在制造业车间,数控机床突然停机一小时,可能意味着数万元的产能损失。而在实际维护工作中,工厂常常面临一个两难困境:要么传感器数据残缺,无法准确判断设备状态;要么只能采取固定周期的“一刀切”式维护方案——结果往往是健康设备被过度维修,白花了钱,而已经退化的设备却被漏检,最终导致故障发生。
有没有一种方法,能在数据不全的情况下,依然做出精准且经济的维修决策呢?一篇学术论文提出,可以利用部分可观察马尔可夫决策过程(Partially Observable Markov Decision Process, POMDP) 来解决这一困局。该方法无需依赖完整的数据流,就能较为精准地评估数控机床的多状态退化过程,并输出一套追求长期“成本最优”的动态维护策略。在一个针对气缸数控机床的验证案例中,该方法成功地将故障停机时间缩短了40%,并将总维护成本降低了30%以上。
一、痛点:传统数控机床维护的三大难题
传统维护策略之所以频频失效,其根源在于未能妥善解决工厂实际运营中的几大核心矛盾:
- 状态“看不清”:数控机床的退化是一个连续的过程,而传统的“健康/故障”二分法显得过于粗糙。例如,“主轴轻微磨损”这种处于中间状态的情况,既不完全算作故障,又需要引起关注,却常常被传统方法忽略。
- 数据“抓不全”:受限于传感器预算或车间复杂的电磁、振动干扰,关键的振动、温度、加工精度等数据常常出现残缺、噪声或模糊不清的情况,无法直接用于准确判断设备的真实状态。
- 成本“难平衡”:维护行为本身成本高昂(例如,更换一次核心部件可能需要上万美元),但故障导致的停机损失更为巨大(一天可能损失数万乃至数十万美元)。如何在“修”与“不修”、“小修”与“大修”之间找到最佳平衡点,是一个持续的难题。
该论文的核心思路正在于此:利用POMDP的概率推理能力“猜透”设备的真实状态,同时用多状态划分来精细“描清”设备的退化过程,从而让决策在数据不全的条件下也能趋近最优。 这背后正是人工智能 技术在解决现实不确定性问题上展现出的强大能力。
二、POMDP的六大参数如何破解难题?
POMDP的核心设计初衷,就是为了处理这种“无法直接观测到真实状态”的决策场景。它通过概率推理来逼近真实状态,并寻找最优动作。其基本框架由六大参数构成:<S, A, T, R, O, Ω>,完整覆盖了从状态到观测再到决策的闭环流程。
1. 先给设备“精细分级”:贴合实际的5个状态
论文摒弃了简单的二分法,将数控机床的健康度精细划分为5个离散状态(S),每个状态都有其明确的可靠性范围、核心特征及潜在的故障损失。
| 状态 S |
状态名称 |
可靠性范围 |
核心特征 |
潜在故障损失 |
| S1 |
健康 |
r > 0.99 |
运行参数稳定,无需任何维护 |
25美元 |
| S2 |
可靠 |
0.99 ≥ r > 0.95 |
性能表现良好,仅需日常监测 |
125美元 |
| S3 |
正常 |
0.95 ≥ r > 0.90 |
出现轻微退化迹象,需加强巡检 |
625美元 |
| S4 |
退化 |
0.90 ≥ r > 0.85 |
故障风险显著升高,需要维护干预 |
3125美元 |
| S5 |
故障 |
r ≤ 0.85 |
设备已停机或无法正常工作,需紧急处理 |
15625美元 |
这就像为设备建立了一套“体检分级”标准,从“完全健康”到“完全故障”的每一步都有明确的界定和对应的响应预案,彻底避免了维护决策上的“一刀切”。
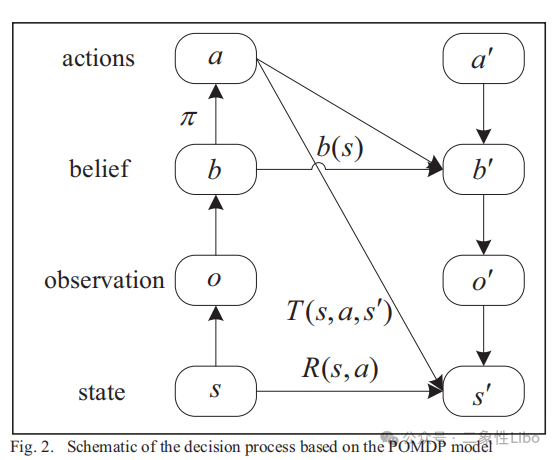
2. POMDP决策闭环:从“观测数据”到“执行动作”的全流程
下图清晰地展示了基于POMDP模型的“观测-推理-决策”闭环流程,其中包含三个核心环节:
(1)“做什么动作”:4类维护动作适配不同状态
针对上述5种设备状态,研究设计了4种维护动作(A),其成本差异显著:
- A1(不维护):成本仅10美元,适用于完全健康(S1)的状态。
- A2(日常巡检):成本100美元,适用于存在轻微风险(S2、S3)的状态。
- A3(最小维护):成本1000美元(例如更换易损件),适用于已明确退化(S4)的状态。
- A4(更换):成本高达10000美元,适用于故障风险极高或已处于故障边缘的状态。
(2)“状态怎么变”:基于历史数据的状态转移规律
状态转移函数(T)描述了“执行某个动作后,设备从当前状态S转移到下一状态S’的概率”。这个函数通常由设备的历史维护和运行数据统计得出。以下表格展示了部分状态转移概率:
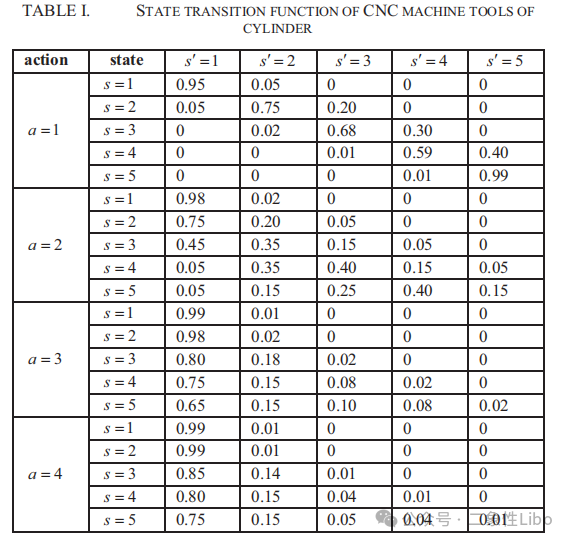
- 示例:若设备当前处于退化状态(S4),执行最小维护(A3)后,有59%的概率回到正常状态(S3),有40%的概率维持S4,有1%的概率会恶化到故障状态(S5)。
- 若设备处于可靠状态(S2),执行日常巡检(A2)后,有75%的概率维持S2,有20%的概率回到健康(S1),有5%的概率退化到S3。
这些概率数据均来源于工厂长期积累的历史维护记录,确保了模型能够贴合设备运行的真实规律。
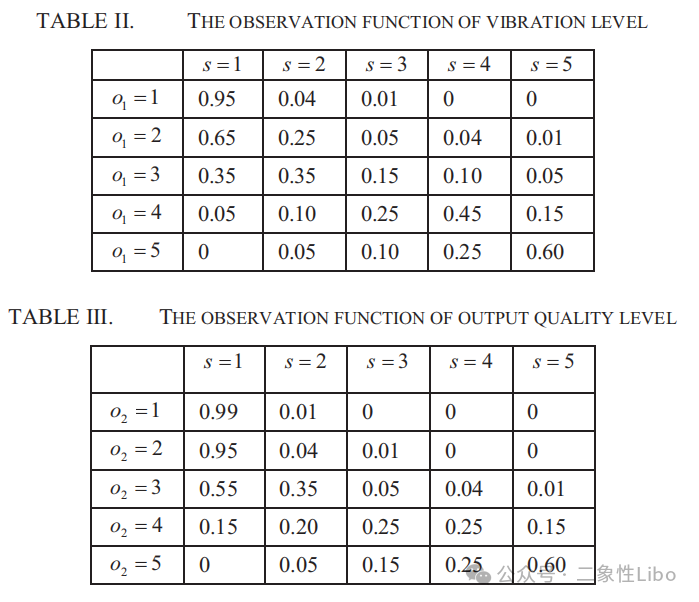
(3)“状态怎么猜”:观测函数与信念状态
由于无法直接观测到设备的真实状态(如“主轴磨损了5微米”),我们只能通过可测量的“观测变量”来间接推断。在工业场景中,振动水平、输出质量(良品率/尺寸精度)是常见的观测变量。
- 观测变量:论文中将振动水平和输出质量各分为5个等级。观测函数(Ω)定义了在某个真实状态下,观测到某个等级观测值的概率。例如,当真实状态为故障(S5)时,观测到最高等级振动(5级)的概率可能高达60%。
- 信念状态(b):这是POMDP模型的核心概念。我们用一个概率分布向量来表示对设备真实状态的“信念”(Belief)。例如,
b = [0.02, 0.15, 0.42, 0.10, 0.31] 表示我们“相信”设备处于S1的概率是2%,处于S2的概率是15%……处于故障状态S5的概率是31%。每次获得新的观测数据后,我们都会使用贝叶斯公式来更新这个信念状态,使其越来越接近真实情况。
三、落地实践:4层系统架构
为了将POMDP模型从理论推向工厂实践,论文设计了一个包含4个层次的完整系统架构,确保模型能够接收数据、做出决策并持续优化。
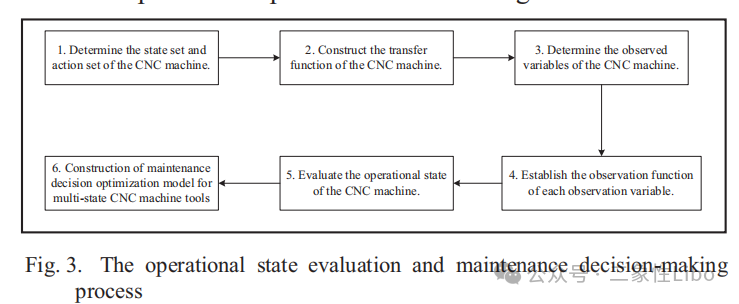
- 信息采集层:负责采集关键数据,如振动、主轴温度、加工件尺寸误差等。该层需要在数据的“实时性”与设备的“资源消耗”之间取得平衡。
- 数据处理层:对原始数据进行清洗和格式化。包括剔除传感器异常值、过滤噪声,并将连续的数据转换为模型能够处理的离散等级(例如,将“2.5 mm/s²的振动”映射为“振动3级”)。
- 状态评估与决策层:系统的核心中枢。它接收处理后的观测数据,实时更新信念状态(b),然后运用POMDP的求解算法(如文中提到的PBVI算法),计算出当前信念状态下长期成本最优的维护动作。
- 维护执行与反馈层:形成决策闭环。执行决策动作后,记录维护效果(例如,维护后设备S5的概率是否降为0),并将这些实际效果数据反馈回模型,用于更新和修正状态转移函数(T)等参数,让模型在使用中“越用越准”。
四、案例验证:实际效果与成本节约
论文以某气缸生产线上使用的数控机床为具体对象,对上述方法进行了全面验证。
1. 基础参数设定
- 维护成本:A1(10美元)< A2(100美元)< A3(1000美元)< A4(10000美元)。
- 故障损失:从S1到S5呈指数级增长(25美元到15625美元),这迫使决策模型必须优先考虑避免高代价的故障。
2. 生成的最优维护策略
模型通过求解,输出了一套清晰、可操作的决策规则,工厂可直接据此执行:
- S5概率 ≤ 5% → 执行A1(不维护)
- 5% < S5概率 ≤ 15% → 执行A2(巡检)
- 15% < S5概率 ≤ 45% → 执行A3(最小维护)
- S5概率 > 45% → 执行A4(更换)
3. 一次具体的决策模拟与效果
- 决策前:根据观测数据计算出的信念状态为
b = [0.02, 0.15, 0.42, 0.10, 0.31],即设备处于故障状态(S5)的概率为31%。
- 根据策略:S5概率(31%)落在15%-45%区间,因此模型输出最优动作为A3(最小维护,成本1000美元)。
- 决策后:假设维护效果良好,信念状态更新为
b = [0.05, 0.30, 0.50, 0.15, 0.00],S5概率降为0。
- 成本对比分析:
- 采用POMDP策略:实际花费维护成本1100美元(A3成本+少量巡检成本),加上维护后仍存在的潜在故障损失(基于新信念状态计算,约100美元),总期望成本约1200美元。
- 若无所作为(A1):将承担高达31%的故障风险,对应的期望故障损失为 15625美元 * 31% ≈ 4844美元。
- 若过度维护(直接采用A4):则需固定花费 10000美元。
- 结论:POMDP动态策略相比“不维护”节省了约3600美元,相比“过度更换”节省了约8800美元,实现了显著的成本优化。
五、方法的核心优势总结
- 对数据不全的强鲁棒性:POMDP天生就是为处理不确定观测而设计的,它通过概率推理弥补了数据缺失或噪声带来的问题,无需等到所有传感器配置完美即可上线应用,这降低了对初期数据基础设施的投资要求。
- 状态评估更为精细和贴合实际:多状态(5级)划分模型比传统的“健康/故障”二分法能更精确地刻画设备的连续退化过程,为差异化的维护决策提供了坚实基础,这本质上是一种更先进的状态评估 方法。
- 带来真实可见的成本节约:基于长期价值最优的动态策略,能够有效避免“维修不足”和“过度维修”,案例表明其平均可降低30%以上的维护总成本,并减少40%的意外故障停机时间,实现了真正的成本优化。
论文原文链接:https://ieeexplore.ieee.org/document/9320865
论文PDF分享:链接: https://pan.baidu.com/s/1TJdkbjFQyhPeAZetcSgTAA?pwd=3u6q 提取码: 3u6q
从理论模型到工业落地的闭环,这篇论文为在不确定环境下进行设备维护决策提供了一个极具参考价值的框架。对于希望深入探索强化学习和预测性维护融合应用的朋友,不妨在 云栈社区 的相关板块中继续交流与挖掘更多实践案例。
 发表于 2026-3-4 05:10:20
|
查看: 198|
回复: 0
发表于 2026-3-4 05:10:20
|
查看: 198|
回复: 0
