第一章:Bootloader是什么?为什么需要它?
1.1 Bootloader的定义与历史
Bootloader,中文称为“引导加载程序”,是计算机启动时运行的第一个软件程序。它的核心任务非常明确:将操作系统内核从存储设备(如硬盘、U盘或网络)加载到内存中,随后将系统的控制权移交给内核。
回顾历史,早期的计算机并没有Bootloader的概念。工程师需要通过前面板的物理开关手动输入引导程序,过程极为繁琐。后来,人们将一段简短的引导程序固化在ROM中,计算机加电后便可自动运行,这成为了现代Bootloader的雏形。
一个有趣的事实:术语“boot”来源于“bootstrap”(鞋带),形象地比喻了计算机“靠自己拉起自己”的启动过程。
1.2 Bootloader的三大核心职责
Bootloader的核心任务可以归纳为以下三个方面:
| 职责 |
具体内容 |
生活比喻 |
| 硬件初始化 |
设置CPU工作模式、初始化内存控制器、配置时钟、使能必要的外设 |
如同音乐会前,调音师需要逐一检查并调试每件乐器 |
| 加载内核 |
从存储设备读取操作系统内核映像,并将其准确放置到内存的指定位置 |
类似于快递员将包裹从仓库准确无误地送达客户门口 |
| 环境准备 |
设置启动参数、准备设备树(Device Tree)、将CPU从实模式切换到保护模式 |
好比舞台经理在演员上场前,布置好所有场景和道具 |
1.3 为什么不能直接加载操作系统?
一个常见的问题是:既然Bootloader能加载操作系统,为什么不将操作系统直接放置在CPU上电即可执行的位置?
这个问题触及了Bootloader存在的根本原因:
- 硬件多样性:不同计算机的硬件配置(如内存大小、外设类型)各不相同,需要一个程序在启动初期进行探测和初始化。
- 存储格式:操作系统内核通常以压缩形式存储以节省空间,需要先解压才能运行。
- 灵活性:用户可能需要选择启动不同的操作系统、同一操作系统的不同内核或设置特定的启动参数。
- 安全性:现代Bootloader还承担着验证操作系统完整性与合法性的任务,例如通过安全启动(Secure Boot)机制防止恶意软件篡改。
这就像烹饪,不能直接把原始食材丢进厨房就期望得到菜肴,需要厨师(Bootloader)先行准备好厨具、处理食材,烹饪(运行操作系统)才能开始。
第二章:Bootloader的工作原理全景图
2.1 计算机启动的宏观流程
计算机从按下电源键到操作系统完全启动,经历了一个复杂的链条过程。下图展示了一个完整的启动流程全景图:
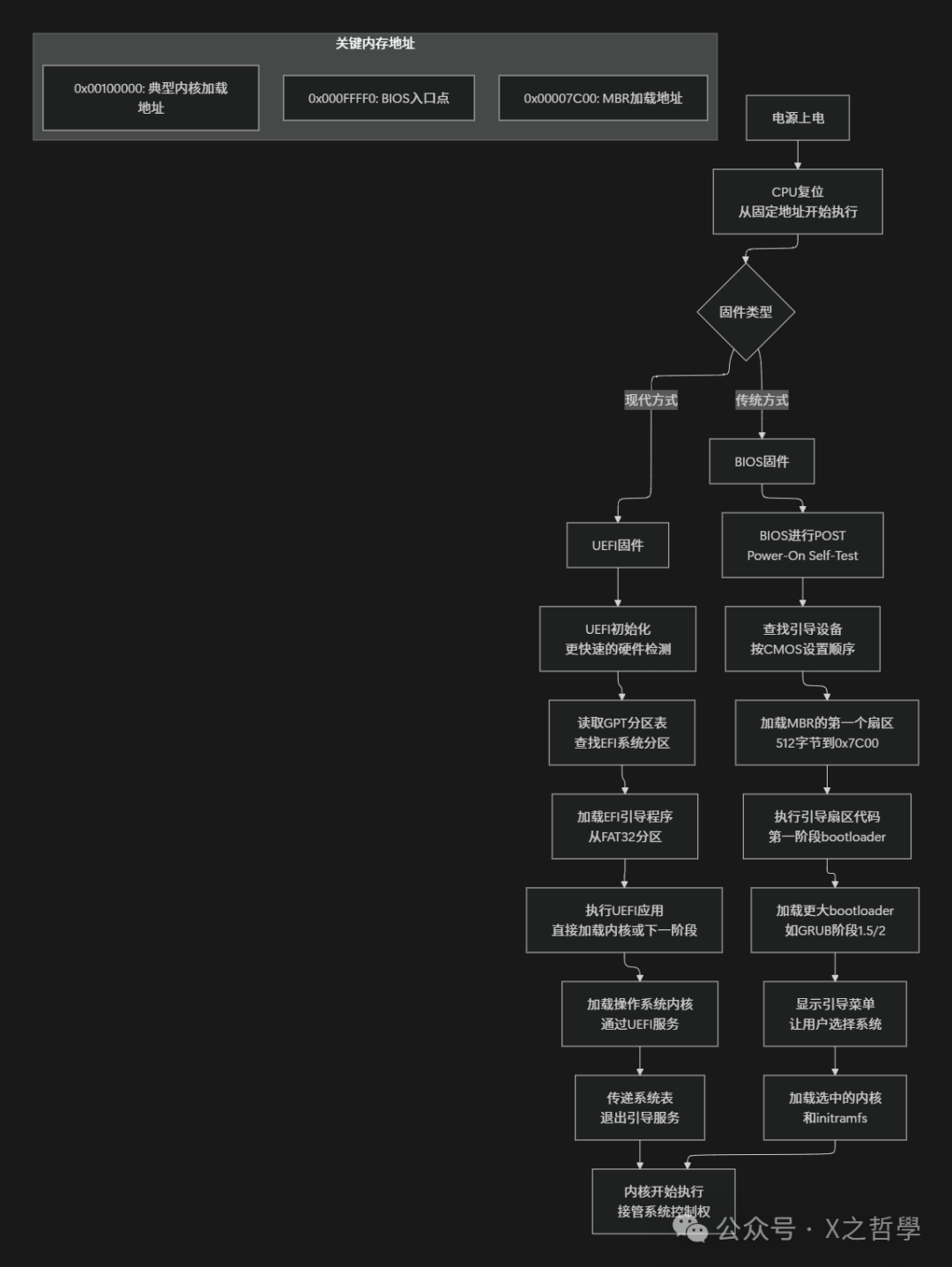
该流程图清晰展示了从硬件上电到操作系统运行的关键步骤。请注意其中的两个主要分支:传统的BIOS/MBR方式和现代的UEFI/GPT方式。本文将重点剖析传统方式,因其原理更为基础,有助于理解核心概念。
2.2 深入理解“阶段”概念
Bootloader通常采用分阶段(Stage)的设计,类似于火箭的多级推进,每一阶段完成更复杂的任务。
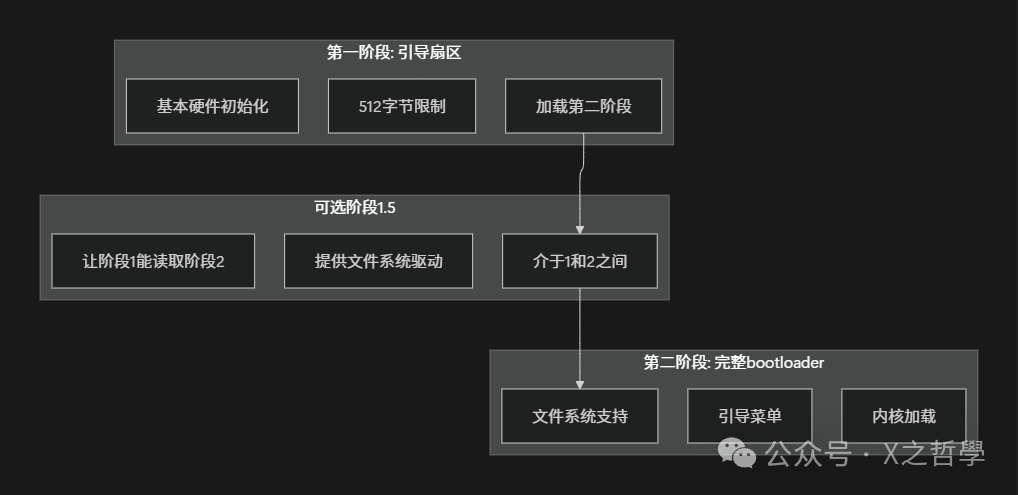
- 阶段1:通常非常小巧,因为主引导记录(MBR)只有512字节。它像侦察兵,任务极其简单明确:找到并加载体积更大的“主力部队”。
- 阶段1.5:由GRUB等Bootloader引入。由于MBR空间不足以容纳文件系统驱动程序,阶段1.5包含了基础驱动,使得阶段1能够从文件系统中定位并读取阶段2。
- 阶段2:功能完整的Bootloader主体,拥有图形或文本菜单、支持多种文件系统、能够加载不同操作系统的内核。
2.3 关键内存布局
理解内存布局对于掌握Bootloader的工作原理至关重要。下图是x86架构实模式下的典型内存布局:
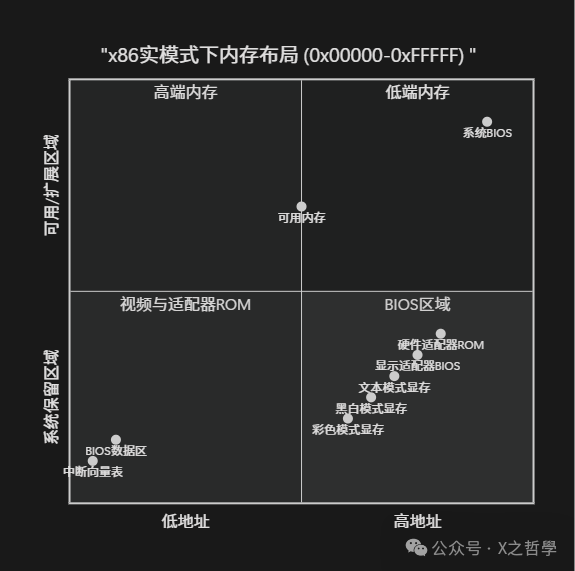
需要特别注意以下几个关键地址:
- 0x7C00:BIOS将MBR加载到此位置。这是一个历史悠久的“约定”。
- 0x90000:GRUB的Stage 2常被加载到该区域。
- 0x100000 (1MB):在保护模式下,操作系统内核通常被加载到此地址以上。
为什么是0x7C00?一个有趣的历史原因是:早期IBM PC设计时,为操作系统保留了32KB(0x0000-0x7FFF)的空间。引导程序需要放置在这段空间之后,同时又要与上方的BIOS数据区保持距离,0x7C00恰好是一个折中的安全位置。
第三章:Bootloader的实现机制详解
3.1 引导扇区:512字节的奇迹
引导扇区是磁盘的第一个扇区,大小固定为512字节。在这极其有限的空间内完成启动的初始任务,堪称编程艺术。
一个完整的MBR结构定义如下:
// MBR的数据结构定义
struct MBR {
// 第一部分:引导代码 (446字节)
uint8_t boot_code[446];
// 第二部分:分区表 (64字节,4个分区项)
struct PartitionEntry partitions[4];
// 第三部分:魔数 (2字节)
uint16_t magic; // 必须是0xAA55
};
// 分区表项结构
struct PartitionEntry {
uint8_t status; // 0x80表示可引导,0x00表示不可引导
uint8_t start_head; // 起始磁头
uint8_t start_sector; // 起始扇区 (低6位) 和柱面 (高2位)
uint8_t start_cylinder;// 起始柱面 (完整8位)
uint8_t type; // 分区类型
uint8_t end_head; // 结束磁头
uint8_t end_sector; // 结束扇区
uint8_t end_cylinder; // 结束柱面
uint32_t lba_start; // 起始LBA地址 (逻辑块地址)
uint32_t sector_count; // 扇区总数
};
实际开发中,引导扇区代码多用汇编语言编写。下面是一个最简单的“Hello World”引导扇区示例:
; boot_sector.asm - 最简单的引导扇区
; 用nasm编译: nasm -f bin boot_sector.asm -o boot.bin
BITS 16 ; 告诉汇编器生成16位代码
ORG 0x7C00 ; 告知加载器,代码将被加载到0x7C00处
start:
; 第一阶段:初始化环境
cli ; 关中断,防止在设置期间被打断
xor ax, ax ; 快速将ax清零
mov ds, ax ; 数据段寄存器=0
mov es, ax ; 附加段寄存器=0
mov ss, ax ; 堆栈段寄存器=0
mov sp, 0x7C00 ; 堆栈指针指向引导扇区开始
sti ; 重新开中断
; 第二阶段:显示消息
mov si, msg ; si指向消息字符串
call print_string ; 调用打印函数
; 第三阶段:无限循环 (实际中这里会加载下一阶段)
jmp $ ; 无限循环
; 打印字符串函数
; 输入:si指向字符串 (以0结尾)
print_string:
pusha ; 保存所有寄存器
mov ah, 0x0E ; BIOS tele-type功能号
.print_loop:
lodsb ; 从[ds:si]加载字节到al,si自增
or al, al ; 检查是否为0 (字符串结束)
jz .print_done ; 如果是0,结束
int 0x10 ; 调用BIOS视频服务显示字符
jmp .print_loop ; 继续下一个字符
.print_done:
popa ; 恢复寄存器
ret
; 数据区
msg db 'Hello from Boot Sector!', 0x0D, 0x0A, 0 ; 0x0D是回车,0x0A是换行,0是字符串结束符
; 填充到510字节
times 510-($-$$) db 0
; 最后的魔数
dw 0xAA55
这个程序虽然简单,但包含了引导扇区所有关键要素:
- 初始化段寄存器:必须正确设置,否则内存访问会出错。
- 使用BIOS中断:在实模式下,通过BIOS中断调用访问硬件服务。
- 正确填充:必须正好占满512字节,最后两个字节必须是0xAA55。
3.2 第二阶段:加载真正的Bootloader
第一阶段空间过于受限,我们需要加载更大的第二阶段程序。以下代码展示了如何从引导扇区加载第二阶段:
; 扩展的引导扇区,能加载第二阶段loader
BITS 16
ORG 0x7C00
; 常量定义
STAGE2_LOAD_SEGMENT equ 0x1000 ; 第二阶段加载到0x1000:0x0000
STAGE2_SECTOR_COUNT equ 4 ; 加载4个扇区 (2KB)
STAGE2_START_SECTOR equ 1 ; 从第2个扇区开始 (0是引导扇区)
start:
; 初始化
cli
xor ax, ax
mov ds, ax
mov es, ax
mov ss, ax
mov sp, 0x7C00
sti
; 显示加载消息
mov si, loading_msg
call print_string
; 加载第二阶段到内存
mov ax, STAGE2_LOAD_SEGMENT
mov es, ax ; es:bx指向目标缓冲区
xor bx, bx
mov ah, 0x02 ; BIOS读扇区功能
mov al, STAGE2_SECTOR_COUNT ; 扇区数
mov ch, 0 ; 柱面0
mov cl, STAGE2_START_SECTOR + 1 ; 扇区号 (从1开始)
mov dh, 0 ; 磁头0
int 0x13 ; 调用磁盘服务
jc disk_error ; 如果出错 (CF=1),跳转到错误处理
; 跳转到第二阶段
mov si, jump_msg
call print_string
jmp STAGE2_LOAD_SEGMENT:0x0000 ; 远跳转到第二阶段
disk_error:
mov si, error_msg
call print_string
jmp $
; 省略print_string函数 (同上)
loading_msg db 'Loading stage2...', 0x0D, 0x0A, 0
jump_msg db 'Jumping to stage2...', 0x0D, 0x0A, 0
error_msg db 'Disk error!', 0x0D, 0x0A, 0
times 510-($-$$) db 0
dw 0xAA55
这段代码完成了几个关键操作:
- 使用BIOS INT 0x13中断读取磁盘扇区。
- 将第二阶段程序加载到物理地址0x10000处(即段地址0x1000,偏移0x0000)。
- 包含简单的错误处理逻辑,若读盘失败则显示错误信息。
- 使用远跳转指令(
jmp segment:offset)将CPU执行权移交给第二阶段代码。
3.3 现代Bootloader的架构:以GRUB为例
GRUB(GRand Unified Bootloader)是目前Linux系统中最流行的Bootloader。其模块化架构设计非常精妙:
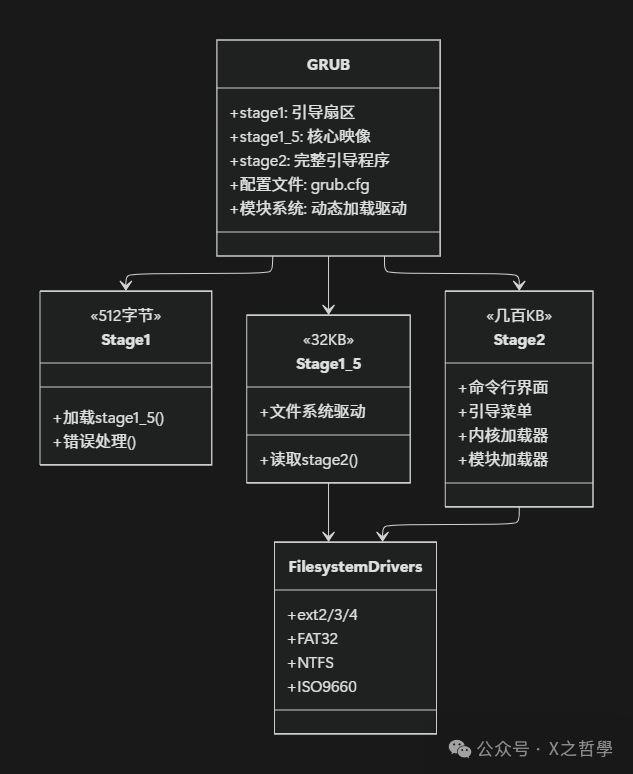
GRUB的巧妙之处在于其“阶段1.5”的设计。该阶段包含了必要的文件系统驱动(如ext2, fat),使得阶段1能够从文件系统中动态定位和加载阶段2,而无需依赖磁盘上固定的扇区位置,大大增强了灵活性。
第四章:Bootloader的核心概念与设计思想
4.1 实模式 vs 保护模式:Bootloader的“模式切换”
这是Bootloader工作中最复杂且关键的部分之一。两种模式的对比见下表:
| 特性 |
实模式 (Real Mode) |
保护模式 (Protected Mode) |
| 内存访问 |
直接物理地址,20位地址线(最大1MB) |
通过段描述符间接访问,支持32/64位地址(4GB以上) |
| 特权级 |
无,所有代码拥有完全控制权 |
4个特权级(Ring 0-3),内核运行在最高特权级Ring 0 |
| 分段机制 |
段寄存器值×16 + 偏移量 |
通过全局描述符表(GDT)和选择子 |
| 适用阶段 |
BIOS阶段,Bootloader初始阶段 |
现代操作系统运行环境 |
| 比喻 |
平房,可以直接走到任何房间 |
高层公寓,需要门禁卡和电梯权限 |
Bootloader的一个关键任务就是完成从实模式到保护模式的切换。其基本流程如下图所示:
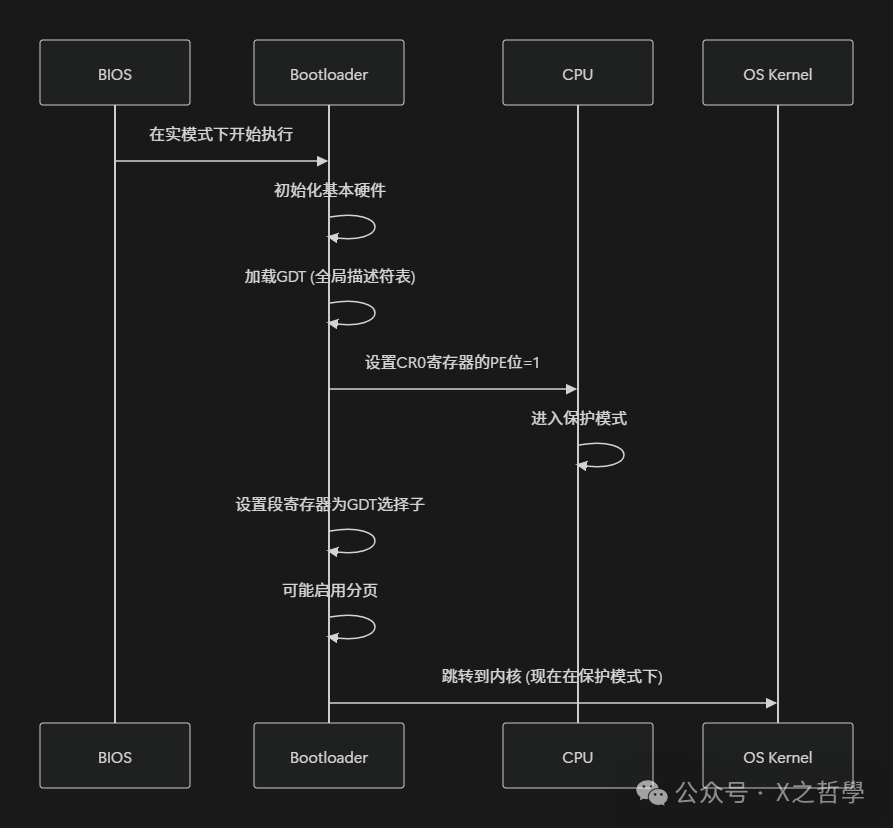
在代码层面,模式切换主要包含以下步骤:
; 切换到保护模式的关键代码片段
switch_to_protected_mode:
; 1. 关中断
cli
; 2. 加载全局描述符表(GDT)描述符
lgdt [gdt_descriptor]
; 3. 设置CR0寄存器的PE位(保护模式使能位)
mov eax, cr0
or eax, 0x1
mov cr0, eax
; 4. 远跳转以清空CPU的指令预取流水线
jmp CODE_SEG:init_pm
[BITS 32]
init_pm:
; 5. 设置保护模式下的段寄存器(数据段选择子)
mov ax, DATA_SEG
mov ds, ax
mov ss, ax
mov es, ax
mov fs, ax
mov gs, ax
; 6. 设置堆栈指针
mov ebp, 0x90000
mov esp, ebp
; 现在已在32位保护模式下运行!
call protected_mode_main
4.2 引导协议:Bootloader与内核的约定
Bootloader和操作系统内核之间需要遵循一套“对话协议”。对于Linux内核而言,这被称为“Linux启动协议”。Bootloader需要将启动信息放置在约定好的内存位置(例如实模式下的0x90000),供内核读取。关键信息结构简化如下:
// 简化的启动参数结构
struct boot_params {
uint8_t setup_sects; // 设置扇区数
uint16_t root_flags; // 根文件系统标志
uint32_t syssize; // 系统大小(以16字节为单位)
uint16_t ram_size; // 内存大小(KB)
uint16_t vid_mode; // 视频模式
uint16_t root_dev; // 根设备号
uint16_t boot_flag; // 引导标志 (必须为0xAA55)
// ... 更多字段
char cmdline[256]; // 内核命令行参数
};
4.3 安全引导:现代Bootloader的必修课
随着安全威胁日益增加,现代Bootloader必须支持安全引导机制。以UEFI的Secure Boot为例,其验证流程形成了一个完整的信任链:

这种链条式的验证确保了从固件到Bootloader,再到操作系统内核的每一个环节都经过数字签名验证,有效防止了恶意软件在系统启动早期取得控制权。
第五章:动手实践:编写一个最小Bootloader
理论分析之后,我们动手实践,编写一个能够实际运行的微型Bootloader。它将完成以下任务:
- 在实模式下启动并初始化环境。
- 从磁盘加载一个简单的内核到内存。
- 从16位实模式切换到32位保护模式。
- 跳转到内核的入口点并执行。
5.1 项目结构
simple_bootloader/
├── boot.asm # 引导扇区代码
├── kernel.c # 简单内核(C语言)
├── linker.ld # 内核链接脚本
├── Makefile # 构建脚本
└── run.sh # 运行脚本(使用QEMU)
5.2 引导扇区实现 (boot.asm)
; ====================
; 简单Bootloader - 引导扇区
; ====================
[bits 16]
[org 0x7C00]
; 常量定义
KERNEL_LOAD_SEGMENT equ 0x1000
KERNEL_SECTOR_START equ 1
KERNEL_SECTOR_COUNT equ 10
start:
; 初始化段寄存器
xor ax, ax
mov ds, ax
mov es, ax
mov ss, ax
mov sp, 0x7C00
; 保存引导驱动器号(BIOS传递在dl中)
mov [boot_drive], dl
; 显示启动消息
mov si, msg_loading
call print_string
; 加载内核到内存
mov bx, KERNEL_LOAD_SEGMENT
mov es, bx
xor bx, bx
mov dh, KERNEL_SECTOR_COUNT ; 扇区数
mov cl, KERNEL_SECTOR_START + 1 ; 起始扇区
mov dl, [boot_drive] ; 驱动器号
call disk_load
; 切换到保护模式
call switch_to_pm
; 这里不会返回
jmp $
; --------------------------
; 磁盘加载函数
; 输入:es:bx = 目标缓冲区
; dh = 扇区数
; cl = 起始扇区
; dl = 驱动器号
; --------------------------
disk_load:
pusha
push dx
mov ah, 0x02 ; BIOS读扇区功能
mov al, dh ; 扇区数
mov ch, 0 ; 柱面0
mov dh, 0 ; 磁头0
; cl已经设置好了(起始扇区)
int 0x13
jc disk_error ; 如果CF=1,出错
pop dx
cmp al, dh ; 检查实际读取的扇区数是否与预期相符
jne disk_error
popa
ret
disk_error:
mov si, msg_disk_error
call print_string
jmp $
; --------------------------
; 打印字符串函数(实模式)
; 输入:si = 字符串地址
; --------------------------
print_string:
pusha
mov ah, 0x0E
.print_loop:
lodsb
test al, al
jz .print_done
int 0x10
jmp .print_loop
.print_done:
popa
ret
; --------------------------
; GDT定义(全局描述符表)
; --------------------------
gdt_start:
; 空描述符(必须存在)
dq 0x0
; 代码段描述符
gdt_code:
dw 0xFFFF ; 段限长低16位
dw 0x0 ; 段基址低16位
db 0x0 ; 段基址中间8位
db 10011010b ; 访问字节:PRESENT=1, DPL=00, 代码段,可执行,可读
db 11001111b ; 标志位 + 段限长高4位:G=1(4KB粒度),D/B=1(32位),L=0,AVL=0
db 0x0 ; 段基址高8位
; 数据段描述符
gdt_data:
dw 0xFFFF
dw 0x0
db 0x0
db 10010010b ; 数据段,不可执行,可读写
db 11001111b
db 0x0
gdt_end:
; GDT描述符(供lgdt指令使用)
gdt_descriptor:
dw gdt_end - gdt_start - 1 ; GDT大小
dd gdt_start ; GDT起始地址
; 常量用于段选择子
CODE_SEG equ gdt_code - gdt_start
DATA_SEG equ gdt_data - gdt_start
; --------------------------
; 切换到保护模式
; --------------------------
switch_to_pm:
cli
lgdt [gdt_descriptor]
; 设置CR0的PE位(第0位)
mov eax, cr0
or eax, 0x1
mov cr0, eax
; 远跳转以清空流水线并进入32位代码段
jmp CODE_SEG:init_pm
[bits 32]
; --------------------------
; 保护模式初始化
; --------------------------
init_pm:
; 设置段寄存器(数据段选择子)
mov ax, DATA_SEG
mov ds, ax
mov ss, ax
mov es, ax
mov fs, ax
mov gs, ax
; 设置堆栈
mov ebp, 0x90000
mov esp, ebp
; 跳转到内核入口点(物理地址 = 段值 × 16)
call KERNEL_LOAD_SEGMENT * 0x10
; --------------------------
; 数据区
; --------------------------
boot_drive db 0
msg_loading db "Booting simple OS...", 0x0D, 0x0A, 0
msg_disk_error db "Disk read error!", 0x0D, 0x0A, 0
; --------------------------
; 填充引导扇区
; --------------------------
times 510-($-$$) db 0
dw 0xAA55
5.3 简单内核实现 (kernel.c)
// ====================
// 简单内核
// ====================
// VGA文本模式缓冲区地址
#define VGA_BUFFER 0xB8000
// VGA颜色常量
enum vga_color {
BLACK = 0,
BLUE = 1,
GREEN = 2,
CYAN = 3,
RED = 4,
MAGENTA = 5,
BROWN = 6,
LIGHT_GRAY = 7,
DARK_GRAY = 8,
LIGHT_BLUE = 9,
LIGHT_GREEN = 10,
LIGHT_CYAN = 11,
LIGHT_RED = 12,
LIGHT_MAGENTA = 13,
YELLOW = 14,
WHITE = 15
};
// 计算VGA颜色字节
static inline uint8_t vga_entry_color(enum vga_color fg, enum vga_color bg) {
return fg | (bg << 4);
}
// 计算VGA字符条目
static inline uint16_t vga_entry(unsigned char ch, uint8_t color) {
return (uint16_t)ch | ((uint16_t)color << 8);
}
// 清屏
void clear_screen(uint8_t color) {
uint16_t* vga = (uint16_t*)VGA_BUFFER;
for (size_t i = 0; i < 80 * 25; i++) {
vga[i] = vga_entry(' ', color);
}
}
// 在指定位置打印字符
void put_char_at(char ch, uint8_t color, size_t x, size_t y) {
uint16_t* vga = (uint16_t*)VGA_BUFFER;
vga[y * 80 + x] = vga_entry(ch, color);
}
// 打印字符串
void print_string(const char* str, uint8_t color) {
static size_t x = 0, y = 0;
for (size_t i = 0; str[i] != '\0'; i++) {
if (str[i] == '\n') {
x = 0;
y++;
} else {
put_char_at(str[i], color, x, y);
x++;
if (x >= 80) {
x = 0;
y++;
}
}
if (y >= 25) {
// 简单滚屏:将所有行向上移动一行
uint16_t* vga = (uint16_t*)VGA_BUFFER;
for (size_t line = 0; line < 24; line++) {
for (size_t col = 0; col < 80; col++) {
vga[line * 80 + col] = vga[(line + 1) * 80 + col];
}
}
// 清空最后一行
for (size_t col = 0; col < 80; col++) {
vga[24 * 80 + col] = vga_entry(' ', color);
}
y = 24;
}
}
}
// 内核主函数
void kernel_main(void) {
clear_screen(vga_entry_color(BLACK, LIGHT_GRAY));
print_string("========================================\n",
vga_entry_color(BLUE, LIGHT_GRAY));
print_string(" Simple OS Kernel Booted Successfully!\n",
vga_entry_color(GREEN, LIGHT_GRAY));
print_string("========================================\n\n",
vga_entry_color(BLUE, LIGHT_GRAY));
print_string("System Information:\n",
vga_entry_color(WHITE, LIGHT_GRAY));
print_string(" - Running in 32-bit protected mode\n",
vga_entry_color(LIGHT_GRAY, LIGHT_GRAY));
print_string(" - VGA text mode: 80x25\n",
vga_entry_color(LIGHT_GRAY, LIGHT_GRAY));
print_string(" - Kernel loaded at 0x10000\n\n",
vga_entry_color(LIGHT_GRAY, LIGHT_GRAY));
print_string("Congratulations! You've just booted a custom OS.\n",
vga_entry_color(YELLOW, LIGHT_GRAY));
// 无限循环
while (1) {
// 此处可添加更多功能
}
}
5.4 链接脚本 (linker.ld)
/* 内核链接脚本 */
ENTRY(kernel_main)
SECTIONS {
/* 内核加载地址(物理地址0x10000) */
. = 0x10000;
.text : {
*(.text)
}
.rodata : {
*(.rodata)
}
.data : {
*(.data)
}
.bss : {
*(COMMON)
*(.bss)
}
}
5.5 Makefile
# Makefile for simple bootloader
ASM=nasm
CC=gcc
LD=ld
QEMU=qemu-system-x86_64
CFLAGS=-m32 -nostdlib -nostdinc -fno-builtin -fno-stack-protector -nostartfiles -nodefaultlibs -Wall -Wextra -c
LDFLAGS=-m elf_i386 -T linker.ld
all: boot.bin kernel.bin os.img
boot.bin: boot.asm
$(ASM) -f bin boot.asm -o boot.bin
kernel.o: kernel.c
$(CC) $(CFLAGS) kernel.c -o kernel.o
kernel.bin: kernel.o linker.ld
$(LD) $(LDFLAGS) kernel.o -o kernel.bin
os.img: boot.bin kernel.bin
dd if=/dev/zero of=os.img bs=512 count=2880
dd if=boot.bin of=os.img conv=notrunc
dd if=kernel.bin of=os.img bs=512 seek=1 conv=notrunc
run: os.img
$(QEMU) -drive format=raw,file=os.img,index=0,if=floppy
debug: os.img
$(QEMU) -S -gdb tcp::1234 -drive format=raw,file=os.img,index=0,if=floppy &
gdb -ex "target remote localhost:1234" -ex "symbol-file kernel.bin"
clean:
rm -f *.bin *.o *.img
.PHONY: all run debug clean
5.6 运行与测试
- 编译:在项目目录下执行
make。
- 运行:执行
make run,将在QEMU中启动自制系统。
- 调试:执行
make debug(需在一个终端运行QEMU,另一个终端连接GDB)。
如果一切正常,QEMU窗口将显示如下内容:
Booting simple OS...
========================================
Simple OS Kernel Booted Successfully!
========================================
System Information:
- Running in 32-bit protected mode
- VGA text mode: 80x25
- Kernel loaded at 0x10000
Congratulations! You've just booted a custom OS.
第六章:Bootloader调试技巧与工具
调试运行在系统最底层的Bootloader具有挑战性,掌握正确的工具和方法至关重要。
6.1 常用调试工具
| 工具 |
用途 |
示例命令 |
| QEMU |
虚拟机,Bootloader开发利器 |
qemu-system-x86_64 -drive file=os.img,format=raw |
| GDB |
调试器,配合QEMU使用 |
target remote localhost:1234 |
| NASM |
汇编编译器 |
nasm -f bin boot.asm -o boot.bin |
| objdump |
反汇编工具 |
objdump -D -b binary -m i8086 boot.bin |
| hexdump |
查看二进制文件 |
hexdump -C boot.bin |
| dd |
磁盘映像操作 |
dd if=boot.bin of=disk.img conv=notrunc |
6.2 调试实战:添加调试输出
在Bootloader中嵌入调试信息是定位问题的有效手段。以下是一个常用的十六进制值打印函数:
; 调试输出函数 - 打印16进制值
; 输入:ax = 要打印的值
print_hex:
pusha
mov cx, 4 ; 4个十六进制数字
.hex_loop:
rol ax, 4 ; 循环左移4位,把最高4位移到最低
mov bx, ax
and bx, 0x0F ; 取最低4位
mov bl, [hex_chars + bx]
mov ah, 0x0E
mov al, bl
int 0x10
loop .hex_loop
; 打印空格分隔
mov ah, 0x0E
mov al, ' '
int 0x10
popa
ret
hex_chars db '0123456789ABCDEF'
使用示例:
; 在关键位置添加调试输出
mov si, debug_msg1
call print_string
mov ax, [boot_drive]
call print_hex ; 打印引导驱动器号
6.3 QEMU+GDB调试Bootloader完整流程
-
启动QEMU并等待GDB连接:
qemu-system-x86_64 -S -s -drive format=raw,file=os.img,index=0,if=floppy
-S:启动时暂停CPU。-s:在1234端口监听GDB连接。
-
启动GDB并连接:
gdb
(gdb) target remote localhost:1234
(gdb) set architecture i8086 # 对于实模式代码
(gdb) break *0x7C00 # 在引导扇区入口设置断点
(gdb) continue
-
常用GDB命令:
(gdb) info registers # 查看所有寄存器值
(gdb) x/10i $pc # 查看当前指令附近10条指令
(gdb) x/16xb 0x7C00 # 以十六进制查看内存内容
(gdb) stepi # 单步执行一条指令
(gdb) nexti # 单步执行(跳过函数调用)
(gdb) break *0x7E00 # 在指定地址设断点
(gdb) watch *0x60000 # 监视内存地址的写操作
6.4 串口调试:嵌入式系统必备
在真实的嵌入式硬件上,可能没有显示输出。此时,串口调试成为关键手段。
; 串口初始化 (COM1, 115200 baud)
init_serial:
mov dx, 0x3F8 + 3 ; 线路控制寄存器
mov al, 0x80 ; 允许设置波特率
out dx, al
mov dx, 0x3F8 + 0 ; 除数锁存低字节
mov al, 0x01 ; 115200 baud
out dx, al
mov dx, 0x3F8 + 1 ; 除数锁存高字节
mov al, 0x00
out dx, al
mov dx, 0x3F8 + 3
mov al, 0x03 ; 8位数据,无校验,1停止位
out dx, al
ret
; 串口输出字符
serial_putc:
push dx
push ax
mov dx, 0x3F8 + 5 ; 线路状态寄存器
.wait:
in al, dx
test al, 0x20 ; 测试发送保持寄存器空位
jz .wait
pop ax
mov dx, 0x3F8 ; 发送保持寄存器
out dx, al
pop dx
ret
在宿主机上,可以使用minicom或screen监听串口:
screen /dev/ttyUSB0 115200
第七章:现代Bootloader高级话题
7.1 UEFI vs BIOS:一场革命
UEFI(统一可扩展固件接口)正逐步取代传统的BIOS。两者的主要区别如下图所示:
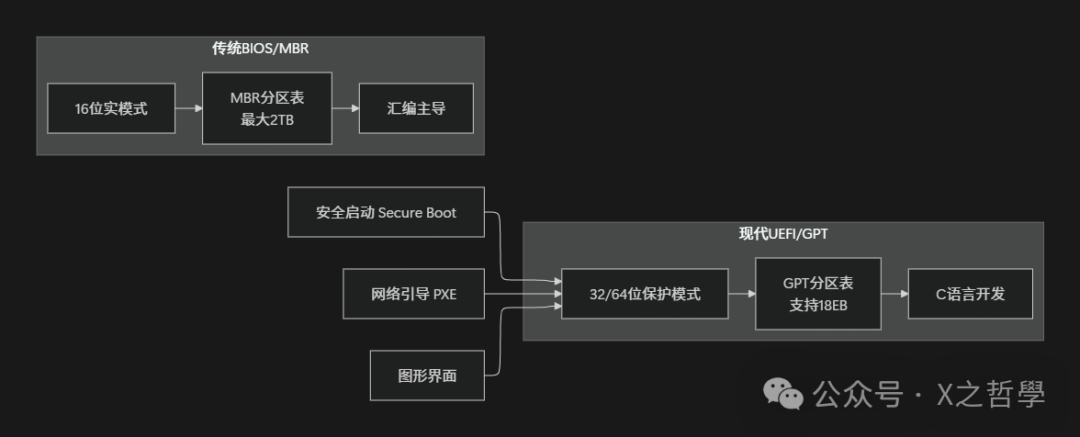
具体对比如下:
| 特性 |
BIOS |
UEFI |
| 程序模式 |
16位实模式 |
32/64位保护模式 |
| 分区方案 |
MBR(主引导记录)
- 最大4个主分区
- 最大2TB磁盘 |
GPT(GUID分区表)
- 最多128个分区
- 最大18EB磁盘 |
| 开发语言 |
主要是汇编 |
C语言为主 |
| 启动速度 |
较慢(需完整POST) |
较快(支持并行初始化) |
| 安全功能 |
基本无 |
Secure Boot,数字签名 |
| 用户界面 |
文本模式 |
图形化,支持鼠标 |
| 网络支持 |
有限(需PXE扩展) |
原生网络协议栈支持 |
7.2 多系统引导的实现
像GRUB这样的Bootloader如何管理多个操作系统?其核心在于链式加载机制和菜单配置。
// 简化的引导菜单项结构
struct boot_menu_entry {
char name[32]; // 显示名称
enum os_type type; // 操作系统类型
union {
struct {
uint32_t kernel_sector; // Linux内核位置
uint32_t initrd_sector; // 初始RAM磁盘
char cmdline[256]; // 内核参数
} linux_info;
struct {
uint32_t boot_sector; // Windows引导扇区
} windows_info;
// ... 其他系统类型
};
struct boot_menu_entry* next; // 链表下一项
};
引导流程:
- 读取配置文件(如
grub.cfg)。
- 显示图形或文本菜单供用户选择。
- 根据选择,加载对应操作系统的引导扇区或内核文件。
- 传递控制权并启动选中的系统。
7.3 网络引导 (PXE)
网络引导允许计算机从网络服务器启动,常用于无盘工作站或系统部署。其基本流程如下:
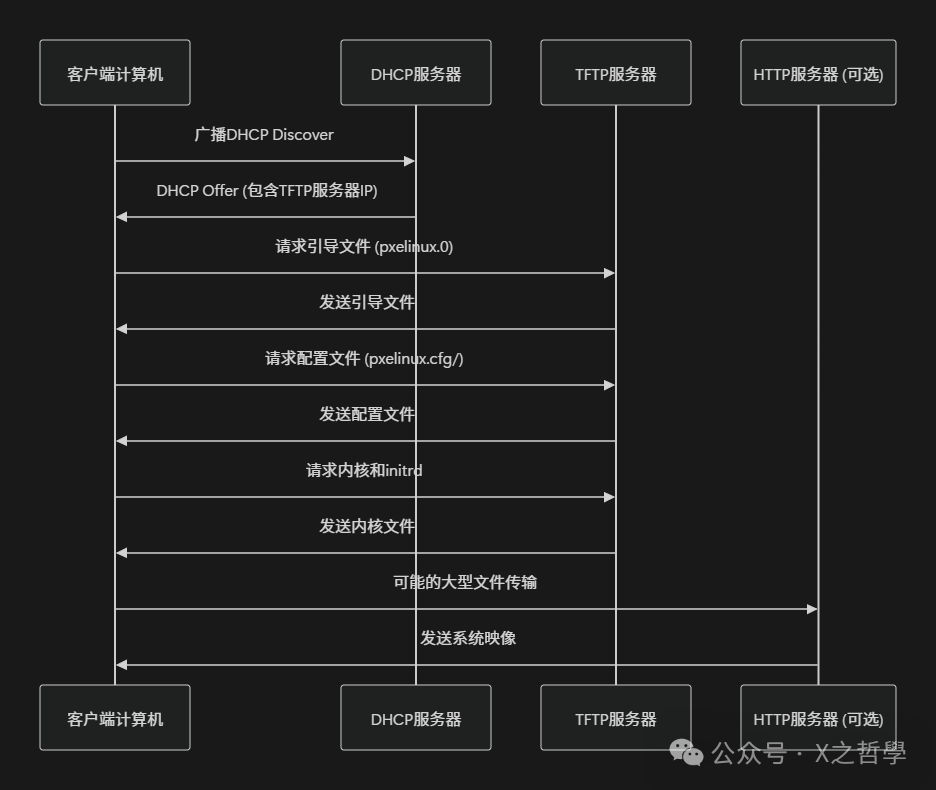
关键协议包括:
- DHCP:动态主机配置协议,为客户端分配IP地址并告知引导服务器位置。
- TFTP:简单文件传输协议,用于传输Bootloader等小文件。
- HTTP:用于传输较大的系统镜像文件。
第八章:Bootloader设计的最佳实践
根据实践经验,设计一个健壮、高效的Bootloader应遵循以下原则:
8.1 简洁性原则
引导扇区仅512字节,必须精打细算。优化技巧包括:
- 使用短指令(如
xor ax, ax代替mov ax, 0)。
- 将公共操作封装为函数以便重用。
- 对于后续阶段,可考虑使用压缩算法,在内存中解压执行。
8.2 健壮性原则
Bootloader必须具备良好的错误处理能力,以应对各种异常情况。
; 健壮的磁盘读取函数(带重试机制)
safe_disk_read:
pusha
mov si, 3 ; 重试3次
.retry:
pusha
mov ah, 0x02
int 0x13
jnc .success ; 成功则跳转
; 失败处理
popa
dec si
jz .failure ; 重试次数用尽
; 重置磁盘驱动器
mov ah, 0x00
int 0x13
jmp .retry
.success:
popa
popa
ret
.failure:
mov si, disk_fail_msg
call print_string
jmp $ ; 无限循环(或尝试其他启动路径)
8.3 可移植性原则
优秀的Bootloader应能支持多种硬件架构。采用硬件抽象层(HAL)设计是良好的实践。
// 硬件抽象层接口定义
struct hal_operations {
void (*serial_init)(void);
void (*serial_putc)(char c);
void (*disk_read)(uint32_t lba, void* buffer);
void (*video_clear)(void);
void (*video_puts)(const char* str);
};
// 平台特定实现
#ifdef X86_BIOS
struct hal_operations bios_hal = {
.serial_init = bios_serial_init,
.serial_putc = bios_serial_putc,
.disk_read = bios_disk_read,
.video_clear = bios_video_clear,
.video_puts = bios_video_puts
};
#endif
#ifdef ARM_UEFI
struct hal_operations uefi_hal = {
.serial_init = uefi_serial_init,
.serial_putc = uefi_serial_putc,
.disk_read = uefi_disk_read,
.video_clear = uefi_video_clear,
.video_puts = uefi_video_puts
};
#endif
8.4 安全性原则
现代Bootloader必须将安全性纳入设计考量:
- 镜像验证:通过哈希或数字签名检查内核映像是否被篡改。
- 安全启动:只加载和执行经过可信方签名的代码。
- 内存保护:在可能的情况下,启用内存保护机制以防止栈溢出等攻击。
- 日志审计:记录引导过程中的关键事件,便于安全分析。
总结与展望
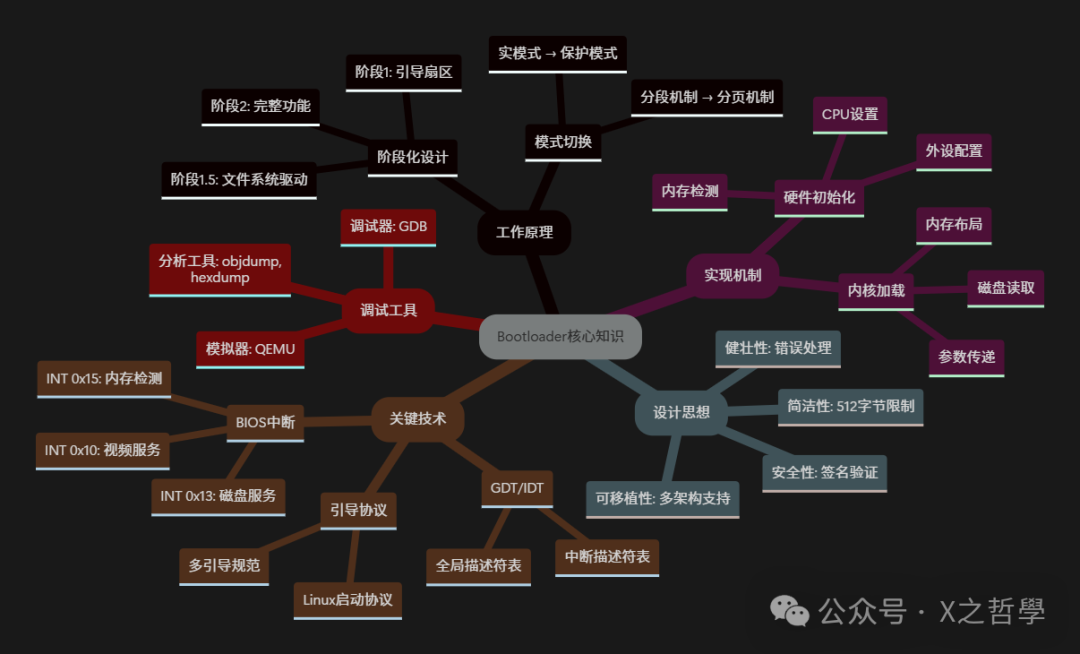
全文梳理
本文系统性地剖析了Bootloader的方方面面。以下总图回顾了其核心工作流程与关键概念:
关键要点总结
- Bootloader是系统的起点:作为硬件与软件之间的桥梁,它负责将操作系统从存储设备加载到内存,并初始化必要的硬件环境。
- 阶段化设计是核心:从512字节的引导扇区开始,逐步加载更复杂的代码,这种“由小到大”的引导策略是应对存储限制和增加灵活性的精髓。
- 模式切换是关键难点:从16位实模式到32/64位保护模式的切换,涉及GDT设置和CPU控制寄存器操作,是Bootloader开发中的核心挑战之一。
- 健壮性至关重要:作为系统启动的第一道防线,Bootloader必须具备完善的错误检测与处理机制。
- 安全是现代基本需求:Secure Boot等安全引导机制确保了引导链的可信性,是防御底层恶意软件的关键。
随着技术的发展,Bootloader也在不断演进,例如UEFI正在取代传统BIOS,安全启动成为标配,网络引导和容器化启动等新场景也在不断涌现。深入理解Bootloader的原理与实践,不仅是操作系统开发者的必修课,也对系统工程师、安全研究员和嵌入式开发者具有重要价值。
 发表于 2025-12-14 13:28:51
|
查看: 201|
回复: 0
发表于 2025-12-14 13:28:51
|
查看: 201|
回复: 0
