用 Codex 的体感,以前是这样的:你给它一个任务,它做一步,然后停下来等你。你说「继续」,它再做一步,再停。
像一个需要被不停催着走的实习生。
你得全程盯着,稍微走开一会儿,它就在那待命,什么都不干。
用 vibe coding 做过稍微复杂点的项目的人应该懂这种感觉。你脑子里有个完整的目标,但每次只能给它推进一小步,然后确认,再推进一小步。你不是在创作,你是在督工。

4 月 30 日,Simon Willison 的博客提到了 Codex CLI 0.128.0 新增的 /goal 功能。一条很短的更新,但我觉得这个变化比看起来大多了。
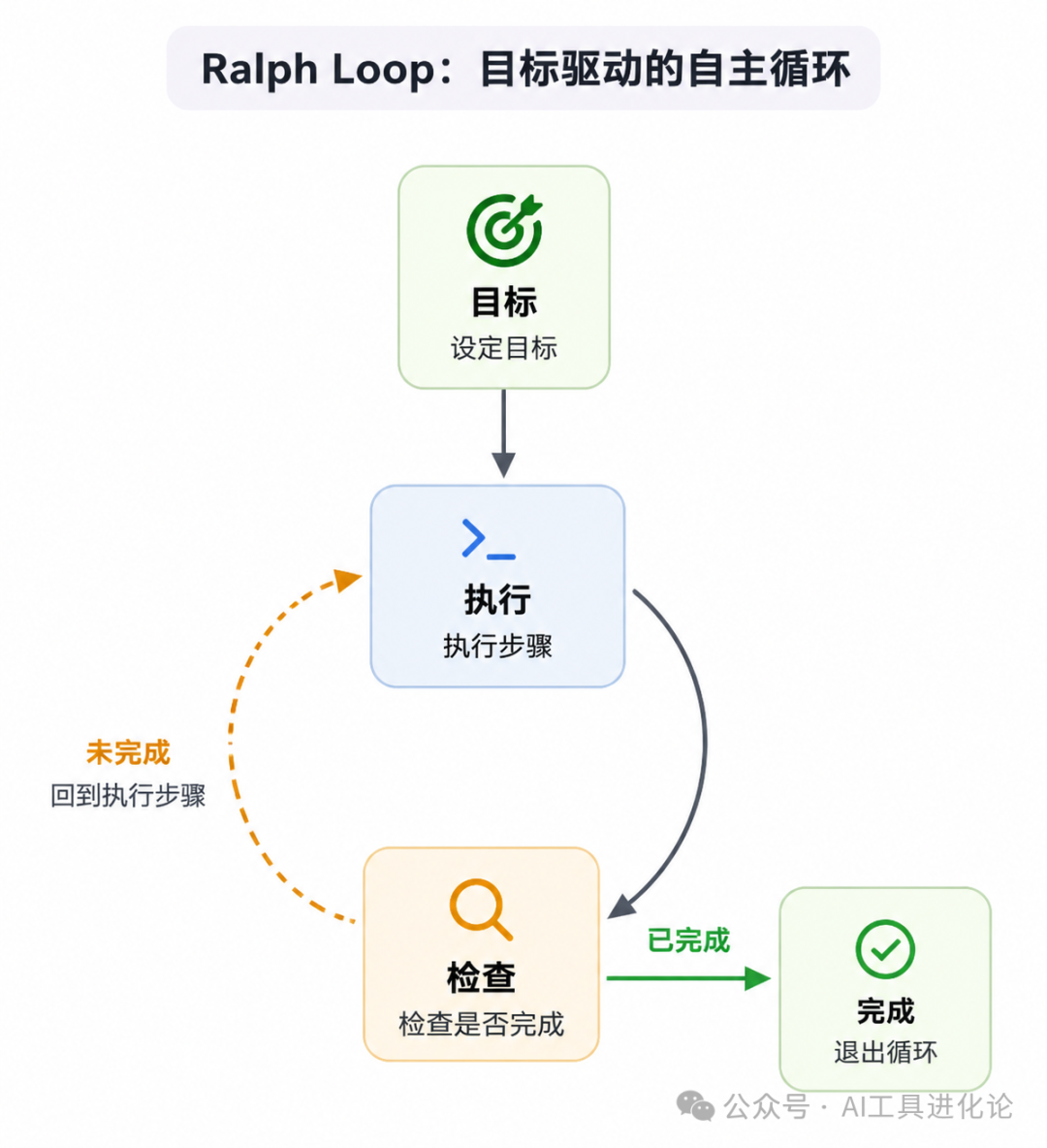
具体是什么:你设定一个 /goal,Codex 会进入一个自循环,持续评估任务有没有完成,没完成就继续往下推,直到目标达成或 token 预算耗完。
用一句话说,就是它自己会盯着目标转圈,不需要你在旁边一直催。
这个模式有个名字,叫 Ralph Loop,目标驱动的自主循环。Codex 把这个概念正式落地了。
「一问一答」和「自主完成」到底差在哪
以前的 Codex 工作模式,用「一问一答」来形容很准确。
你问,它答,交互结束。下一步怎么走,还是你决定。它是个很好用的工具,但你得把它当工具用,主动去用,不用就闲着。
某种程度上,这和搜索引擎有点像。你不问,它不说。你问什么,它答什么,不多也不少。
/goal 之后,模式变了。
你设定目标,它自己判断「当前进展到哪了」「还差什么」「接下来做什么」。这个循环它自己走,不是你推着走。
区别在哪?在于谁在「持有任务」。
以前是你在持有任务,Codex 帮你执行某个具体步骤。你是项目经理,它是执行层。每一步做完,控制权还在你手里,下一步怎么走你说了算。
现在 Codex 开始持有任务了,你退到了审核位置。它去推进,遇到决策点再来问你,或者直接按自己的判断走下去。
这不是小事。
把「持有任务」的角色交出去,需要两件事:一是 AI 要真的有能力自主判断下一步,二是你得愿意放手。第一件事,/goal 循环提供了基础能力。第二件事,需要你适应一种新的工作方式。
OpenAI 内部已经在用,PR 交付量涨了 5 倍
这不是停留在功能介绍层面的事。有数据在背后支撑。
OpenAI 内部有一套叫 Symphony 的系统,工作原理跟 /goal 循环类似,就是 Agent 自主完成任务的那种模式。他们用这套系统之后,工程团队的 PR 交付量提升了 500%。
5 倍。
这个数字我第一次看到时有点不信。500% 提升,这太夸张了。但再想想,也合理。
以前人写代码,大量时间花在「记住任务状态」「决定下一步做什么」「回去检查之前的进展」这些事情上。这些工作本身不产出代码,但占了相当多的精力。软件工程师的一大块工作,其实不是在写代码,是在管理任务状态。
如果 Agent 能自己管这个循环,工程师就只需要在关键节点做判断,实际产出量当然会往上走。
/goal 功能就是把这个逻辑带到了 Codex CLI 这个层面。
还有一个角度。以前的 AI 工具,你得搞清楚怎么问问题,才能让它给出有用的输出。「prompt engineering」这门学问就是这么来的。但循环式 Agent 不一样,它的核心不是一次性给出好答案,而是持续评估目标有没有达成,然后调整策略继续走。
这两种能力,底层逻辑其实很不一样。
用的人需要调整工作方式
如果你现在在用 Codex 做 vibe coding,/goal 值得认真试一试。
以前你可能习惯了「盯着它走」的工作方式,一步一确认,生怕它跑偏。这种习惯不是没道理,早期的 AI 编程工具确实需要这样用。跑偏了,你不知道,等发现问题,前面做的东西得全部推倒重来。
但工具在变。
自循环能力落地之后,更好的工作方式可能是:把目标定清楚,然后让它去跑,你去做别的事,等它给你一个进展报告。
当然,「token 预算耗完」这个兜底机制提醒我们,它还没到完全不用管的程度。目标拆得太大,或者任务本身没给足够的上下文,它还是会跑偏或者卡住。自循环不是无限循环,预算用完就停。

所以真正要练的技能,从「怎么催着 AI 一步步走」变成了「怎么把目标描述清楚、边界定好」。
这两件事,表面上都是「和 AI 说话」,但思维模式很不一样。前者是在管执行,后者是在定方向。
前者你得懂流程,后者你得懂目标。
把目标说清楚,其实比催着走更难。但这也是值得花时间练的地方,因为这个能力会一直有用,不管工具怎么迭代。
数据来源:
引用链接
[1] https://simonwillison.net/2026/Apr/30/codex-goals/
在 云栈社区 ,我们关注 AI 编程工具的一手变化,鼓励开发者分享实踩新功能的经验。如果你也有这类踩坑或惊喜,欢迎来聊聊你的故事。
 发表于 2026-5-3 20:43:25
|
查看: 405|
回复: 0
发表于 2026-5-3 20:43:25
|
查看: 405|
回复: 0
