1 I3C技术演进: 为何I2C需要“改进”?
I3C (Improved Inter Integrated Circuit) 总线是MIPI联盟在2017年正式发布的下一代传感器互连标准,它标志着嵌入式系统内部通信的一个重要演进。在深入技术细节之前,我们需要理解一个基本问题:为什么I2C已经广泛应用数十年后,我们还需要I3C?
想象一下,现代智能手机或物联网设备中的传感器生态系统——加速度计、陀螺仪、环境光传感器、气压计、温湿度传感器等,这些设备传统上都通过I2C总线连接。但I2C存在几个根本性限制:首先,它需要额外的中断线 (INT) 来实现传感器中断功能,这增加了PCB布线的复杂性和成本;其次,I2C的地址冲突问题一直困扰着系统设计者,特别是当多个相同型号的传感器需要同时工作时;最后,I2C的速度上限有限,无法满足高带宽传感器 (如图像传感器) 的需求。
I3C的设计哲学是“改进而非革命”——它在保留I2C双线架构 (SDA和SCL) 的前提下,通过协议层的创新解决了上述问题。有趣的是,I3C可以向后兼容I2C设备,这意味着现有I2C传感器可以直接接入I3C总线,享受部分新特性 (如动态地址分配) ,而无需硬件修改。这种渐进式升级路径是I3C被工业界迅速采纳的关键因素之一。
2 I3C核心概念解析: 不仅仅是“更快的I2C”
2.1 协议层次与通信模型
I3C协议栈可以分为物理层、数据链路层和应用层三个主要部分。与I2C的单主多从架构不同,I3C引入了更灵活的层次结构:
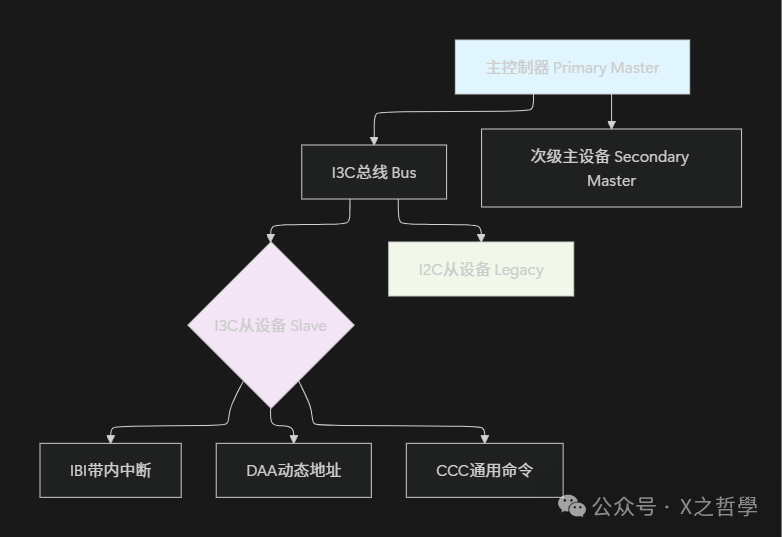 主控制器 (Primary Master)是总线的唯一仲裁者,负责初始化、动态地址分配和总线管理。次级主设备 (Secondary Master) 则可以在主控制器授权下临时控制总线,这种设计在复杂系统中特别有用,例如当多个处理器需要访问传感器数据时。
主控制器 (Primary Master)是总线的唯一仲裁者,负责初始化、动态地址分配和总线管理。次级主设备 (Secondary Master) 则可以在主控制器授权下临时控制总线,这种设计在复杂系统中特别有用,例如当多个处理器需要访问传感器数据时。
2.2 关键创新特性详解
1. 带内中断 (IBI) 机制
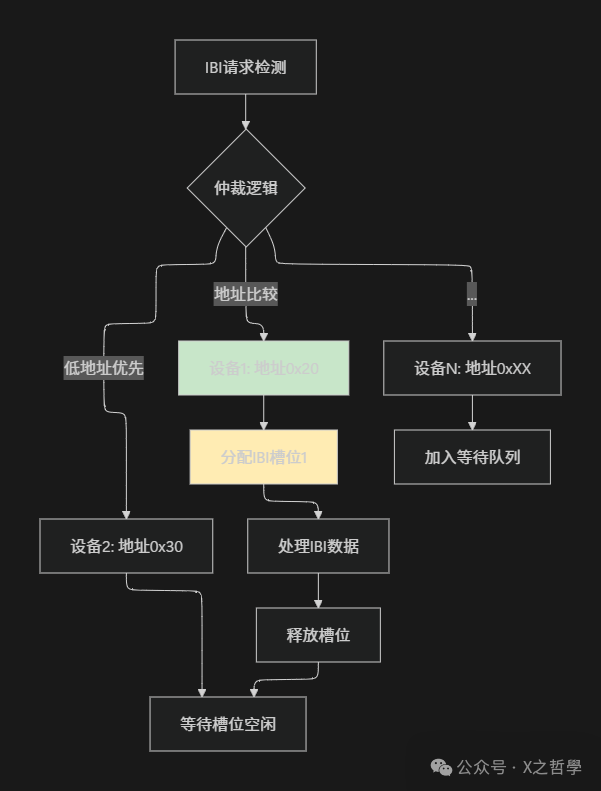
这是I3C最具革命性的创新之一。在I2C中,每个需要中断功能的传感器都需要一根独立的中断线。而在I3C中,从设备可以通过拉低SDA线来“请求”主设备启动通信,从而实现带内中断。这个过程有严格的仲裁机制:如果多个设备同时请求中断,地址较低的设备优先获得响应。
2. 动态地址分配 (DAA)
每个I3C设备都有48位的唯一临时ID,由制造商ID、部件ID和实例ID组成。系统启动时,主控制器通过DAA过程为每个设备分配一个7位的动态地址,完全避免了地址冲突。即使两个相同的传感器连接到同一总线,它们也能获得唯一地址。
3. 通用命令代码 (CCC)
CCC是I3C的控制平面协议,类似于网络协议中的控制报文。所有I3C设备必须支持一组核心CCC命令,例如:
- • SETAASA: 命令所有支持动态地址的设备使用其静态地址 (如果有)
- • RSTDAA: 重置所有设备的动态地址
- • ENTDAA: 启动动态地址分配过程
CCC可以通过广播方式发送到所有设备,或通过直接方式发送到特定设备,这种灵活性大大简化了总线管理。
4. 总线特性寄存器 (BCR) 和设备特性寄存器 (DCR)
每个I3C设备都有这两个只读寄存器,分别描述设备的总线能力和设备类型。主控制器可以读取这些寄存器来自动发现和配置设备。例如,DCR可以告诉系统这是一个加速度计 (0x08) 还是陀螺仪 (0x09) ,而BCR则说明设备是否支持IBI、最大数据速率等能力。
3 Linux I3C驱动框架: 架构设计与实现
3.1 整体架构概览
Linux内核的I3C子系统采用分层架构设计,这确保了硬件抽象和通用逻辑的分离。整个框架可以分为四个主要层次:
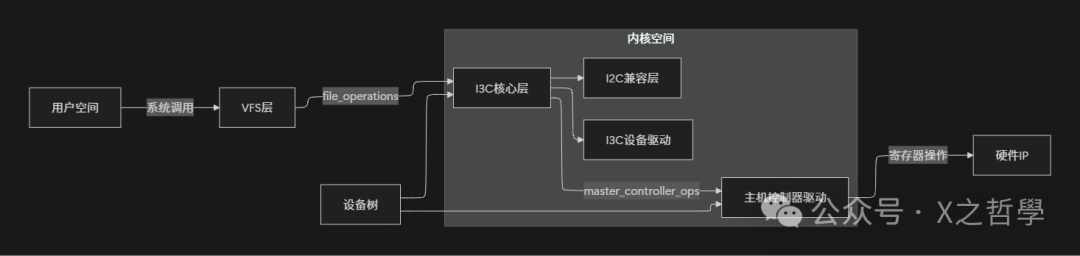 用户空间通过标准文件接口 (
用户空间通过标准文件接口 (/dev/i3cX) 访问I3C设备,这与I2C和SPI子系统保持一致的设计哲学,降低了开发者的学习成本。VFS层将文件操作转换为内核的通用操作模型。I3C核心层是整个子系统的大脑,负责设备管理、地址分配、CCC命令分发等通用逻辑。熟悉Linux系统底层机制有助于更好地理解这套驱动框架的分层设计理念。
3.2 核心数据结构剖析
I3C驱动框架围绕几个关键数据结构构建,理解这些结构是深入掌握该技术的关键:
1. struct i3c_master_controller - 主控制器抽象
// 简化后的核心字段
struct i3c_master_controller {
struct device *dev;
struct i3c_bus *bus;
const struct i3c_master_controller_ops *ops;
unsigned long *free_slots;
struct list_head i3cdevs;
struct list_head i2cdevs;
};
这个结构体代表一个I3C主机控制器实例。ops字段是硬件抽象的关键,它包含了一组回调函数,将核心层的通用操作映射到具体硬件的寄存器操作。
2. struct i3c_master_controller_ops - 操作集合
struct i3c_master_controller_ops {
int (*bus_init)(struct i3c_master_controller *master);
int (*attach_i3c_dev)(struct i3c_device *dev);
int (*attach_i2c_dev)(struct i2c_device *dev);
int (*ccc_xfer)(struct i3c_master_controller *master,
struct i3c_ccc_cmd *cmd);
int (*priv_xfers)(struct i3c_device *dev,
struct i3c_priv_xfer *xfers,
int nxfers);
};
这个操作集合定义了硬件驱动必须实现的功能。例如,ccc_xfer负责发送CCC命令,而priv_xfers处理普通的I3C数据传输。
3. struct i3c_priv_xfer - 数据传输单元
struct i3c_priv_xfer {
u8 *data;
size_t len;
bool rnw; // 读/写标志
};
这个简单的结构体封装了一次数据传输操作。多个i3c_priv_xfer可以组成一个传输序列,支持复杂的读写组合操作。
3.3 设备发现与初始化流程
I3C设备的初始化是一个多阶段过程,涉及硬件探测、地址分配和功能协商:
第一阶段: 总线初始化
// 简化流程
static int i3c_master_bus_init(struct i3c_master_controller *master)
{
// 1. 启用控制器时钟和电源
// 2. 配置SDA/SCL引脚
// 3. 设置总线速度 (典型值: 12.5 MHz)
// 4. 发送广播CCC: ENTDAA启动动态地址分配
ret = master->ops->ccc_xfer(master, &entdaa_cmd);
if (ret)
return ret;
// 5. 读取每个设备的BCR/DCR
// 6. 为设备分配动态地址
// 7. 配置IBI (如果设备支持)
}
第二阶段: 动态地址分配 (DAA)
DAA过程是I3C最复杂的部分之一。主控制器首先广播ENTDAA命令,然后通过仲裁过程逐一识别每个设备。这个过程确保即使多个设备同时响应,也能正确分配唯一地址。
4 硬件控制与寄存器级实现
4.1 引脚控制机制
I3C的物理层控制体现在对SDA和SCL引脚的精确管理上。从中可以清楚地看到寄存器级实现:
// 从Rust嵌入式代码看I3C引脚控制
pub struct OUTCTL_SPEC; // 输出控制寄存器
// SDA输出控制字段
pub enum SDOC_A {
#[doc = "0: I3C drives the SDAn pin low."]
_0 = 0,
#[doc = "1: I3C releases the SDAn pin."]
_1 = 1,
}
// SCL输出控制字段
pub enum SCOC_A {
#[doc = "0: I3C drives the SCLn pin low."]
_0 = 0,
#[doc = "1: I3C releases the SCLn pin."]
_1 = 1,
}
这些枚举值直接对应硬件寄存器的位设置。值得注意的是,I3C引脚控制比I2C更复杂,因为它需要支持不同速率的通信模式(SDR、HDR等) ,还需要处理开漏和推挽输出的动态切换。
4.2 时序控制与延时补偿
I3C规范定义了严格的时序要求,特别是在高速模式下。从可以看到,硬件提供精细的延时控制:
// SDA输出延时控制
pub enum SDOD_A {
#[doc = "0: No output delay"]
_000 = 0,
#[doc = "1: 1 I3Cφ cycle"]
_001 = 1,
#[doc = "2: 2 I3Cφ cycles"]
_010 = 2,
// ... 最多7个时钟周期的延时
}
这种可编程延时机制允许系统设计者根据PCB布线长度和负载特性微调信号时序,确保在高速通信下的信号完整性。这属于嵌入式开发中细致的硬件控制与调试范畴。
5 实战: 实现温度传感器驱动
5.1 硬件配置与设备树
我们以常见的P3T1755温度传感器为例,展示完整的I3C驱动实现。首先需要配置设备树:
// i3c控制器节点
i3c0: i3c@f0000000 {
compatible = "vendor,i3c-controller";
reg = <0xf0000000 0x1000>;
clocks = <&i3c_clk>;
#address-cells = <1>;
#size-cells = <0>;
// 温度传感器子节点
temperature-sensor@48 {
compatible = "nxp,p3t1755";
reg = <0x48 0x0>; // 静态地址
// 临时ID用于动态地址分配
assigned-provisional-id = /bits/ 48 <0x035 0x001 0x00 0x00>;
};
};
设备树中的assigned-provisional-id字段特别重要。它是一个48位的值,编码了制造商ID、部件ID和实例ID,确保即使在动态地址分配后,系统也能正确识别设备。
5.2 驱动实现核心代码
// 驱动初始化和探测
static int p3t1755_probe(struct i3c_device *i3cdev)
{
struct device *dev = &i3cdev->dev;
struct p3t1755_data *data;
int ret;
// 1. 分配驱动数据结构
data = devm_kzalloc(dev, sizeof(*data), GFP_KERNEL);
if (!data)
return -ENOMEM;
// 2. 初始化I3C设备句柄
data->i3cdev = i3cdev;
i3c_device_set_priv(i3cdev, data);
// 3. 读取设备识别信息
ret = p3t1755_read_device_id(data);
if (ret) {
dev_err(dev, "Failed to read device ID\n");
return ret;
}
// 4. 配置传感器
ret = p3t1755_configure(data);
if (ret)
return ret;
// 5. 注册温度传感器IIO设备
return p3t1755_register_iio(dev, data);
}
// 温度读取函数
static int p3t1755_read_temp(struct p3t1755_data *data, int *temp)
{
struct i3c_priv_xfer xfers[2];
u8 reg = P3T1755_REG_TEMP;
u8 buf[2];
int ret;
// 设置传输序列: 先写寄存器地址,再读数据
xfers[0].data = ®
xfers[0].len = 1;
xfers[0].rnw = false; // 写操作
xfers[1].data = buf;
xfers[1].len = 2;
xfers[1].rnw = true; // 读操作
// 执行I3C传输
ret = i3c_device_do_priv_xfers(data->i3cdev, xfers, 2);
if (ret < 0)
return ret;
// 转换原始数据为温度值
*temp = (buf[0] << 8) | buf[1];
*temp = *temp >> 4; // 12位精度
return 0;
}
这个示例展示了I3C驱动开发的关键模式:初始化探测、数据传输和硬件抽象。值得注意的是,I3C驱动大量使用i3c_device_do_priv_xfers()函数进行数据传输,这比传统的I2Cread/write接口更灵活,支持复杂的传输序列。
6 高级特性: IBI带内中断实现
6.1 IBI请求与处理机制
IBI是I3C最引人注目的特性之一,它允许从设备在没有主设备主动轮询的情况下发起通信。实现IBI需要主从设备双方的协作:
// 从设备角度: 请求IBI
static int sensor_request_ibi(struct i3c_device *i3cdev)
{
struct i3c_ibi_setup ibi_req;
int ret;
// 配置IBI参数
memset(&ibi_req, 0, sizeof(ibi_req));
ibi_req.handler = sensor_ibi_handler; // 中断处理函数
ibi_req.max_payload_len = 2; // IBI携带的数据长度
ibi_req.num_slots = 1; // IBI槽位数
// 请求IBI能力
ret = i3c_device_request_ibi(i3cdev, &ibi_req);
if (ret) {
dev_err(&i3cdev->dev, "Failed to request IBI\n");
return ret;
}
// 启用IBI
i3c_device_enable_ibi(i3cdev);
return 0;
}
// IBI处理函数
static void sensor_ibi_handler(struct i3c_device *i3cdev,
const struct i3c_ibi_payload *payload)
{
struct sensor_data *data = i3c_device_get_priv(i3cdev);
u8 ibi_data;
if (payload->len > 0) {
ibi_data = payload->data[0];
// 处理中断数据
switch (ibi_data & 0x0F) {
case SENSOR_DATA_READY:
schedule_work(&data->data_work);
break;
case SENSOR_ALERT:
dev_warn(&i3cdev->dev, "Sensor alert!\n");
break;
}
}
}
从设备通过拉低SDA线发起IBI请求,主设备检测到这一信号后,启动一个仲裁过程来确定哪个设备在请求中断。然后主设备发送IBI确认并读取中断数据。
6.2 IBI性能优化考虑
在实际系统中,多个传感器可能同时产生中断。Linux I3C子系统使用IBI槽位 (slot) 机制来管理这种情况:
 这种设计确保了公平性和可预测性,但也带来了性能挑战。在提到的MCTP-I3C驱动中,开发者为解决多线程竞争问题增加了互斥锁:
这种设计确保了公平性和可预测性,但也带来了性能挑战。在提到的MCTP-I3C驱动中,开发者为解决多线程竞争问题增加了互斥锁:
// 修复多线程问题的关键代码
static int mctp_i3c_read(struct mctp_i3c_device *mi)
{
struct sk_buff *skb;
int rc;
/* 确保netif_rx()以与i3c相同的顺序被读取 */
mutex_lock(&mi->lock); // 新增的互斥锁
rc = i3c_device_do_priv_xfers(mi->i3c, &xfer, 1);
if (rc < 0)
goto err;
// ... 处理数据包
mutex_unlock(&mi->lock); // 释放锁
return 0;
err:
mutex_unlock(&mi->lock);
kfree_skb(skb);
return rc;
}
这个修复解决了在多线程环境下,多个数据包可能乱序到达的问题,这对于需要保证数据顺序的应用 (如MCTP协议) 至关重要。
7 调试工具与故障排除
7.1 软件调试工具链
Linux为I3C提供了一套完整的调试工具,可以通过sysfs接口访问:
# 查看系统中所有的I3C总线
ls /sys/bus/i3c/devices/
# 查看特定I3C总线上的设备
ls /sys/bus/i3c/devices/i3c-0/
# 读取设备的动态地址
cat /sys/bus/i3c/devices/i3c-0/0-48/address
# 查看设备的BCR和DCR寄存器
cat /sys/bus/i3c/devices/i3c-0/0-48/bcr
cat /sys/bus/i3c/devices/i3c-0/0-48/dcr
# 启用动态调试输出 (需要内核配置)
echo -n 'file i3c* +p' > /sys/kernel/debug/dynamic_debug/control
7.2 硬件调试工具
对于硬件级调试,专业的I3C分析工具是必不可少的。提到的I3C Host Adapter Pro+就是这样的工具,它可以:
1. 协议分析: 捕获和解析I3C总线上的所有通信,包括CCC命令、IBI请求和数据传输。
2. 时序测量: 精确测量SDA和SCL信号的时间参数,帮助识别时序相关问题。
3. 设备模拟: 模拟I3C主设备或从设备,便于测试和调试。
4. 性能分析: 统计总线利用率、冲突次数等性能指标。
7.3 常见问题与解决方案
| 问题现象 |
可能原因 |
调试方法 |
解决方案 |
| 设备无法识别 |
供电问题、引脚配置错误、时序不匹配 |
检查设备树配置、测量电源电压、使用逻辑分析仪捕获信号 |
调整设备树中的时钟配置、检查PCB布线、添加上拉电阻 |
| IBI中断丢失 |
总线负载过高、仲裁冲突、从设备配置错误 |
启用内核动态调试、降低总线速度、增加IBI槽位 |
优化中断处理函数、调整设备优先级、增加mutex保护 |
| 数据传输错误 |
信号完整性问题、电磁干扰、驱动bug |
使用示波器检查信号质量、添加端接电阻、审查驱动代码 |
改善PCB布局、降低通信速率、修复驱动中的并发问题 |
| 动态地址分配失败 |
临时ID冲突、CCC命令超时、设备不响应 |
检查设备树中的provisional ID、增加DAA超时时间 |
确保每个设备有唯一ID、调整总线驱动参数 |
8 I3C与其他总线协议对比
为了全面理解I3C的定位和价值,我们需要将其放在更广阔的总线协议生态中审视:
| 特性维度 |
I2C |
I3C |
SPI |
评价与分析 |
| 引脚数量 |
2 (+INT) |
2 |
4+ |
I3C在引脚效率上明显优于需要额外中断线的I2C,接近SPI的灵活性 |
| 最大速度 |
3.4 Mbps |
12.5 Mbps (SDR)
33 Mbps (HDR) |
50+ Mbps |
I3C在速度和复杂性间取得了良好平衡,满足大多数传感器需求 |
| 拓扑结构 |
多从设备 |
多主设备能力 |
点对点/菊花链 |
I3C的多主能力为系统设计提供了前所未有的灵活性 |
| 功耗特性 |
中等 |
低 (推挽输出) |
高 |
I3C的推挽输出和门控时钟技术显著降低功耗 |
| 寻址方式 |
静态7位 |
动态7位 + 48位ID |
片选信号 |
I3C的动态地址完全解决了I2C的地址冲突问题 |
| 中断机制 |
专用INT线 |
带内中断 (IBI) |
无标准 |
IBI是I3C的杀手特性,大幅简化系统设计 |
| 兼容性 |
- |
完全兼容I2C |
不兼容 |
I3C的向后兼容性保护了现有投资 |
从比较中可以看出,I3C并不是要取代SPI或I2C,而是在特定应用场景(主要是传感器集线) 中提供了一个更优的解决方案。它的设计哲学是:在保持简单性的同时,解决I2C在实际部署中的痛点。
9 总结: I3C的技术哲学与实践价值
通过本文的深入分析,我们可以从多个维度总结I3C的技术特点和实践价值:
技术演进维度: I3C代表了嵌入式通信协议的渐进式创新典范。它没有彻底抛弃I2C的成熟基础,而是在此基础上通过巧妙的协议扩展解决了实际部署中的痛点。这种设计哲学确保了技术的平稳过渡和生态系统的快速建立。
系统设计维度: 对于系统架构师而言,I3C提供了前所未有的灵活性和简化。动态地址分配消除了硬件布局的限制,IBI机制减少了引脚数量和PCB复杂度,多主能力支持更复杂的系统拓扑。这些特性使I3C成为现代传感器密集型系统的理想选择。
软件开发维度: Linux I3C子系统展示了现代内核驱动框架的高度模块化和可扩展性。通过清晰的分层架构、统一的数据结构和硬件抽象接口,I3C驱动既保持了硬件多样性支持,又为应用开发者提供了简洁的API。
产业生态维度: 从移动设备到汽车电子,再到工业物联网,I3C正在构建一个跨领域的统一传感器接口生态。这种统一不仅降低了下游厂商的开发成本,也为上游芯片厂商创造了规模经济。
 发表于 2025-12-9 04:02:50
|
查看: 225|
回复: 0
发表于 2025-12-9 04:02:50
|
查看: 225|
回复: 0
