本帖最后由 贝塔零点一 于 2026-3-9 17:35 编辑
如果说 ImageNet 的出现开启了计算机视觉的黄金时代,那么在空间智能领域,我们也终于等来了一个填补空白的里程碑式开源项目。
如视宣布,面向学术研究及非商业用途正式开放 10,000 套室内三维数据集 Realsee3D——这被认为是目前全球最大规模的开源室内三维数据集,旨在为空间智能领域的研究者、开发者提供高质量数据基础,加速整个行业的技术迭代与应用落地。
此前,如视发布了空间深度推测大模型Argus1.0。作为首个支持全景图输入的空间深度推测大模型,Argus1.0依托如视所积累的千万级三维空间数据库训练而成。而此次开放的 Realsee3D 三维数据集,正是从这一海量数据库中精选出的高质量样本。

数据集核心优势
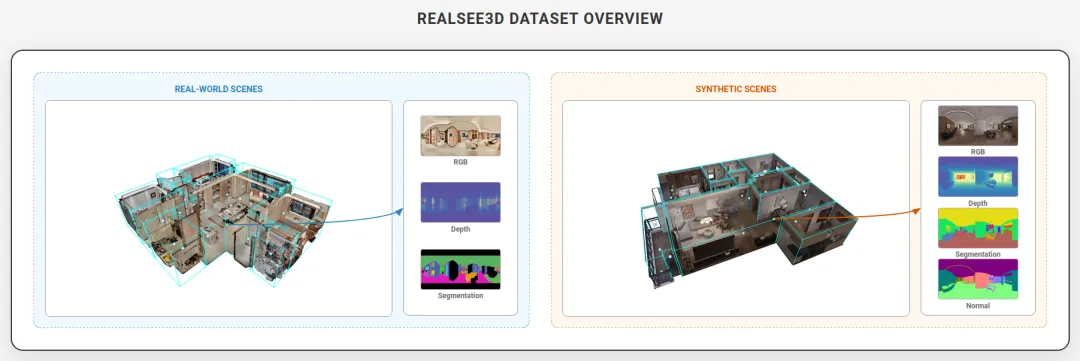
Realsee3D 是一个大规模多视角RGB-D数据集,旨在推动室内三维感知、重建与场景理解领域的研究。该数据集具有以下突出优势:
1. 超大规模
- 包含 10,000 个独特的室内三维场景
- 细分为 95,962 个房间单元
- 提供 299,073 组视点/RGB-D 图像对
2. 完备标注
数据集为支持多任务学习提供了详尽的真值标注,覆盖视觉、几何与语义多个层面:
- 几何层:提供高精度 CAD 图纸与平面图。
- 语义层:包含 2D 语义分割与 3D 物体检测标签。
3. 场景多样
为确保模型在复杂现实环境中的鲁棒性,数据集采用了“真实数据 + 程序化生成”的双重构建策略:
- 采集数据:包含 1,000 个真实场景,捕捉了现实世界复杂的物理光照、空间布局与生活痕迹。
- 合成数据:包含 9,000 个合成场景,基于超过 100 位专业设计师精心搭配的风格模板生成,涵盖了海量的家具模型与多样的装修风格。

包含的数据类型
- 彩色全景图
- 深度图
- 位姿(相机参数)
- CAD图纸
- 户型平面图
- 语义分割标签
- 3D物体检测标签

彩色全景图示例
深度图示例
表面法线示例
语义分割图示例
适用研究方向
一直以来,高质量空间数据的匮乏是制约空间智能领域发展与应用的瓶颈。如视此次开源 Realsee3D 数据集,正旨在填补这一关键缺口。
该数据集非常适用于以下核心研究方向:
- 几何重建:如三维场景重建、深度估计、平面结构恢复。
- 多模态学习:结合图像、深度、几何与语义信息进行联合学习。
- 具身智能:为机器人或智能体在室内环境中的导航、交互与理解提供仿真与训练数据。
获取方式
Realsee3D 数据集已通过官方 GitHub 仓库开放申请,研究者与开发者可以访问以下地址获取详细信息和申请流程:
https://github.com/realsee-developer/RealSee3D |  发表于 2025-12-17 22:39:02
|
查看: 179|
回复: 0
发表于 2025-12-17 22:39:02
|
查看: 179|
回复: 0
