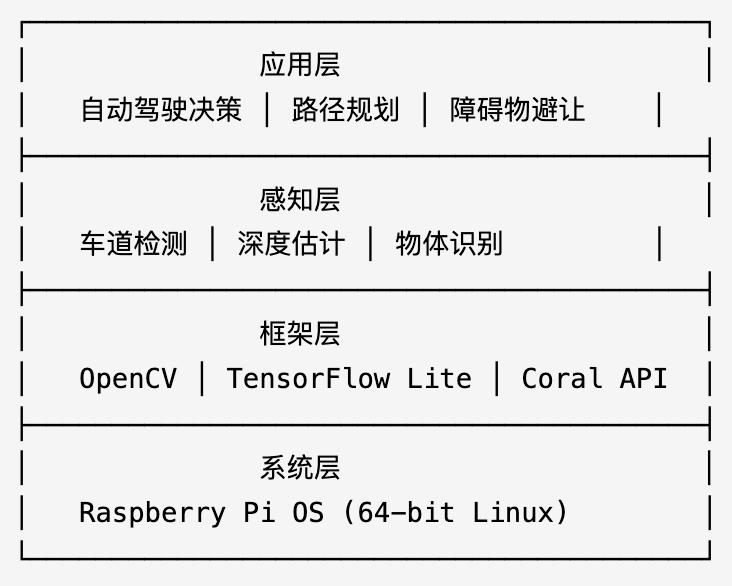
项目软件架构清晰,自底向上分为四层:
核心算法模块
-
车道检测
基于 OpenCV 的经典流水线:图像预处理 → Canny边缘检测 → ROI区域提取 → 霍夫变换检测直线 → 线段聚类和拟合。
-
深度感知
双目立体匹配流程:左右图像矫正 → 立体匹配(如SGBM算法)→ 生成视差图 → 将视差转换为深度信息。
-
实时目标检测
利用 Google Coral 加速预训练的 MobileNet SSD 模型,实现每秒100+帧的行人、车辆等目标检测。
机械结构与3D打印
项目外壳及大量结构件通过3D打印完成,体现了开源和可定制化的优势。
主要3D打印零件
| 零件名称 |
数量 |
用途 |
| 前格栅+保险杠 |
1 |
外观及摄像头安装 |
| 摄像头支架 |
1 |
固定双目和鱼眼摄像头 |
| 电池仓 |
1 |
容纳双18650电池组 |
| 电子元件底座 |
1 |
安装树莓派、Coral等 |
| 后灯壳 |
2 |
安装LED尾灯 |
| 跑步机滚筒及支架 |
多件 |
测试平台核心部件 |
后处理技巧
作者分享了几点实用经验:
- 热熔螺母嵌入:使用烙铁将M3热熔螺母嵌入打印件,连接比自攻螺丝更牢固。
- 打磨与喷涂:提升零件外观质感。
- 多次试装:确保各部件公差合适,组装顺畅。


自制跑步机测试平台
这是整个项目最具创意和工程价值的部分,为小车打造了一个专属“健身房”。
设计理念与优势
在真实道路测试危险且受限制,仿真测试又与硬件脱节。自制的跑步机平台实现了:
- 安全:车身固定,避免碰撞损坏。
- 可控:滚筒速度精确可调,模拟不同车速。
- 可重复:相同条件下无限次测试算法。
- 节省空间与成本:无需大型场地,制作成本仅需数百元。
工作原理
小车被固定在中央,其车轮放置在前(驱动)、后(从动)两组滚筒上。电机驱动前滚筒转动,模拟“道路”移动,小车车轮随之转动但车身保持静止,摄像头可以观察到绘制在滚筒上的“车道线”。


项目亮点总结
| 维度 |
亮点 |
| 完整性 |
70步详尽教程,从机械到软件全覆盖 |
| 创新性 |
纯视觉方案 + 自制跑步机测试平台 |
| 可复现性 |
完整BOM清单、3D文件、代码全部开源 |
| 性价比 |
总成本约2000-3000元,极具性价比 |
| 教育价值 |
涵盖机械、电子、嵌入式、AI全栈技能 |
| 工程思维 |
体现了“没有条件创造条件”的硬核精神 |
给复刻者的实践建议
分阶段实施
- 第一阶段:遥控车基础(1-2周):完成机械组装和电机控制,实现手动遥控,熟悉硬件系统。
- 第二阶段:视觉系统搭建(1周):安装摄像头,配置树莓派与OpenCV环境,开始采集图像数据。
- 第三阶段:算法开发集成(2-4周):实现车道检测与深度感知,集成Coral进行目标检测,调试控制逻辑。
- 第四阶段:测试与优化(持续):搭建跑步机平台,反复测试,调参,逐步提升自动驾驶性能。
常见问题与解决
| 问题 |
解决方案 |
| 树莓派过热 |
加装散热片与风扇,必要时进行降频处理 |
| 双目摄像头同步差 |
使用硬件同步的双目模组,避免软件同步的延迟 |
| 电池续航短 |
使用更大容量电池组,或通过降低处理帧率优化功耗 |
| 转向控制不精确 |
更换金属齿轮舵机,并仔细校准转向中位 |
总结
1886年,卡尔·本茨发明了第一辆汽车。
2024年,一个普通工程师在车库里造出了自动驾驶汽车。
这中间隔了138年,但技术民主化的速度正在以指数级加快。
当巨头们在自动驾驶赛道投入数十亿美元时,这个项目用不到3000元人民币证明:核心技术并不神秘,阻止普通人进入的往往不是技术门槛,而是信息壁垒。
这70个步骤,不仅是一份造车教程,更是一份打破信息壁垒的宣言。它告诉每一位好奇的工程师、学生和爱好者:你完全可以从零开始,亲手理解和掌握这项改变世界的技术。
这,正是开源精神与工程实践最动人的结合。如果你也对动手实现 AI 应用充满热情,欢迎来 云栈社区 的 开源实战 板块,探索更多有趣的项目。
免责声明:本文内容经整理、翻译自国外开源项目与社区,版权归原作者所有,图片源自原项目,仅用于学习交流。如涉及侵权,请联系我们删除或更正。
项目原文地址:https://www.instructables.com/AI-Self-Driving-Car/
 发表于 2026-2-10 08:23:59
|
查看: 199|
回复: 0
发表于 2026-2-10 08:23:59
|
查看: 199|
回复: 0
