这是对2025年IEEE国际图像处理会议(ICIP)上一篇论文的解读。该研究聚焦于图像元数据中通常可获取的三个相机参数——ISO、快门速度(曝光时间的倒数)和光圈值(F值),通过将这些参数转换为特征向量,并利用自适应层归一化(Adaptive Layer Normalization)将其作为条件集成到去噪网络中,从而实现对真实图像噪声的可控去除。
原论文标题:Towards Controllable Real Image Denoising with Camera Parameters
研究背景
近年来,基于人工智能的图像去噪方法取得了显著进展,各种详尽的数据集被创建出来以支持真实场景下的去噪研究。由于图像中的噪声水平会因拍摄条件不同而变化,许多方法被开发用于灵活调整去噪强度以适应不同的噪声水平。然而,传统方法通常与特定算法或网络架构紧密耦合,缺乏根据噪声水平、相机设置及用户偏好动态调整去噪强度的灵活性。
研究方法
与噪声水平相关的相机参数
来自图像传感器的噪声通常可以用异方差高斯模型来近似表示。若将无噪声原始图像的强度表示为 (x),则有噪声的原始图像 (y) 可建模为:
[
y \sim \mathcal{N}(x, \lambda{\text{read}} + \lambda{\text{shot}}x)
]
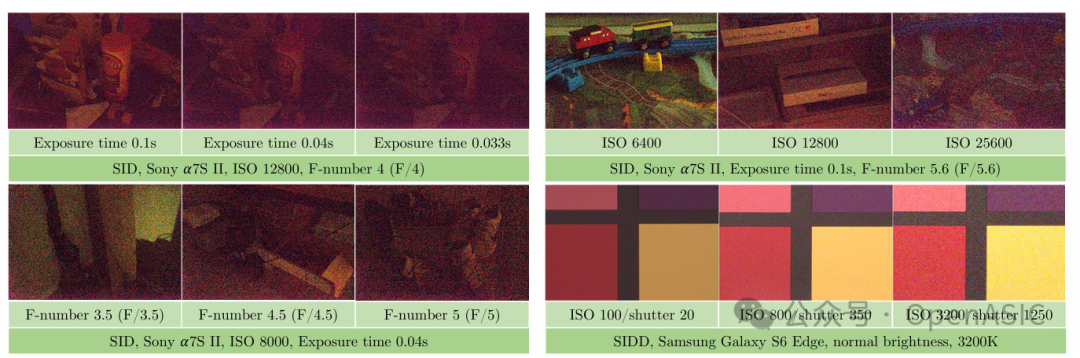
其中,参数 (\lambda{\text{read}}) 表示与信号无关的读取噪声,(\lambda{\text{shot}}) 表示与信号相关的散粒噪声。本文目标是训练一个去噪网络,能够利用特定的相机参数来有效去除噪声。基于公式(1),我们选择了与图像噪声水平 (y) 最密切相关的三个参数:ISO、快门速度和光圈F值。这些参数通常记录在图像的EXIF元数据中,它们对图像噪声的影响机理如下所述。
-
ISO感光度:ISO是决定图像噪声量的关键因素,它影响传感器增益,进而关联到噪声参数 (\lambda{\text{read}}) 和 (\lambda{\text{shot}})。提高ISO可在相同曝光下获得更快的快门或更小的光圈,但也会放大信号和噪声,导致整体噪声水平上升。
-
快门速度与光圈值:快门速度(曝光时间)和光圈F值直接影响到达传感器的光量,从而显著影响信噪比。在ISO固定时,更长的曝光时间(慢速快门)或更大的光圈(小F值)会捕捉更多光线。此时,读取噪声 (\lambda{\text{read}}) 保持恒定,而散粒噪声 (\lambda{\text{shot}}x) 会随着干净图像信号 (x) 的增加而增加,但其增长速率低于信号本身,因此总体信噪比得到提升,图像更清晰。
相机参数自适应去噪网络
本方法的核心思想是利用与噪声相关的相机参数来调节(Condition)去噪网络,并控制其去噪强度。通过在训练阶段为网络提供准确的相机参数,网络能够学习如何从具有不同噪声水平的真实图像中去除噪声。
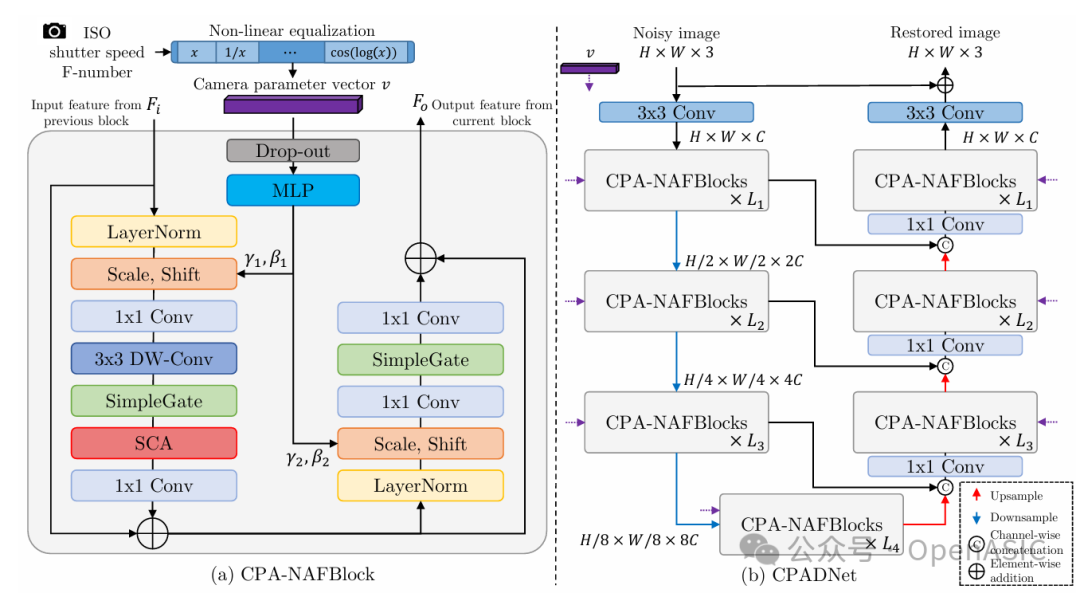
然而,实现这一想法面临挑战:相机参数的变化趋势不均匀,且对噪声水平或去噪强度的影响是非线性的。为了表征这种非线性影响,我们对每个相机参数应用一组非线性函数:(x), (1/x), (x^2), (x^{-1/2}), (x^{1/4}), (x^{-1/4}), (\log(x)), (\sin(\log(x))), (\cos(\log(x))),从而为每个参数生成一个9维向量。由于使用了三个相机参数,将这些向量拼接后,我们得到一个27维的相机参数向量 (v \in \mathbb{R}^{27}),用于表征图像的噪声水平。
为了在训练阶段将包含噪声先验知识的向量 (v) 作为条件,并在推理阶段实现网络的可控性,本方法采用了自适应层归一化(Adaptive Layer Normalization, AdaLN)。通过将相机参数向量 (v) 整合到AdaLN层中,我们可以用其生成的通道仿射参数 (\beta) 和 (\gamma) 来调节网络中每个模块。这种设计使得网络不仅能基于含噪图像本身,还能基于相机参数自适应地调整其去噪强度。
为了验证本方法能够引入可控性并提升现有去噪网络的性能,我们选择了一个鲁棒的去噪网络作为基线。具体而言,我们使用NAFNet(Nonlinear Activation Free Network)中的NAFBlocks来构建基线网络,该结构因其在各种图像复原任务中的简洁与卓越性能而闻名。网络结构如下图所示,我们构建的相机参数自适应去噪网络(CPADNet) 将原始NAFBlock中的标准层归一化替换为自适应层归一化,以便为网络提供关于噪声水平的条件信息。其中的MLP层由两个线性层组成,中间使用SiLU激活函数。在计算仿射参数之前,我们引入了概率为0.2的Dropout,以防止对某些特定参数组合产生过拟合。
实验结果
我们使用SID数据集的Sony子集和SIDD-medium数据集来训练和评估我们的方法。
去噪性能使用PSNR和SSIM指标进行衡量。此外,我们通过处理256×256大小的输入来计算MAC(乘加运算次数),并统计参数量以评估计算效率。对于SID数据集,我们使用全分辨率测试图像的非重叠块进行评估。对于SIDD数据集,我们使用其验证集和Kaggle上提供的测试集进行定量评估。定性评估则使用SID和SIDD的全分辨率图像进行。
定量结果如下表所示:

本文提出的方法(CPADNet)在PSNR和SSIM指标上均展现出了优于基线和其他对比方法的性能,这突出了我们方法的有效性。
下图展示了本方法的可控性。在推理时,我们选择了两组极端的相机参数来分别突出最弱和最强的去噪强度。如前所述,我们的网络被设计用于减少由高噪声相关参数(如高ISO)拍摄图像中的显著噪声,反之亦然。这意味着如果输入较低ISO、较慢快门速度或较大F数(小光圈)的参数,网络会施加较弱的去噪;反之,则会执行更强的去噪。
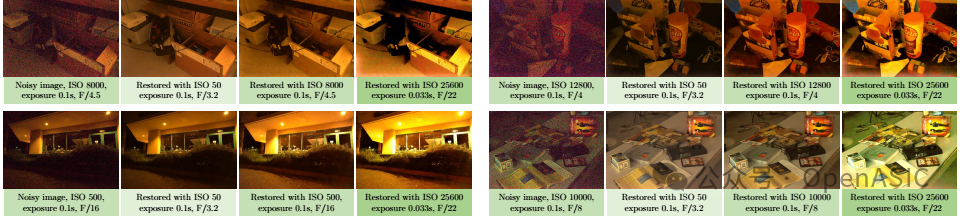
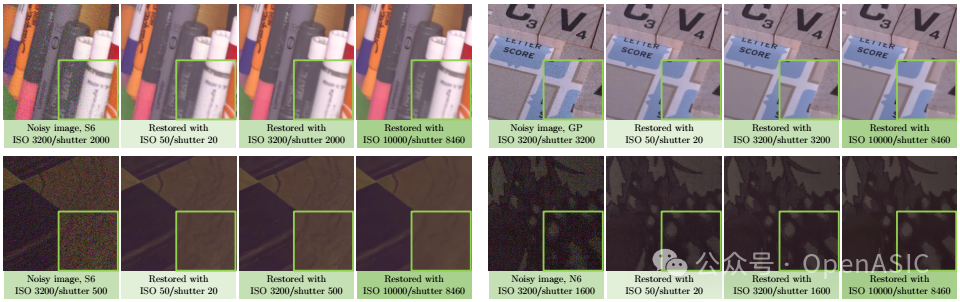
与大多数有监督深度学习方法一样,我们的方法也会受到训练数据噪声特性的影响(在本工作中即SID和SIDD的噪声特性)。然而,用户在本方法的推理过程中,有能力通过输入不同的相机参数来控制去噪器,并根据自身偏好生成恢复后的输出。
总结
本文开发了一种有效的方法,通过利用与噪声相关的相机参数来增强和控制去噪网络的性能。具体实现上,我们将相机参数编码为包含噪声水平信息的向量,并借助自适应层归一化技术将该向量赋予网络。实验表明,本方法通过利用相机参数作为先验信息,能够有效提升去噪网络的性能。此外,所提出的方法允许用户在推理阶段,通过输入相机参数作为条件,根据个人偏好灵活调整去噪强度。
 发表于 2025-12-13 00:33:40
|
查看: 238|
回复: 0
发表于 2025-12-13 00:33:40
|
查看: 238|
回复: 0
