之前在某电商平台花了一百多元购入了一架无人机,初衷是给孩子玩耍。进行了数次户外飞行测试后,不慎撞坏了一片桨叶。趁着最近有空,决定对其进行一次彻底的拆解,一探究竟。
当时试飞时,它能飞得挺高,但惯性较大,方向不易精准掌控。它虽具备图传功能,但实际成像质量较为一般,画面为黑白且较为模糊,因此该功能几乎形同虚设。考虑到其价格,也就不作过高要求了。
无人机附带一个黑色的便携拉链包作为外包装。

打开包装,里面包含无人机主体、遥控器以及一些配件和说明书。

附带的用户手册共8页,内容涵盖安装步骤、安全注意事项、遥控器功能说明、飞行控制指南以及故障排查指引,且配有中英文对照。图文并茂的形式对新手相当友好。
这是桨叶的保护支架。

无人机共有四个桨叶,每片都不同,需仔细查看其上丝印的标识(如A3、B2)。这种设计是为了满足空气动力学平衡,装错可能导致飞行异常,例如机身抖动,这一点需要特别注意。

无人机配备两块锂电池,一块为备用。

电池模块的正面视角。

模块侧面左右共有4个卡扣,整体未使用螺丝固定,可直接从卡扣处撬开。

可以看到电池生产日期为2024年10月18日,电池包标称容量为2500mAh。实际每次户外飞行时间不长,预计续航能力在20分钟左右。

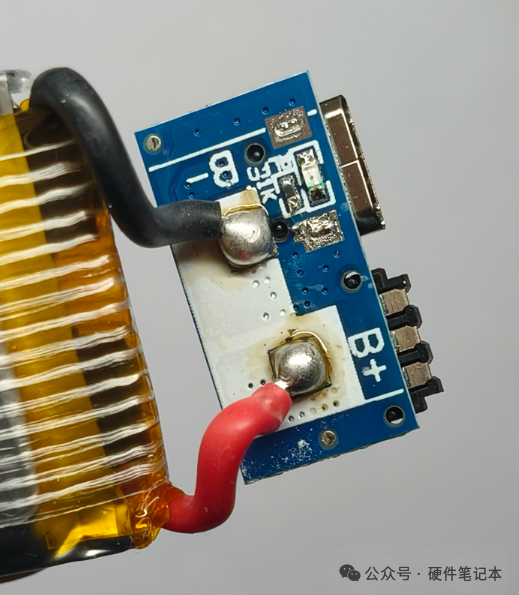
锂电池板上有一颗丝印为LTH7的充电芯片。这是一款专为单节锂电池设计的恒流/恒压线性充电管理芯片,其核心作用是安全、高效地管理充电过程,并集成多种保护与监控功能。

电路板背面直接焊接在锂电池的正负极上,可见焊点锡量较多,所用线径较粗。红色导线(B+)连接电池正极,黑色导线(B-)连接电池负极。
给电池座和Micro USB充电接口一个特写。

配件中包含一条Type-A转Micro USB的充电线,长度大约30厘米。

还配送了一把十字螺丝刀,方便拆卸和简易维修。
这就是遥控器,造型中规中矩,表面印有功能标识:调速、360°翻滚、一键起飞/降落、电源开关等。

如果仍不熟悉按键,可以使用这张覆盖在遥控器上的说明纸,每个按键的功能都有中文备注,一目了然。

通电后,一键起飞/降落按键处会有一个LED指示灯亮起,对新手而言更易上手。

中间的支架可以轻轻抬起并拆开,主要用于放置手机。

放入一部6.5寸的手机完全没有问题,但由于摄像头图传像素太差,实际上很少用到这个功能。

遥控器背面是三节串联的1.5V干电池仓。

拆下电池,拧下螺丝,打开遥控器外壳。
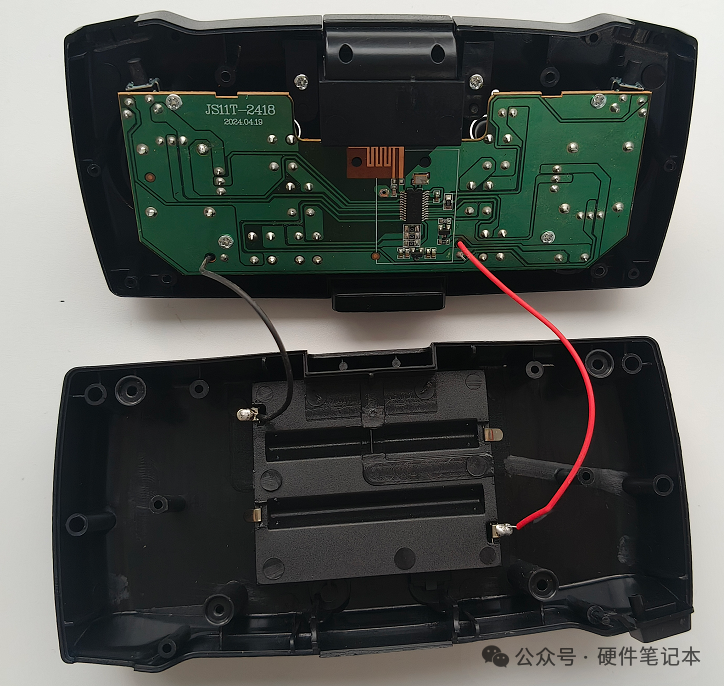
可以看到板载天线,主控芯片型号为FZ418(注:原文此处为FY2418,但根据图片OCR识别为FZ418,以图片为准),在网上未找到相关详细资料。
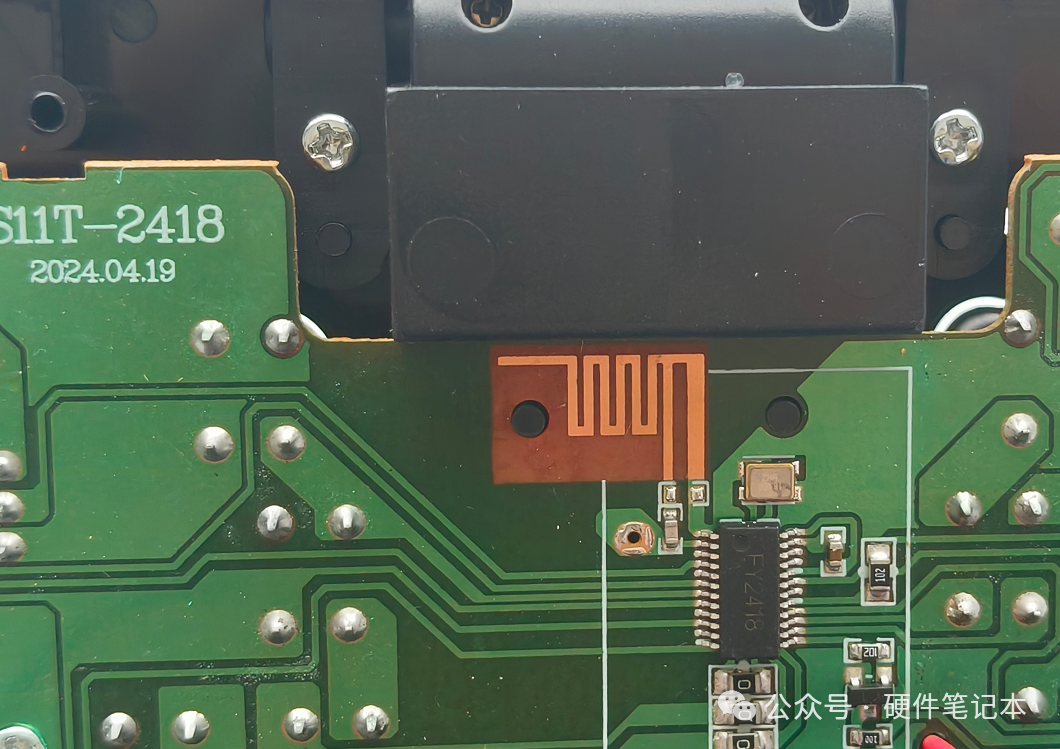
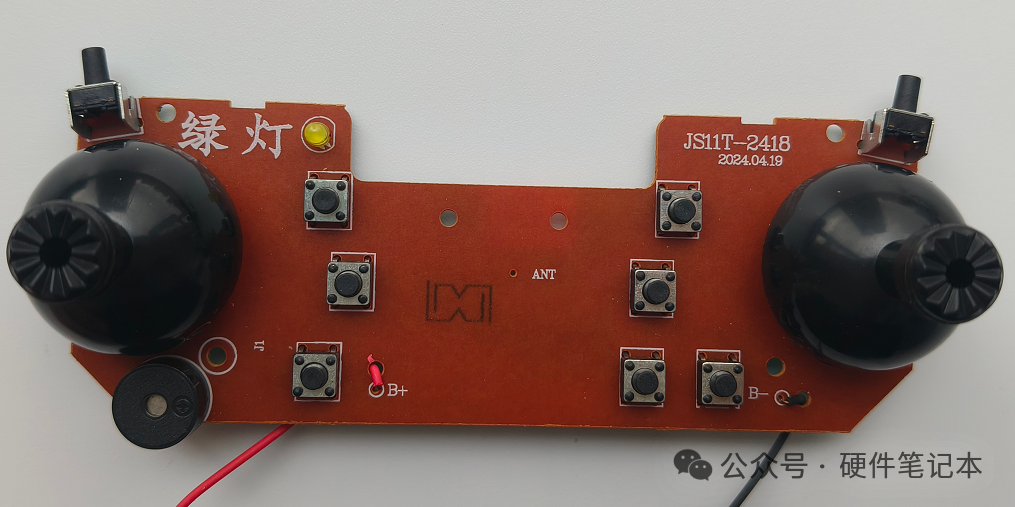
这是电路板的正面,可见是单面板设计。
取下按钮,内部带金属结构的并非普通按键,而是5K摇杆电位器。它是一个双轴控制器,内部集成了两个5KΩ的电位器,分别对应左右(X轴)和上下(Y轴)方向。当我们推动摇杆时,这两个电位器的电阻值会相应变化。设备通过读取电阻值的变化,就能精确判断摇杆的推动方向和幅度,进而转换成控制信号,指挥无人机的飞行。

电池包和遥控器拆解完毕,下面来看看主角——无人机本体。

这是无人机的底部视角。

无人机的侧面视角。

机身正面有两个像眼睛一样的大型LED指示灯。

给螺旋桨及其保护支架一个特写。

其中一个机臂的特写。飞控板通过线缆为电调(ESC)提供电源和PWM信号,电调再根据信号驱动无刷电机运转。

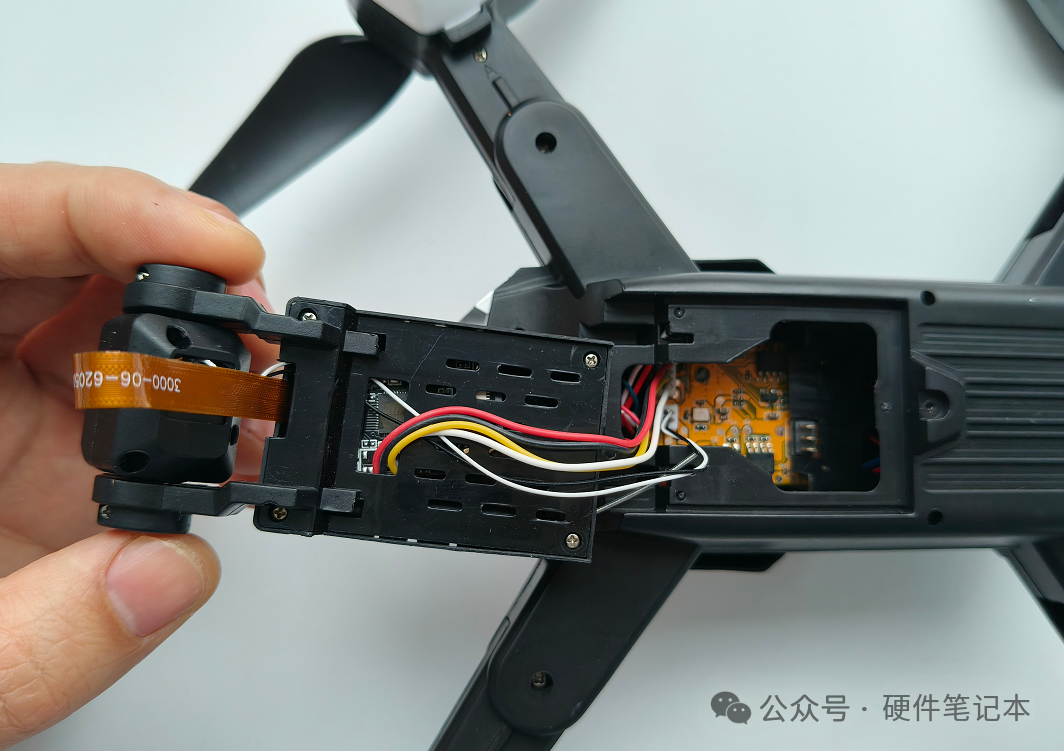
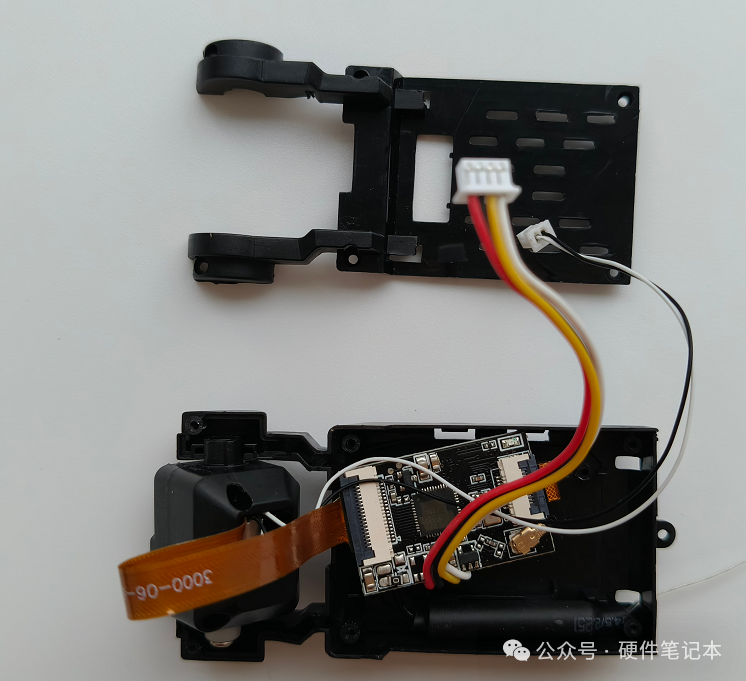
下面从无人机底部开始拆解。手中拿着的部分是摄像头,旁边另一个类似摄像头的模块其实是光流传感器。右边伸出的一根线是2.4G遥控天线。

光流传感器堪称无人机的“地面视觉眼”。
它通过一个朝下的小摄像头快速连续拍摄地面图像,并分析连续帧之间的变化,从而实时感知无人机在水平方向(前后、左右)上的移动速度和距离。
其主要作用有两个:
1、室内或无GPS信号时稳定悬停——让无人机能像直升机一样稳稳地停在空中的某个位置,不会漂移。
2、辅助低空精准飞行——在贴近地面飞行时,控制更加细腻平稳,避免晃动。
简而言之,它让无人机“看清”地面的纹理是如何流动的,从而知道自己是否发生了位移,以及该如何进行修正。

拧下螺丝,可以看到有多根红、黑、黄、白色的导线连接到主板上。
凑近观察,模块通过一个1x2x2.0mm的针座和一个1x4x2.0mm的针座与主板连接。

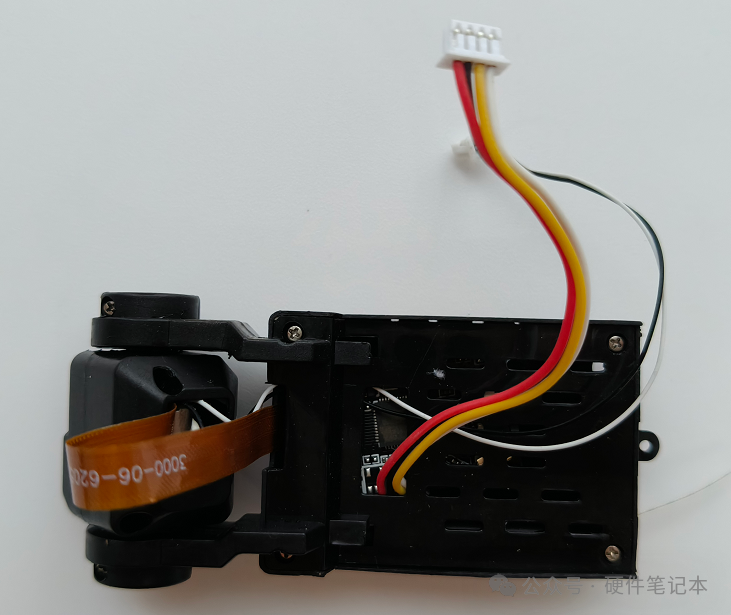
拔掉连接器排线,摄像头和光流传感器模块便取下来了。
拆开无人机的主外壳,内部的电路板便显露出来。
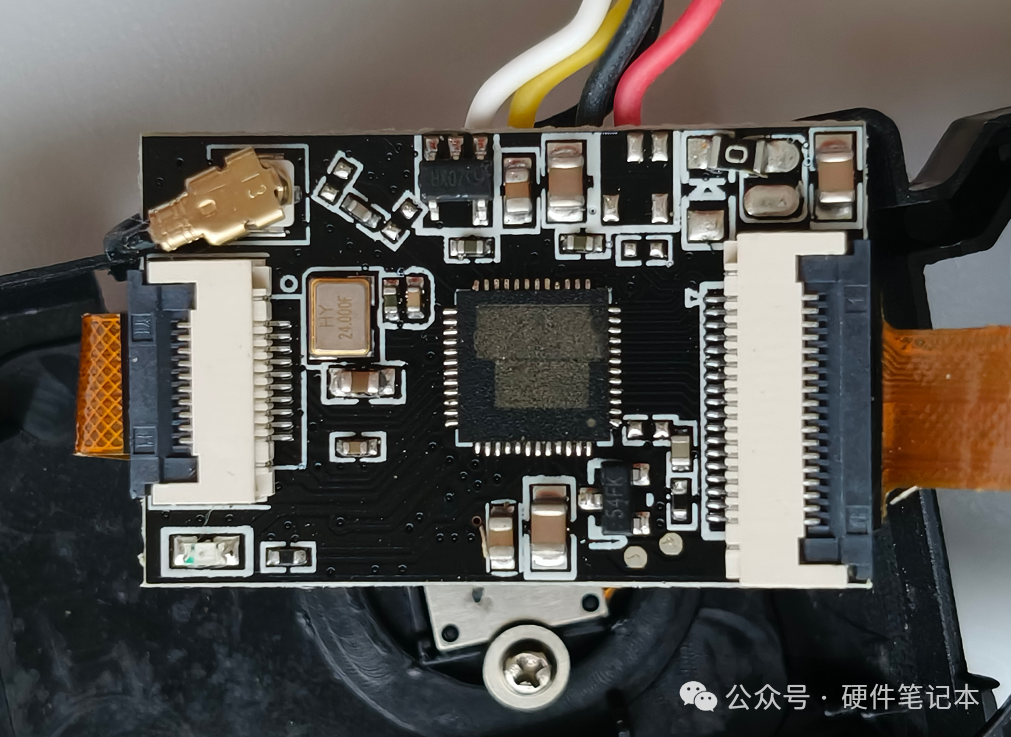
放大观察电路板,可以发现核心芯片上的丝印被明显磨掉了。左右两侧各有一条FPC柔性排线,分别连接摄像头和光流传感器。左侧还有一个IPEX连接器,用于连接2.4G天线。
给天线一个特写。这是一根典型的2.4GHz 3dBi铜管全向天线。它的核心是一段经过精密计算长度的铜管(通常为1/4波长),结构简单坚固。其3dBi的增益意味着信号强度比理想的全向基准天线提升约一倍,适合短距离稳定传输,常见于Wi-Fi扩展、无人机遥控系统及蓝牙模块等2.4GHz设备中。

剥开外层热缩管,确认是铜管材质无疑。铜管能提供更好的信号穿透能力和抗弯折性,比常见的塑料杆天线更耐用。

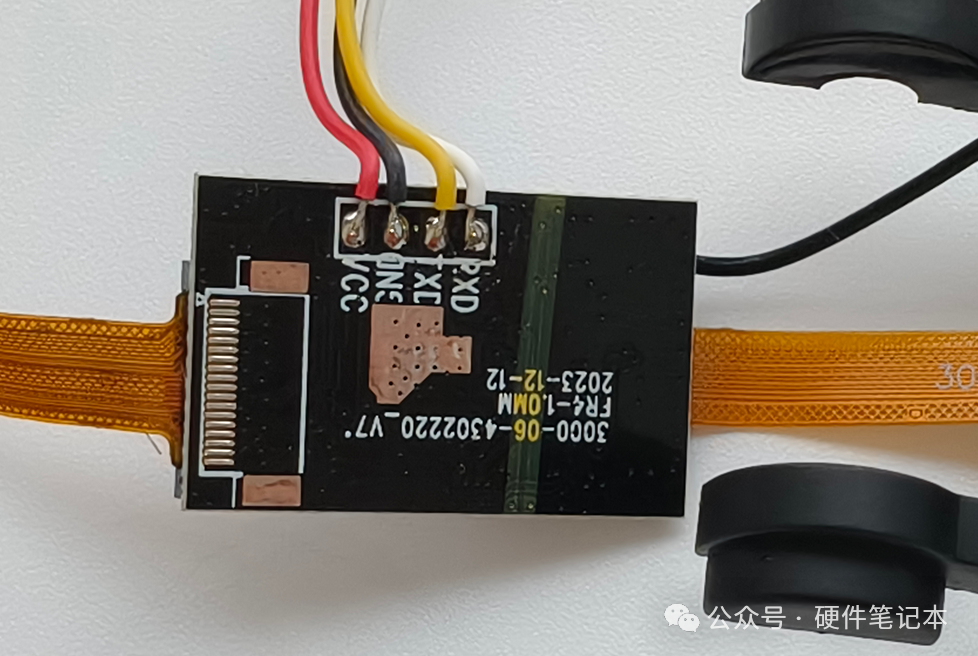
电路板背面可见,与图传模块相连的4Pin连接线,其引脚定义依次为VCC(电源正)、GND(地)、TXD(发送)、RXD(接收),即一个串口通信接口加电源。
最后再看一张无人机内部线缆的全局照片,各种线缆交错,略显复杂。
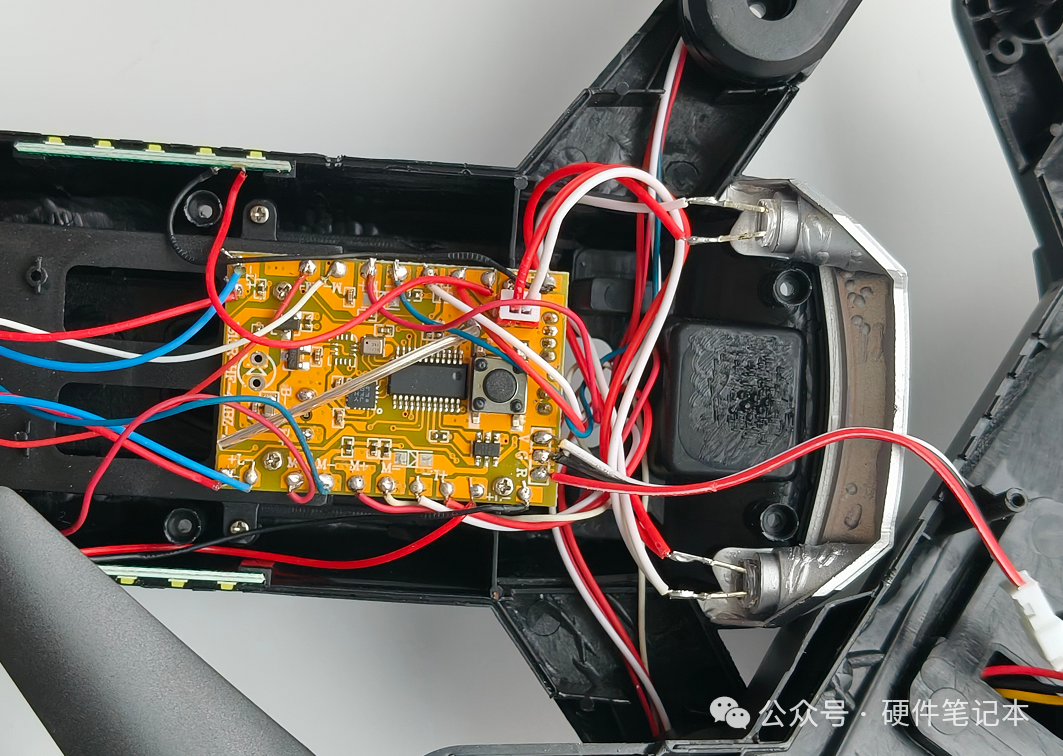
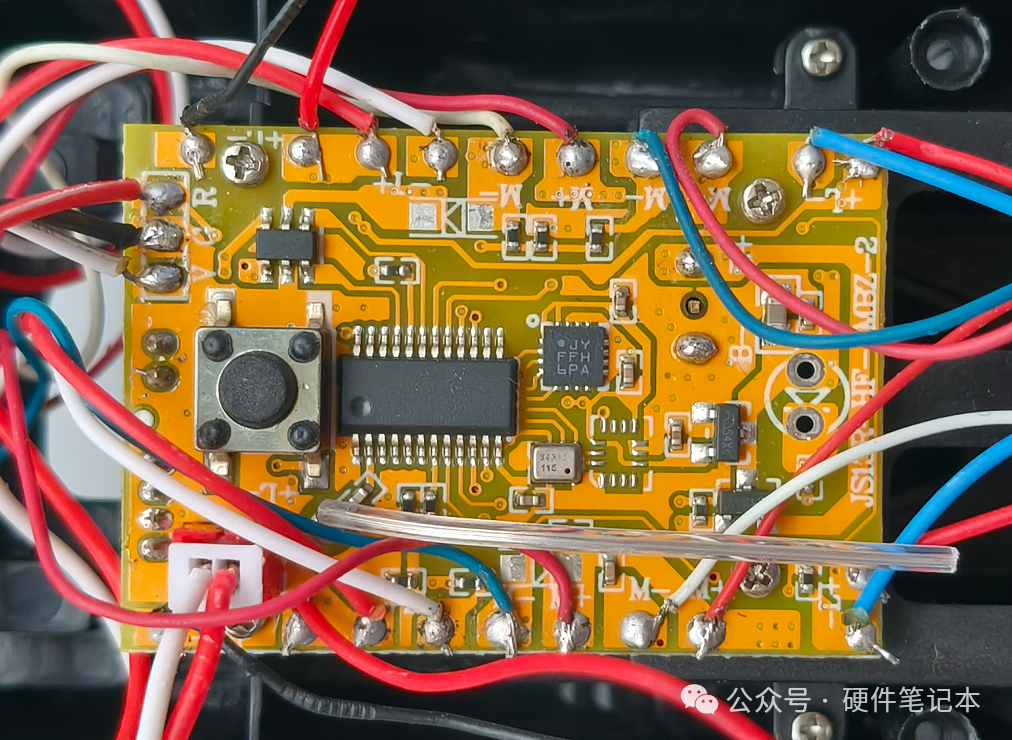
给主飞控板一个最终的特写。
这次拆解过程花费了不少精力。整个拆解、拍照、素材整理以及文稿撰写,陆陆续续用了好几天时间。原计划一篇文章写完,但发现涉及的内容和知识点越挖越多。
无人机通电后的状态,机身上的LED灯带效果看起来还是颇具科技感的。

侧面视角下的灯光效果。

本次关于百元级无人机的实物拆解与硬件分析就到这里。如果你对硬件拆解、电路分析或无人机技术有更多兴趣,欢迎在云栈社区与其他技术爱好者交流探讨。
 发表于 2026-1-25 05:11:26
|
查看: 258|
回复: 0
发表于 2026-1-25 05:11:26
|
查看: 258|
回复: 0
