来自北京航空航天大学与澳门大学的研究团队联合发布了一款名为VecCity的开源工具库。该工具库旨在解决地图实体表征学习(Map Entity Representation Learning,MapRL)领域的碎片化问题,首次为点(POI)、线(道路)、面(地块)等不同类型的地图要素提供了统一的建模、预训练与评测框架。
通过集成9个城市的标准化数据集、复现21种主流模型,VecCity为研究人员和开发者提供了一站式工具集,支持从数据处理、模型训练到性能评估的全流程开发。
基于VecCity这一标准化平台,研究团队对不同技术路线进行了系统性对比,揭示了各自的优势与适用场景。例如,结合了“Token-Graph-Sequence”三阶段建模的模型在道路表征任务中表现最佳;引入序列增强与对比学习的技术在POI任务上优势显著;而图神经网络则在处理复杂空间关系时展现出更强的鲁棒性。
VecCity算法库基于团队此前开发的LibCity时空数据处理统一基座平台,旨在为MapRL领域构建重要的基础设施。相关研究成果已被VLDB 2025接收,代码已完全开源。
论文标题:
VecCity: A Taxonomy-guided Library for Map Entity Representation Learning
论文链接:
https://arxiv.org/abs/2411.00874
代码链接:
https://github.com/Beihang-BIGSCity/VecCity
研究背景
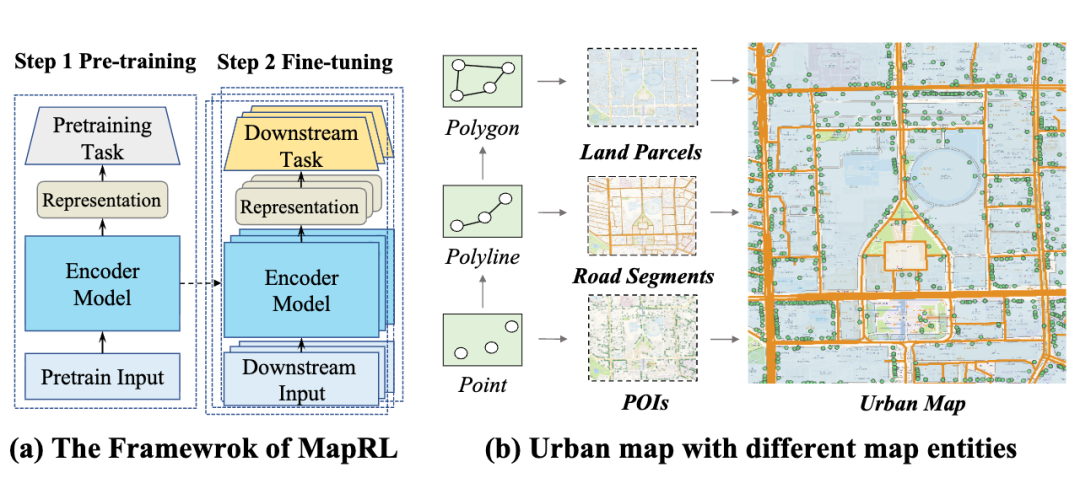
电子地图由兴趣点(POI)、路段(Road Segment)和地块(Land Parcel)等多种类型的实体构成,分别对应几何学中的点、线、面要素。这些实体承载着丰富的时空信息,是智能交通系统(ITS)和基于位置的服务(LBS)等应用的核心基础。
地图实体表征学习(MapRL)通过预训练技术生成通用、可复用的数据向量表示,是高效管理与利用地图数据的关键。然而,该领域目前面临两大挑战:
- 研究碎片化:现有工作大多按“点、线、面”等实体类型划分,技术难以跨实体复用,阻碍了领域融通。
- 缺乏统一基准:不同模型在不同数据集和实验设置下评估,缺乏标准化的Benchmark,导致横向对比困难,难以总结通用设计原则。
为此,本文提出了一种全新的、基于方法(Method-based)的MapRL模型分类体系,并构建了开源算法库VecCity。主要贡献包括:
- 全新的分类体系:从编码器、预训练任务与下游任务等核心功能模块对模型进行统一解构与归类,打破实体类型壁垒。
- 统一的开源算法库:实现数据处理、模型实现、训练与评估的深度解耦,支持高效复用与灵活组合。
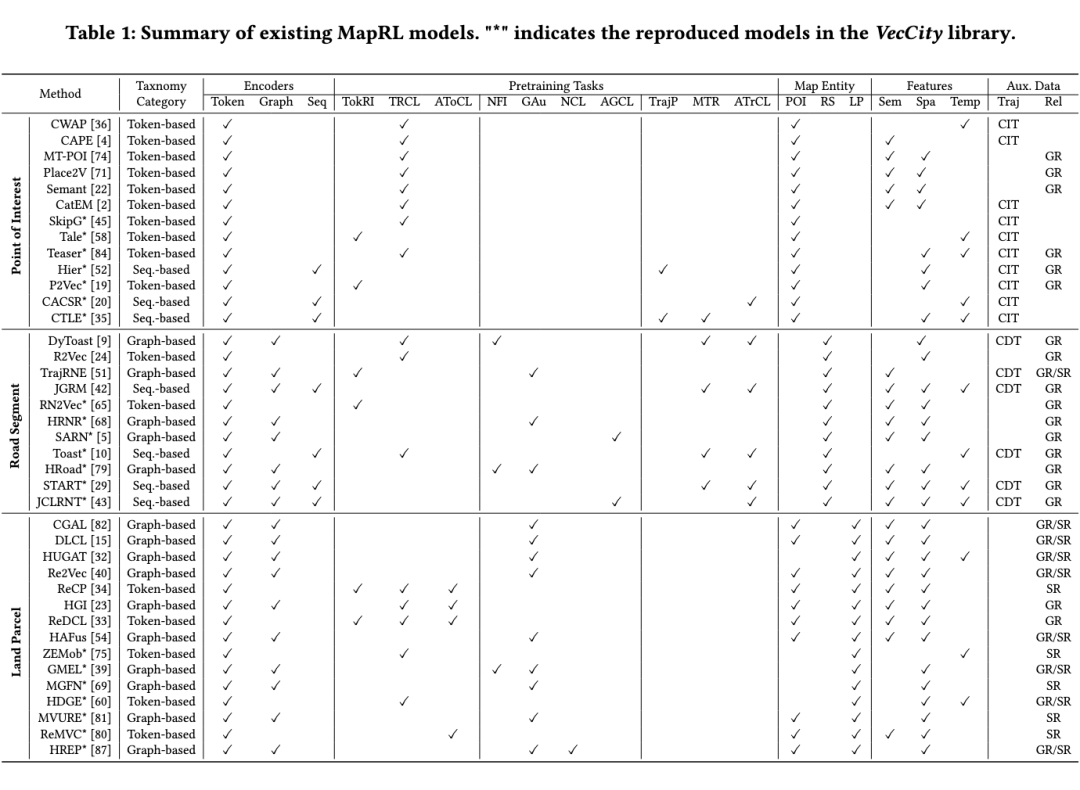
- 标准化评测基准:整合9城数据,复现21个主流模型,建立了领域内首个标准化Benchmark。
基于方法的统一分类体系
为打破碎片化僵局,本文不再以实体类型为核心,而是围绕模型的功能模块进行解构,提出了一种Method-based的分类体系。
该体系将MapRL模型解构为四个核心要素:
- 地图数据(Map Data):抽象为地图实体(含ID、类型、几何形状及属性)和辅助数据(轨迹与关系网络),为模型提供上下文。
- 编码器模型(Encoder Models):将原始数据映射到向量空间的核心引擎,分为三大范式:
- Token-based编码器:处理实体静态属性特征,构建基础语义嵌入。
- Graph-based编码器:利用图神经网络(GNN)建模实体间拓扑关联,捕捉空间结构信息。
- Sequence-based编码器:利用Transformer、RNN等序列模型处理轨迹数据,捕捉时序动态。
- 预训练任务(Pre-training Tasks):提炼出一套跨实体类型的通用自监督学习目标,如Token级的属性推理、Graph级的图结构重构、Sequence级的掩码轨迹恢复等。
- 下游任务(Downstream Tasks):将预训练表征适配于具体应用场景的接口,如POI分类、路段速度推断、地块人流预测等。
基于此分类体系对主流模型梳理后发现,先进模型普遍遵循“Token → Graph → Sequence”的渐进式建模流水线。
VecCity:分类学指导的开源算法库
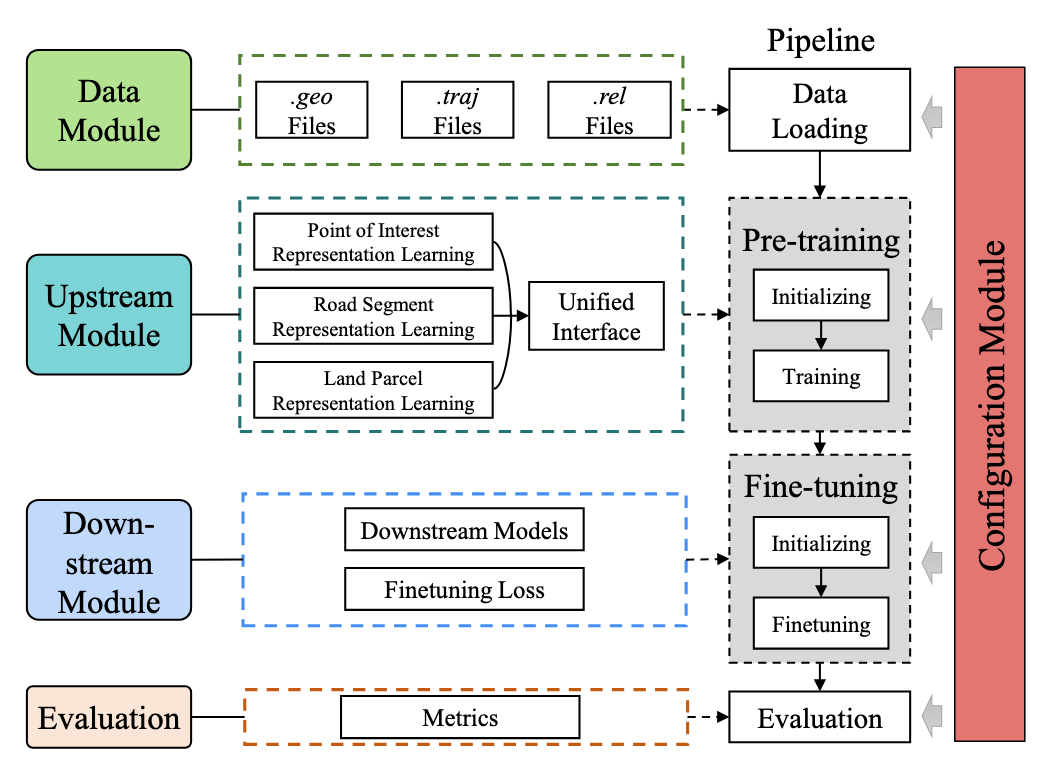
基于上述分类体系开发的VecCity算法库,是一个标准化的开发平台,其核心架构包含:
- 数据模块(Data Module):
- 定义了
geo(地图实体)、traj(轨迹)、rel(关系网络)三种原子文件格式,统一数据加载。
- 预置了纽约、北京、东京等9个城市的标准化数据集,并提供数据转换脚本支持私有数据导入。
- 上游模块(Upstream Module):
- 通过
encode()和pretraining_loss()接口将编码器与预训练任务解耦。
- 集成了21个主流MapRL模型(POI、路段、地块各7个),作为易用的Baseline。
- 下游模块(Downstream Module):
- 提供
downstream_model()和finetuning_loss()接口支持灵活微调。
- 内置POI分类、旅行时间估计、地块人流预测等9类下游任务,用于全方位评估表征质量。
- 配置与评估(Configuration & Evaluation):通过统一配置文件控制实验全生命周期,简化流程。
实验分析
利用VecCity建立的标准化Benchmark,研究团队对21个模型进行了全面评测与分析。
4.1 总体性能对比

- POI表征学习:CTLE、CACSR等引入序列编码器的模型表现显著更优。分析发现,相比传统的下一跳预测(TrajP),掩码轨迹恢复(MTR)和增强轨迹对比学习(ATCL)等能迫使模型捕捉长距离时序依赖的任务,能生成判别力更强的POI表征。
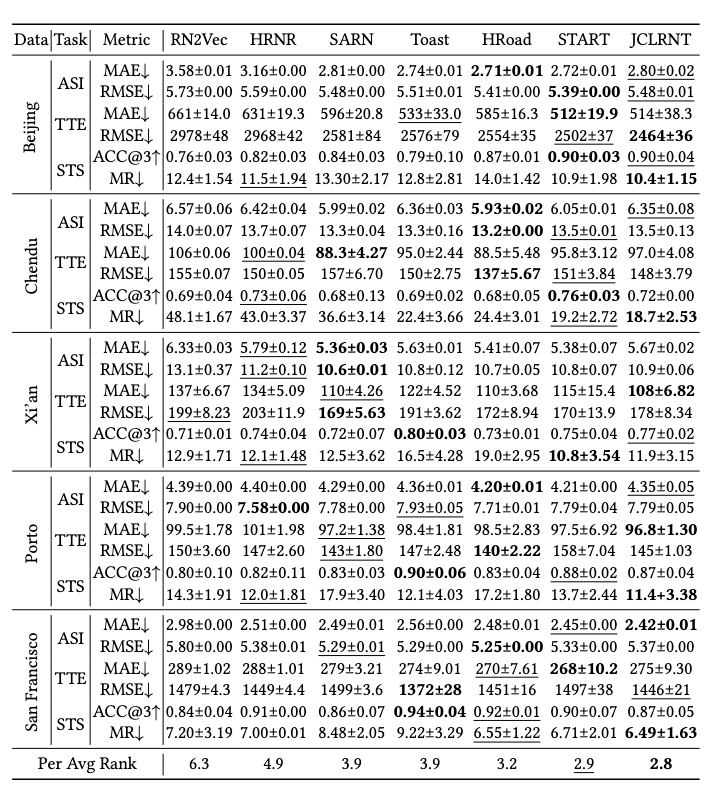
- 路段表征学习:JCLRNT、START等采用“Token + Graph + Sequence”全流程建模的模型性能最佳。这表明精准刻画路段需同时融合静态路网结构(Graph)与动态交通流序列(Sequence)。多视角预训练(如图对比+轨迹对比)作用显著。

- 地块表征学习:ReMVC、HREP等显式融合POI语义特征的模型,显著优于仅利用人流数据的模型。POI分布提供了关键的上下文信息。目前主流仍是Token+Graph架构,序列信息利用尚有空间。
- 核心发现:POI语义特征的显式融合是理解地块功能属性的核心。
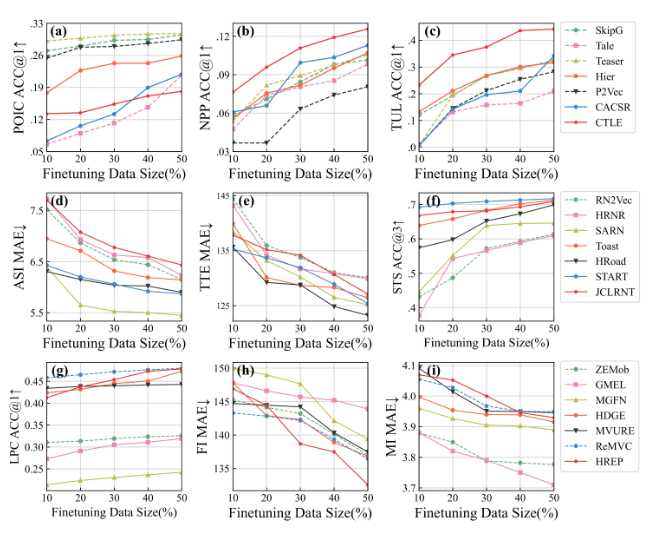
4.2 深入探究:预训练任务的组合效应
通过消融实验探究了不同预训练任务组合的效果,并针对不同实体揭示了最优配置:

- POI:TokRI(关系推理)+ MTR(掩码轨迹恢复)组合最优,兼顾语义与长程时序依赖。数据稀疏时,TrajP(轨迹预测)鲁棒性更强。
- 路段:AGCL(增强图对比学习)为基础,捕捉空间依赖。数据密度高时可引入MTR增强时序表达;稀疏时辅助以TrajP。
- 地块:AToCL(增强Token对比学习)最优,能过滤噪声提炼核心功能属性。涉及社交网络时,GAu(图重建)任务可提供补充。
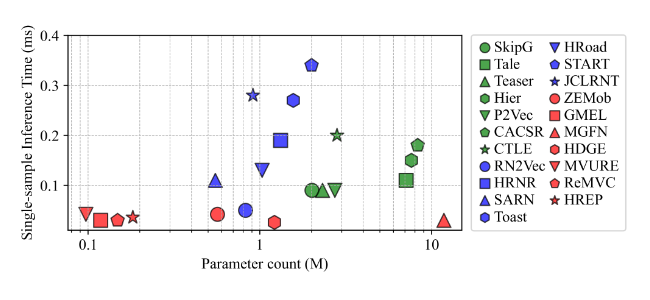
4.3 效率与可扩展性分析
从参数量、训练及推理时间三个维度评估了模型效率,为实际应用选型提供参考:
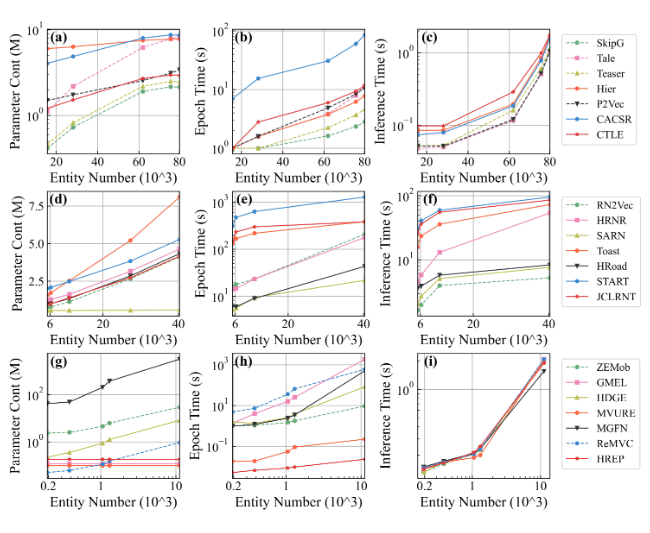
- Token-based模型:结构简单,扩展性极佳,训练耗时和参数量低,适合大规模实时场景。
- Graph-based模型:效率依赖任务复杂度。采用图自编码器(GAu)的任务可能随节点数超线性增长,而采用高效采样策略的模型更具鲁棒性。
- Sequence-based模型:精度提升显著,但普遍面临参数量激增和推理延迟问题,更适合对延时容忍度高的离线分析场景。
实践启示:不存在“完美模型”,需在模型复杂度(精度)与推理时延(效率)间寻求平衡。全流程模型追求极致精度,轻量级模型适用于大规模实时服务。
总结
VecCity通过原创的“方法学驱动”分类体系,突破了地图实体表征学习领域的碎片化困境,首次实现了跨POI、道路、地块的通用化建模框架。它集成了多城市数据与主流模型,构建了该领域首个系统化、可复现的标准基准。
系统的评测揭示了不同技术路线的特性:全流程三阶段模型擅长道路场景,序列增强与对比学习在POI任务中优势显著,而图神经网络在复杂关系建模中更具鲁棒性。这些结论为算法选型与设计优化提供了清晰的实证依据。
凭借其模块化、标准化与全面评测能力,VecCity不仅提升了研发效率,更为MapRL领域的理论创新与应用落地提供了坚实的基础设施。
相关信息
引用:
@article{10.14778/3742728.3742749,
author = {Zhang, Wentao and Wang, Jingyuan and Yang, Yifan and U, Leong Hou},
title = {VecCity: A Taxonomy-Guided Library for Map Entity Representation Learning},
year = {2025},
volume = {18},
number = {8},
doi = {10.14778/3742728.3742749},
journal = {Proceedings of the VLDB Endowment.},
pages = {2575–2588},
}
 发表于 2025-12-11 04:10:39
|
查看: 289|
回复: 0
发表于 2025-12-11 04:10:39
|
查看: 289|
回复: 0
